第八章理想流体多维流动基础
在自然界和流体机械中,流体的流动通常不是一维的,流动参数不仅仅沿流动方向变化,而且在垂直于流向的横截面上也发生变化,这就需要运用多维流的理论和分析方法来加以研究。因此,就要在一维流的基础上,学习并掌握多维流的一些基本理论和基本方程。
8.1 有旋流动
有旋流动的主要特征是流场中流体微团的旋转角速度不为零,因此,判断一个流场中流体运动是否有旋的判据就是看它的旋转角速度是否等于零。
有旋流动又称旋涡流动,在自然界人们可以观察到大量的旋涡流动,例如龙卷风、水流流过障碍物后产生的旋涡等。除了这些可以直接观察到的流体旋涡外,流体与固体壁面之间的相对运动、两层不同速度流体的交汇也会产生大量的旋涡流动。这些肉眼可见和不可见的旋涡运动有其自身特有的运动规律。本节的内容就是介绍表达有旋流动的主要参数以及这些参数间的关系。
8.1.1 涡量、涡线、涡面和涡管
在有旋流动的流场中处处存在旋转角速度ω,因此,与研究运动流体速度场类似,可以将带旋涡运动角速度ω的流体运动矢量场作为研究对象,简称旋涡场。
前面己经证明,流体旋转角速度ω是速度场旋度的1/2,即
\(\omega =0.5\nabla \times V\)
而速度场的旋度\(\nabla \times V\)又称为涡量,常用Ω表示,即
\(\Omega =\nabla \times V=2\omega \) (8.1)
涡量是一个描述旋涡运动常用的物理量。
在描述流体速度场时,曾经引入了流线、流面和流管的概念,它清楚地显示出流体运动的速度特征和流量通量特征。与此相似,为了表征流体在旋涡场中的旋涡流动,我们在旋涡场中也可以找出与速度场中流线、流面、流管对应的涡线、涡面和涡管来。
涡线是流场中某一时刻的一条空间曲线,在该时刻这条曲线上每一点的流动角速度矢量ω都与该点曲线的切线方向一致,如图8.1所示。
根据涡线的定义,可以写出与流线方程类似的涡线方程,即
\(\frac{dx}{{{\omega }_{x}}}=\frac{dy}{{{\omega }_{y}}}=\frac{dz}{{{\omega }_{z}}}\) (8.2a)
或写成矢量形式 \(dr\times \omega =0\) (8.2b)
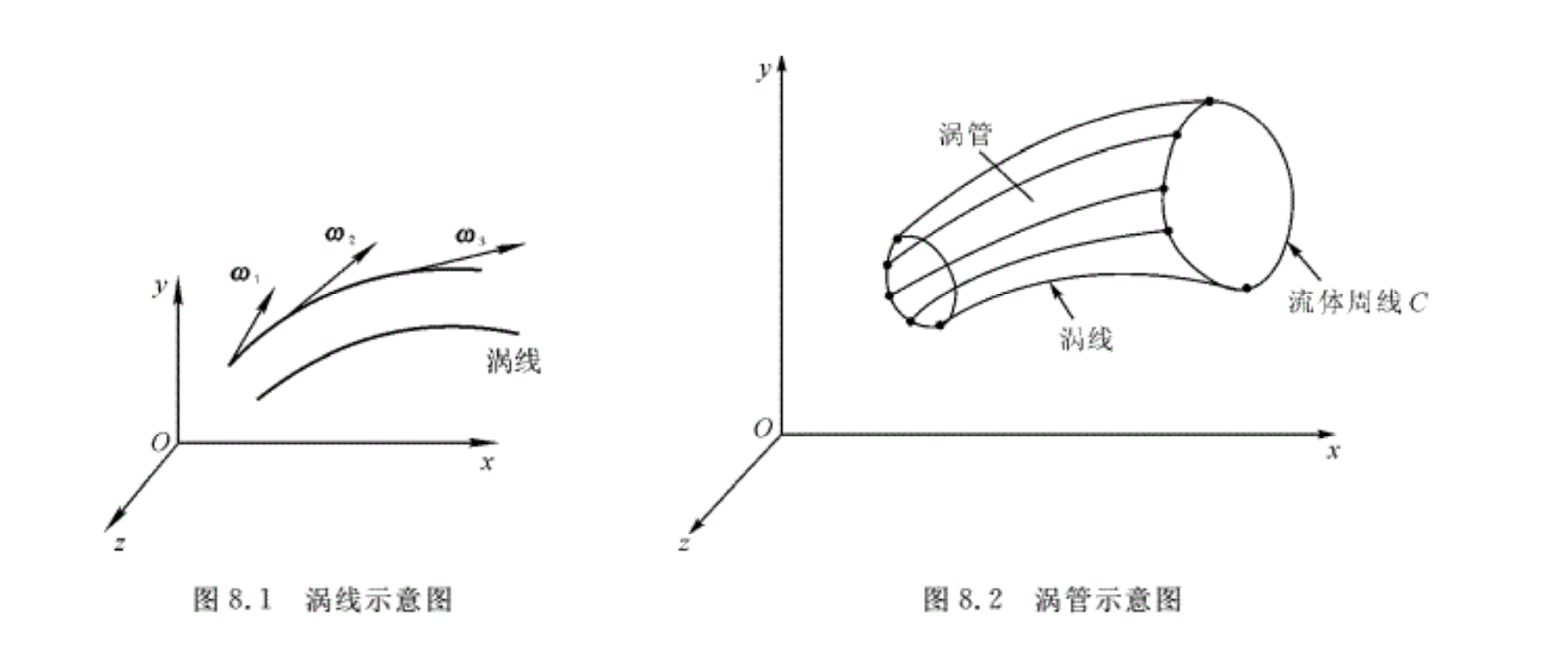
与流面、流管的定义类似,我们用涡面和涡管来描述旋涡运动。所谓涡面,就是某一时刻通过一条非涡线的空间曲线的所有涡线构成的曲面。而管状涡面的内域就是涡管。也可以说,如果在旋涡场中取一非涡线的封闭曲线,过该曲线每一点的所有涡线组成的管状曲面称为涡管,如图8.2所示。
流面对于流量具有不穿透性,流管对于流量具有封闭性;与流面、流管类似,涡面对于涡量具有不穿透性,涡管对于涡量具有封闭性。在涡面上,有
Ω • n=0
涡量在涡面的法向投影等于零。
8.1.2 速度环量
流场中流体运动速度沿某一给定封闭曲线的线积分称为绕该曲线的速度环量,通常用\({{\Gamma }_{c}}\)表示。在流体力学中,速度环量是一个重要的物理量,它的大小实际上代表了旋涡流动的强度,因此,可以用速度环量作为旋涡流动定量分析的特征量。在流场中取一条任意的空间封闭曲线C,如图8.3所示,沿该曲线流体运动速度连续变化。根据环量的定义,速度环量可以写为
\({{\Gamma }_{c}}\)=∮C(V•dl)=∮C(Vcosαdl) (8.3)
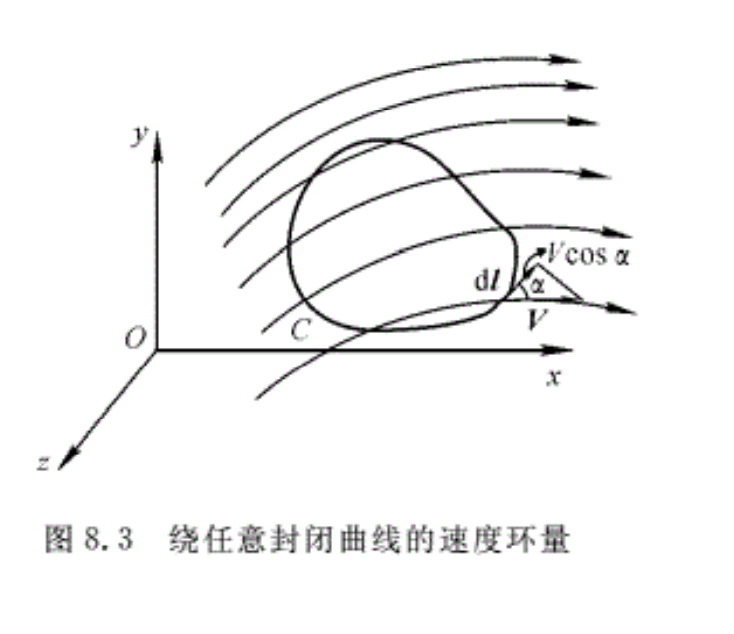
式中,dl代表曲线C上一个长度为dl的微小弧段,它的方向必然就是曲线C在该处的切线方向。由于
\(\begin{align}& V={{V}_{x}}i+{{V}_{y}}j+{{V}_{z}}k \\& dl=dxi+dyj+dzk \\\end{align}\)
因此,环量
\({{\Gamma }_{c}}=\oint_{C}{\left( {{V}_{x}}dx+{{V}_{y}}dy+{{V}_{z}}dz \right)}\) (8.4)
这是速度环量的一般表达式,一般取逆时针方向为速度环量积分的正方向。
8.1.3 速度环量与旋涡强度的关系
流场中速度环量是沿某一给定封闭曲线的线积分,若速度环量不为零,则说明该封闭曲线所在曲面内的流动是有旋的。利用联系线积分与面积分的斯托克斯公式,可以把式(8.4)写成
\(\begin{align}& {{\Gamma }_{c}}=\oint_{C}{\left( {{V}_{x}}dx+{{V}_{y}}dy+{{V}_{z}}dz \right)}= \\& \int{\left[ \left( \frac{\partial {{V}_{z}}}{\partial y}-\frac{\partial {{V}_{y}}}{\partial z} \right)dydz+\left( \frac{\partial {{V}_{x}}}{\partial z}-\frac{\partial {{V}_{z}}}{\partial x} \right)dzdx+\left( \frac{\partial {{V}_{y}}}{\partial x}-\frac{\partial {{V}_{x}}}{\partial y} \right)dxdy \right]} \\& \\\end{align}\)
可以看出,式中第二个等号右边小括号内的三项分别是旋度的三个分量,因此
\({{\Gamma }_{c}}=\oint_{C}{\left( {{V}_{x}}dx+{{V}_{y}}dy+{{V}_{z}}dz \right)}=\)∫A(▽ x V)•dA=∫A(Ω•dA) (8.5)
式中, C是空间曲面A的边界。式(8.5)第二个等号右边是面积A上的旋涡强度,或称为通过面积A的涡通量。该式说明,沿空间任意封闭曲线的速度环量,等于通过以该曲线为边界的任意空间连续曲面的涡通量。
式(8.5)建立了速度环量与旋涡强度之间的关系。在实际流动中,旋涡强度或涡通量通常不能直接测量,而流动速度的测量相对要容易一些,因此,速度环量可以作为旋涡运动定量分析的代表量。
8.2 无旋流动和速度势
速度旋度处处为零的流动定义为无旋流动,其所在流场称为无旋流场。或者说,如果在流场中,\(\nabla \times V=0\)那么该速度场为无旋流场,这种流动就是无旋流动。在直角坐标系中,无旋流动的条件可以写成
\(\begin{align}& \frac{\partial {{V}_{z}}}{\partial y}=\frac{\partial {{V}_{y}}}{\partial z} \\& \frac{\partial {{V}_{x}}}{\partial z}=\frac{\partial {{V}_{z}}}{\partial x} \\& \frac{\partial {{V}_{y}}}{\partial x}=\frac{\partial {{V}_{x}}}{\partial y} \\\end{align}\) (8.6)
显然,不满足上述条件的流动就是有旋流动。流体运动是否有旋仅仅取决于流体微团是否作旋转运动,而与流体微团的运动轨迹无关。图8.4表示了无旋流动和有旋流动的两个例子。8.4(a)表示尽管流体运动轨迹近似是圆周,但是流体微团自身并没有作旋转运动;图 8.4(b)表示流体运动轨迹是直线,然而流体微团在运动过程中作旋转运动,因此流动是有旋的。黏性流体在直壁附近的流动就是这种性质的有旋流动。

式(8.6)表明在无旋流中速度的交叉偏导数相等。因此,在流场中必然存在着这样一个函数φ(x,y,z,t),它对于某一坐标的偏导数等于速度在该坐标方向的分速度,即\(\nabla \varphi =V\),式中函数称为势函数或速度势,因此
\(\begin{align}& \frac{\partial \varphi }{\partial x}={{V}_{x}} \\& \frac{\partial \varphi }{\partial y}={{V}_{y}} \\& \frac{\partial \varphi }{\partial z}={{V}_{z}} \\\end{align}\) (8.7)
我们很容易证明,无旋条件与势函数的相互依存关系为
\(\left\{ \begin{align}& \frac{\partial {{V}_{z}}}{\partial y}=\frac{\partial }{\partial y}\left( \frac{\partial \varphi }{\partial z} \right)=\frac{{{\partial }^{2}}\varphi }{\partial y\partial z}=\frac{\partial }{\partial z}\left( \frac{\partial \varphi }{\partial y} \right)=\frac{\partial {{V}_{y}}}{\partial z} \\& \frac{\partial {{V}_{x}}}{\partial z}=\frac{\partial }{\partial z}\left( \frac{\partial \varphi }{\partial x} \right)=\frac{{{\partial }^{2}}\varphi }{\partial z\partial x}=\frac{\partial }{\partial x}\left( \frac{\partial \varphi }{\partial z} \right)=\frac{\partial {{V}_{z}}}{\partial x} \\& \frac{\partial {{V}_{y}}}{\partial x}=\frac{\partial }{\partial x}\left( \frac{\partial \varphi }{\partial y} \right)=\frac{{{\partial }^{2}}\varphi }{\partial x\partial y}=\frac{\partial }{\partial y}\left( \frac{\partial \varphi }{\partial x} \right)=\frac{\partial {{V}_{x}}}{\partial y} \\\end{align} \right.\)
上式表明,速度交叉偏导数相等的式(8.6)是势函数存在的充分必要条件。这说明,只要流动无旋,就必然存在势函数;反之,如果流场中存在势函数,那么该流场就一定是无旋流场。
若流动是定常的,那么势函数只是空间坐标的数,因此势函数的全微分可以表示为
\(d\varphi =\frac{\partial \varphi }{\partial x}dx+\frac{\partial \varphi }{\partial y}dy+\frac{\partial \varphi }{\partial z}dz={{V}_{x}}dx+{{V}_{y}}dy+{{V}_{z}}dz\) (8.8)
从这些关系式中可以看出,当人们在研究某一具体流动时,如果能够找出描写该流动特征的势函数,那么就可以利用势函数的性质式(8. 7)求出这一流动的各点速度,再利用伯努利方程求出全场的压力分布。可见在理想流体的研究中,利用势函数来求解是很方便的。
例8.1 证明在有势流动中,沿任意方向的速度分量等于速度势在该方向的导数。
证明:设某点速度为V,而Vs是V在任一方向s上的投影,则
\({{V}_{s}}={{V}_{x}}\cos \theta +{{V}_{y}}\cos \alpha +{{V}_{z}}\cos \beta \) (a)
而速度势沿s方向的偏导数为
\(\frac{\partial \varphi }{\partial s}=\frac{\partial \varphi }{\partial x}\frac{dx}{ds}+\frac{\partial \varphi }{\partial y}\frac{dy}{ds}+\frac{\partial \varphi }{\partial z}\frac{dz}{ds}={{V}_{x}}\frac{dx}{ds}+{{V}_{y}}\frac{dy}{ds}+{{V}_{z}}\frac{dz}{ds}\) (b)
但 \(\begin{align}& \frac{dx}{ds}=\cos \theta \\& \frac{dy}{ds}=\cos \alpha \\& \frac{dz}{ds}=\cos \beta \\\end{align}\) (c)
将式(c)代入式(b),并与式(a)比较,得∂φ/∂s=Vs。证毕。 (8.9)
例8.2 证明单连域无旋流场中,速度环量总为零。
证明:由于无旋流场中必定存在速度势故无旋流场中沿任意封闭曲线的速度环量为
\({{\Gamma }_{c}}=\oint_{C}{\left( {{V}_{x}}dx+{{V}_{y}}dy+{{V}_{z}}dz \right)}=\oint_{C}{d\varphi }\)
对于单连域,φ一定是单值函数,故
\({{\Gamma }_{c}}=\oint_{C}{d\varphi }=0\)
证毕。这说明在单连域无旋流场中,沿空间任意封闭曲线的环量总为零。如果流场不是单连域,则沿任意封闭曲线环量可能不等于零。
例8.3 有一个二维平面流场,其速度分布为
Vx=x+t,Vy=-y+t
试判断流场是否为无旋流场,若无旋,求速度势函数。
解:因∂Vx/∂y=∂Vy/∂x=0,故为无旋流场,必然存在速度势函数φ
\(\begin{align}& \varphi \left( x,y,z,t \right)=\int{\frac{\partial \varphi }{\partial x}}dx+f\left( y,t \right)=\int{\left( x+t \right)}dx+f\left( y,t \right)=\frac{1}{2}{{x}^{2}}+tx+f\left( y,t \right) \\& {{V}_{y}}=\frac{\partial \varphi }{\partial y}=\frac{\partial f\left( y,t \right)}{\partial y}=-y+t \\\end{align}\)
得 \(f\left( y,t \right)=-\frac{1}{2}{{y}^{2}}+yt+g\left( t \right)\)
所以 \(\varphi \left( x,y,z,t \right)=0.5{{x}^{2}}-0.5{{y}^{2}}+\left( x+y \right)t+g\left( t \right)\)
令当x=y=0时,φ=0,则g(t)=0,所以速度势为
\(\varphi \left( x,y,z,t \right)=\frac{1}{2}\left( {{x}^{2}}-{{y}^{2}} \right)+\left( x+y \right)t\)
势函数中的常数项一般都不考虑。
8.3 微分形式的连续方程
图8.5所示为微元控制体(dx,dy,dz)。在微元控制体内近似有
\(\int_{cv}{\frac{\partial \rho }{\partial t}}dv\approx \frac{\partial \rho }{\partial t}dxdydz\)
考虑到控制体形式的连续方程式(3.32),有
\(\frac{\partial \rho }{\partial t}dxdydz+{{\sum\limits_{i}{\left( {{\rho }_{i}}{{V}_{i}}{{A}_{i}} \right)}}_{out}}-{{\sum\limits_{i}{\left( {{\rho }_{i}}{{V}_{i}}{{A}_{i}} \right)}}_{in}}=0\) (8.10)
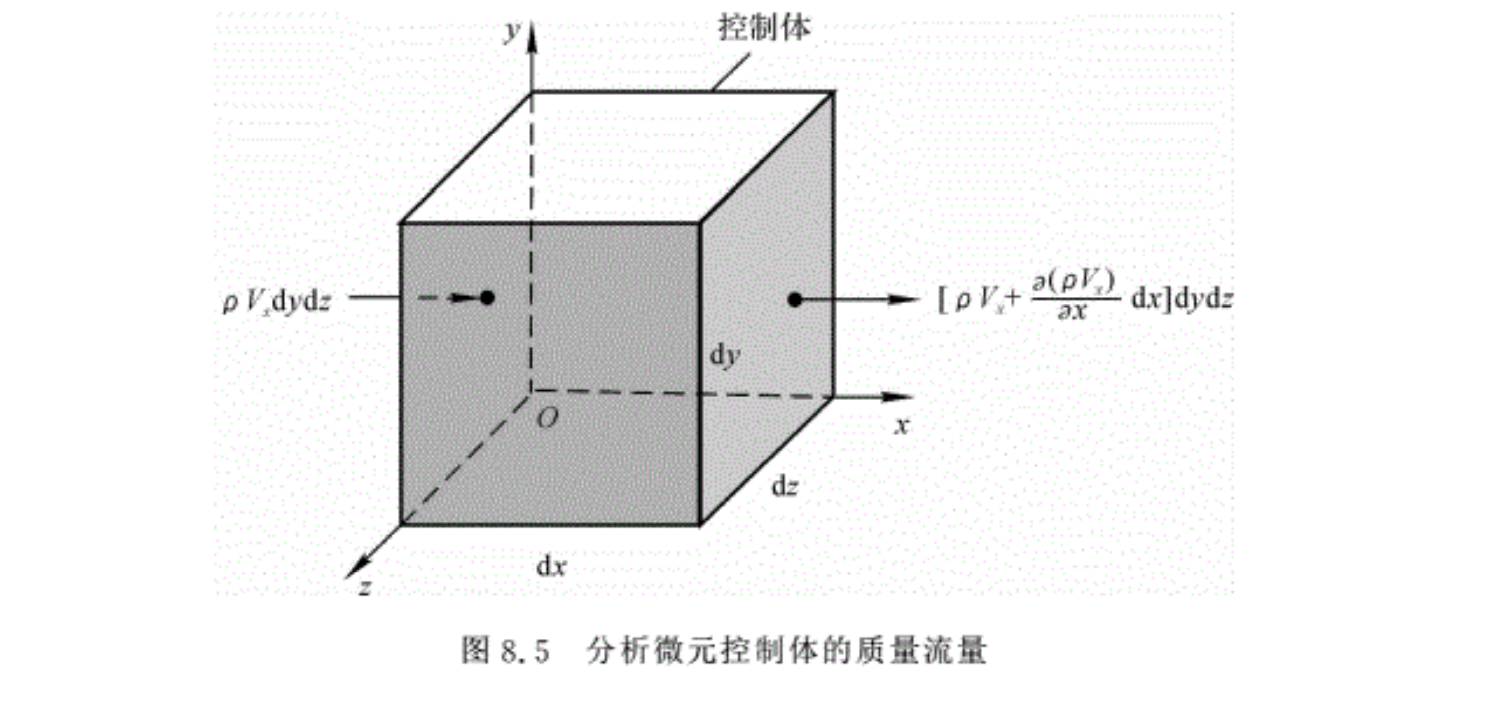
质量流率项发生在6个面上,包括3个进口、3个出口。根据第一章连续介质和场的概念,流体具有的各个物理量都是坐标和时间的函数,例如ρ=ρ(x,y,z,t)。因此,如已知左边面上单位面积的质量流量为ρVx,则由泰勒公式可知右边面上的单位面积的质量流量为ρVx+[∂(ρVx)/∂x]dx。所以在x方向的质量流量应为
\(\left\{ \rho {{V}_{x}}+\left[ \partial \left( \rho {{V}_{x}} \right)/\partial x \right]dx \right\}dydz-\rho {{V}_{x}}dydz=\left[ \partial \left( \rho {{V}_{x}} \right)/\partial x \right]dxdydz\)
同理,可以得岀在y,z方向的质量流量分别为
\(\begin{align}& \left[ \partial \left( \rho {{V}_{y}} \right)/\partial y \right]dxdydz \\& \left[ \partial \left( \rho {{V}_{z}} \right)/\partial z \right]dxdydz \\\end{align}\)
代入式( 8. 10 ) ,得
\(\frac{\partial \rho }{\partial t}dxdydz+\frac{\partial \left( \rho {{V}_{x}} \right)}{\partial x}dxdydz+\frac{\partial \left( \rho {{V}_{y}} \right)}{\partial y}dxdydz+\frac{\partial \left( \rho {{V}_{z}} \right)}{\partial z}dxdydz=0\)
两边同除以dxdyddz ,得出
\(\frac{\partial \rho }{\partial t}+\frac{\partial \left( \rho {{V}_{x}} \right)}{\partial x}+\frac{\partial \left( \rho {{V}_{y}} \right)}{\partial y}+\frac{\partial \left( \rho {{V}_{z}} \right)}{\partial z}=0\) (8.11)
式( 8.11 )即为直角坐标系下微分形式的连续方程。
连续方程可以写成矢量形式为
∂ρ/∂t+▽•(ρV)=0 (8.12)
将方程式( 8.12 )展开,有
\(\frac{\partial \rho }{\partial t}+{{V}_{x}}\frac{\partial \rho }{\partial x}+{{V}_{y}}\frac{\partial \rho }{\partial y}+{{V}_{z}}\frac{\partial \rho }{\partial z}+\rho \left( \frac{\partial {{V}_{x}}}{\partial x}+\frac{\partial {{V}_{y}}}{\partial y}+\frac{\partial {{V}_{z}}}{\partial z} \right)=0\)
前4项之和表示密度的随流导数,故
\(\frac{\partial \rho }{\partial t}+\rho \left( \frac{\partial {{V}_{x}}}{\partial x}+\frac{\partial {{V}_{y}}}{\partial y}+\frac{\partial {{V}_{z}}}{\partial z} \right)=0\)
或 dρ/dt+ρ▽•V=0 (8.13)
对于定常流动, ∂/∂t=0 ,由式( 8.12 )可得连续方程为
▽•(ρV)=0 (8.14)
对于不可压流动, dρ/dt= 0 ,由式( 8.13 )可得连续方程为
▽•V=0 (8.15)
对于圆柱坐标系,可取一扇形微元控制体rdrdθdz,经过与上述类似的推导,可得岀圆柱坐标系微分形式连续方程为
\(\frac{\partial \rho }{\partial t}+\frac{\partial \left( r\rho {{V}_{r}} \right)}{r\partial r}+\frac{\partial \left( \rho {{V}_{\theta }} \right)}{r\partial \theta }+\frac{\partial \left( \rho {{V}_{z}} \right)}{\partial z}=0\) (8.16)
或 \(\frac{d\rho }{dt}+\rho \left[ \frac{\partial \left( r{{V}_{r}} \right)}{r\partial r}+\frac{\partial {{V}_{\theta }}}{r\partial \theta }+\frac{\partial {{V}_{z}}}{\partial z} \right]=0\) (8.17)
例8.4 试判断下述流动是否不可压。
(1)V=y²i十z²j+ (y+z)k;
(2)Vr=2rsinθcosθ,Vθ=2rcos²θ。
解:(1) \(\frac{\partial {{V}_{x}}}{\partial x}+\frac{\partial {{V}_{y}}}{\partial y}+\frac{\partial {{V}_{z}}}{\partial z}=1\ne 0\)
说明该流场不可能是不可压流动。
(2) \(\frac{\partial \left( r{{V}_{r}} \right)}{r\partial r}+\frac{\partial \left( {{V}_{\theta }} \right)}{r\partial \theta }+\frac{\partial \left( {{V}_{z}} \right)}{\partial z}=2\sin \theta \cos \theta +2\sin \theta \cos \theta -4\sin \theta \cos \theta +0=0\)
说明该流场是不可压流动。
例8.5 若速度场和密度场分别为
V=-xi/t+3z²j-(z³/y+y)k,ρ=4ty
判断该流动是否满足连续方程。
解: \(\begin{align}\frac{\partial \rho }{\partial t}+{{V}_{x}}\frac{\partial \rho }{\partial x}+{{V}_{y}}\frac{\partial \rho }{\partial y}+{{V}_{z}}\frac{\partial \rho }{\partial z}+\rho \left( \frac{\partial {{V}_{x}}}{\partial x}+\frac{\partial {{V}_{y}}}{\partial y}+\frac{\partial {{V}_{z}}}{\partial z} \right)= \\ 4y+3{{z}^{2}}\times 4t+4ty\left( -\frac{1}{t}-\frac{3{{z}^{2}}}{y} \right)=4y+12{{z}^{2}}t-4y-12{{z}^{2}}t=0 \\\end{align}\)
说明给定的速度场和密度场满足连续方程。
例8.6 一个不可压速度场为
Vx=a(x²-y²),Vz=b
式中,a,b为常数,试求Vy。
解: 根据连续方程有
\(\frac{\partial }{\partial x}\left( a{{x}^{2}}-a{{y}^{2}} \right)+\frac{\partial {{V}_{y}}}{\partial y}+\frac{\partial b}{\partial z}=0\)
即 \(\frac{\partial {{V}_{y}}}{\partial y}=-2ax\)
积分上式,得 \({{V}_{y}}\left( x,y,z,t \right)=-2axy+f\left( x,z,t \right)\)
式中,等号右边第二项为关于x,z,t的任意函数,若取f(x,z,t)=0,则Vy=-2axy。
8.4 欧拉运动微分方程及其积分
8.4.1 微分形式的动量方程一一欧拉运动微分方程
早在1775年,著名的科学家欧拉通过理论分析建立了理想流体运动与受力的微分方程式,这就是有名的微分形式的动量方程,即欧拉运动微分方程。
1.直角坐标系的欧拉运动微分方程
假设流体是无黏性的理想流体,流体属性是连续变化的。在直角坐标系描述的流场中取边长分别为dx,dy,dz的微元立方体,如图8.6所示。
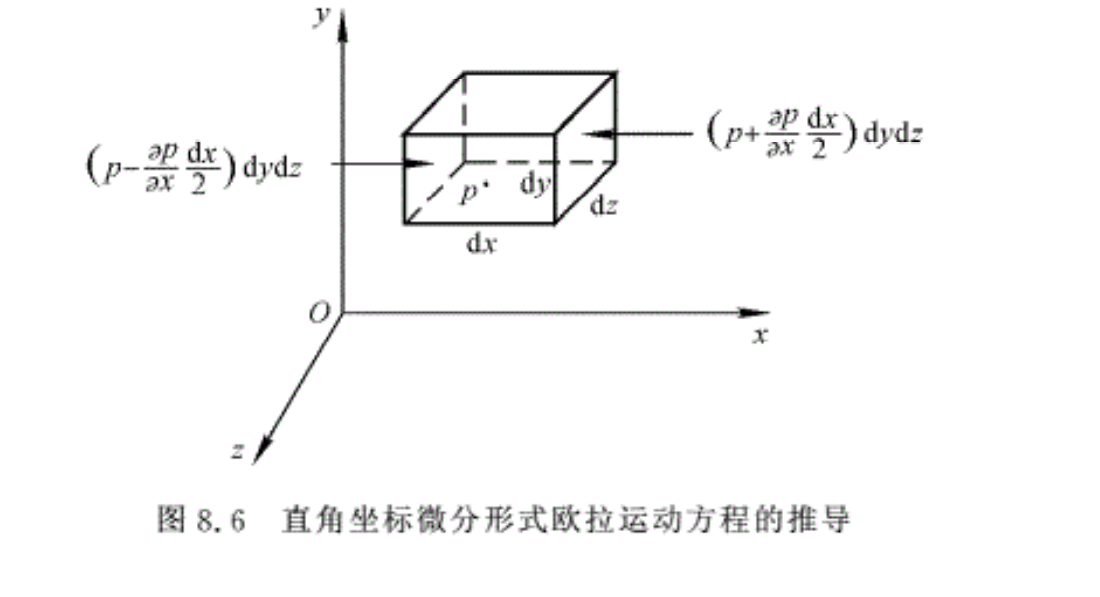
设微元体中心点的压强为p,则在微元体x正方向所在的微元面上,其压强为
\(p+\frac{\partial p}{\partial x}\frac{dx}{2}\)
在微元体x负方向所在的微元面上,其压强为
\(p-\frac{\partial p}{\partial x}\frac{dx}{2}\)
该微元体在x方向上受到的质量力为ρXdxdydz,那么,根据牛顿第二运动定律,作用在该微元体x方向上的全部外力,即表面力和质量力,将等于微元体的质量ρdxdydz与x方向的加速度dVx/dt之乘积,即
\(\left( p-\frac{\partial p}{\partial x}\frac{dx}{2} \right)dydz-\left( p+\frac{\partial p}{\partial x}\frac{dx}{2} \right)dydz+\rho Xdxdydz=\rho dxdydz\frac{d{{V}_{x}}}{dt}\)
上式化简后,得到
\(X-\frac{1}{\rho }\frac{\partial p}{\partial x}=\frac{d{{V}_{x}}}{dt}\)
这就是理想流体在x方向微分形式的动量方程。类似地,在y方向和z方向同样可以建立起各自方向微分形式的动量方程,即
\(\begin{align}& Y-\frac{1}{\rho }\frac{\partial p}{\partial y}=\frac{d{{V}_{y}}}{dt} \\& Z-\frac{1}{\rho }\frac{\partial p}{\partial z}=\frac{d{{V}_{z}}}{dt} \\\end{align}\)
上述方程组可以与成矢量形式
R–▽p/ρ=dV/dt (8.18)
如果将x,y,z方向的微分方程等号右边在直角坐标系中展开,就得到如下表达式:
\(\left. \begin{align}& X-\frac{1}{\rho }\frac{\partial p}{\partial x}=\frac{\partial {{V}_{x}}}{\partial t}+{{V}_{x}}\frac{\partial {{V}_{x}}}{\partial x}+{{V}_{y}}\frac{\partial {{V}_{x}}}{\partial y}+{{V}_{z}}\frac{\partial {{V}_{x}}}{\partial z} \\& Y-\frac{1}{\rho }\frac{\partial p}{\partial y}=\frac{\partial {{V}_{y}}}{\partial t}+{{V}_{x}}\frac{\partial {{V}_{y}}}{\partial x}+{{V}_{y}}\frac{\partial {{V}_{y}}}{\partial y}+{{V}_{z}}\frac{\partial {{V}_{y}}}{\partial z} \\& Z-\frac{1}{\rho }\frac{\partial p}{\partial z}=\frac{\partial {{V}_{z}}}{\partial t}+{{V}_{x}}\frac{\partial {{V}_{z}}}{\partial x}+{{V}_{y}}\frac{\partial {{V}_{z}}}{\partial y}+{{V}_{z}}\frac{\partial {{V}_{z}}}{\partial z} \\\end{align} \right\}\) (8.19)
这就是直角坐标系中无黏性理想流体的欧拉运动微分方程式。当然,式(8.19)也可以写成如下形式:
R–▽p/ρ=∂V/∂t+(V•▽)V (8.20)
如果忽略质量力,那么式(8.20)可以改写为
–▽p/ρ=∂V/∂t+(V•▽)V (8.21)
2.圆柱坐标系下的欧拉运动微分方程
在许多实际问题中,例如,研究流体在旋转机械中的流动问题时,采用圆柱坐标系比较方便,因此,有必要在r,θ,z规定的圆柱坐标系下,建立欧拉运动微分方程。与直角坐标系中推导过程类似,在流场中取rdrdθdz微元体内的流体作为研究对象,列出全部表面力和质量力,建立三个方向的受力和运动微分方程式,就得到如下的圆柱坐标系的欧拉运动微分方程,其形式与直角坐标系下的表达式略有不同:
\(\left. \begin{align}& {{R}_{r}}-\frac{1}{\rho }\frac{\partial p}{\partial r}=\frac{\partial {{V}_{r}}}{\partial t}+{{V}_{r}}\frac{\partial {{V}_{r}}}{\partial r}+{{V}_{\theta }}\frac{\partial {{V}_{r}}}{r\partial \theta }+{{V}_{z}}\frac{\partial {{V}_{r}}}{\partial z}-\frac{V_{\theta }^{2}}{r} \\& {{R}_{\theta }}-\frac{1}{\rho }\frac{\partial p}{r\partial \theta }=\frac{\partial {{V}_{\theta }}}{\partial t}+{{V}_{r}}\frac{\partial {{V}_{\theta }}}{\partial r}+{{V}_{\theta }}\frac{\partial {{V}_{\theta }}}{r\partial \theta }+{{V}_{z}}\frac{\partial {{V}_{\theta }}}{\partial z}+\frac{{{V}_{r}}{{V}_{\theta }}}{r} \\& {{R}_{z}}-\frac{1}{\rho }\frac{\partial p}{\partial z}=\frac{\partial {{V}_{z}}}{\partial t}+{{V}_{r}}\frac{\partial {{V}_{z}}}{\partial r}+{{V}_{\theta }}\frac{\partial {{V}_{z}}}{r\partial \theta }+{{V}_{z}}\frac{\partial {{V}_{z}}}{\partial z} \\\end{align} \right\}\) (8.22)
式中,Rr,Rθ, Rz分别为流体单位质量的质量力在径向、切向和轴向的投影。
8.4.2 欧拉运动微分方程的积分
微分形式的欧拉运动方程描述了无黏性理想流体受力及其运动的关系。它是一组偏微分方程,在通常的情况下是难以积分求解的。研究发现,在某些特定条件的限制下,欧拉运动方程可以得到积分解。下面就两种情况分别介绍它的积分解。
1.定常流沿流线的积分
第三章己经介绍过流线的概念,在定常流中,流线和迹线重合。直角坐标系中的流线方程可以写为
\(\frac{dx}{{{V}_{x}}}=\frac{dy}{{{V}_{y}}}=\frac{dz}{{{V}_{z}}}\)
上式还可以改写为
\(\left. \begin{align}& {{V}_{x}}dy={{V}_{y}}dx \\& {{V}_{y}}dz={{V}_{z}}dy \\& {{V}_{z}}dx={{V}_{x}}dz \\\end{align} \right\}\) (8.23)
如果将欧拉运动微分方程式(8.19)表示的x,y,z三个方向的方程等号两边分别乘以 dx,dy,dz并引入定常流的条件,就可以得到下列表达式:
\(\left. \begin{align}& Xdx-\frac{1}{\rho }\frac{\partial p}{\partial x}dx={{V}_{x}}\frac{\partial {{V}_{x}}}{\partial x}dx+{{V}_{y}}\frac{\partial {{V}_{x}}}{\partial y}dx+{{V}_{z}}\frac{\partial {{V}_{x}}}{\partial z}dx \\& Ydy-\frac{1}{\rho }\frac{\partial p}{\partial y}dy={{V}_{x}}\frac{\partial {{V}_{y}}}{\partial x}dy+{{V}_{y}}\frac{\partial {{V}_{y}}}{\partial y}dy+{{V}_{z}}\frac{\partial {{V}_{y}}}{\partial z}dy \\& Zdz-\frac{1}{\rho }\frac{\partial p}{\partial z}dz={{V}_{x}}\frac{\partial {{V}_{z}}}{\partial x}dz+{{V}_{y}}\frac{\partial {{V}_{z}}}{\partial y}dz+{{V}_{z}}\frac{\partial {{V}_{z}}}{\partial z}dz \\\end{align} \right\}\) (8.24)
将式(8.24)等号右边的相关项用流线方程式(8.23)的表达式改写,例如,第一个方程右边的Vydx用Vxdy来代替,Vzdx用Vxdz来代替,y方向和z方向的方程也照此办理,那么式(8.24)就可以改写为
\[\begin{align}& Xdx-\frac{1}{\rho }\frac{\partial p}{\partial x}dx={{V}_{x}}\frac{\partial {{V}_{x}}}{\partial x}dx+{{V}_{x}}\frac{\partial {{V}_{x}}}{\partial y}dy+{{V}_{x}}\frac{\partial {{V}_{x}}}{\partial z}dz \\& Ydy-\frac{1}{\rho }\frac{\partial p}{\partial y}dy={{V}_{x}}\frac{\partial {{V}_{y}}}{\partial x}dx+{{V}_{y}}\frac{\partial {{V}_{y}}}{\partial y}dy+{{V}_{y}}\frac{\partial {{V}_{y}}}{\partial z}dz \\& Zdz-\frac{1}{\rho }\frac{\partial p}{\partial z}dz={{V}_{x}}\frac{\partial {{V}_{z}}}{\partial x}dx+{{V}_{z}}\frac{\partial {{V}_{z}}}{\partial y}dy+{{V}_{z}}\frac{\partial {{V}_{z}}}{\partial z}dz \\\end{align}\]
将上述三个方程相加,并利用定常流和全微分的表达式,即
\[\begin{align}& dU=\frac{\partial U}{\partial x}dx+\frac{\partial U}{\partial y}dy+\frac{\partial U}{\partial z}dz=Xdx+Ydy+Zdz \\& dp=\frac{\partial p}{\partial x}dx+\frac{\partial p}{\partial y}dy+\frac{\partial p}{\partial z}dz \\& d{{V}_{x}}=\frac{\partial {{V}_{x}}}{\partial x}dx+\frac{\partial {{V}_{x}}}{\partial y}dy+\frac{\partial {{V}_{x}}}{\partial z}dz \\& d{{V}_{y}}=\frac{\partial {{V}_{y}}}{\partial x}dx+\frac{\partial {{V}_{y}}}{\partial y}dy+\frac{\partial {{V}_{y}}}{\partial z}dz \\& d{{V}_{z}}=\frac{\partial {{V}_{z}}}{\partial x}dx+\frac{\partial {{V}_{z}}}{\partial y}dy+\frac{\partial {{V}_{z}}}{\partial z}dz \\\end{align}\]
式中,U代表质量力的势。这样一来,原来的微分形式欧拉运动方程就可以改写为全微分方程,即
\[dU-\frac{dp}{\rho }={{V}_{x}}d{{V}_{x}}+{{V}_{y}}d{{V}_{y}}+{{V}_{z}}d{{V}_{z}}=\frac{1}{2}d\left( V_{x}^{2}+V_{y}^{2}+V_{z}^{2} \right)=VdV\]
它可以写成更简洁的形式:
\(\frac{dp}{\rho }+VdV-dU=0\) (8.25)
通过上述变换,沿流线将原来的偏微分方程组,即欧拉运动方程式(8.19)改写成全微分方程,有时也将它称为微分形式的伯努利方程。在重力场中,它的表达式可以写为
\[\frac{dp}{\rho }+d\frac{{{V}^{2}}}{2}+gdz=0\]
将方程式(8.25)积分,就得到
\(\int{\frac{dp}{\rho }-U+\frac{{{V}^{2}}}{2}=C}\) (沿流线) (8.26)
方程式(8.26)中的常数称为伯努利常数。这说明,在定常流中,沿着同一条流线,只有一个确定的常数;但是在不同的流线上,各条流线的伯努利常数就不一定相同。
2.定常无旋流的积分
如果流动是定常无旋的,那么必然有
\[\begin{align}& \frac{\partial {{V}_{y}}}{\partial z}=\frac{\partial {{V}_{z}}}{\partial y} \\& \frac{\partial {{V}_{z}}}{\partial x}=\frac{\partial {{V}_{x}}}{\partial z} \\& \frac{\partial {{V}_{x}}}{\partial y}=\frac{\partial {{V}_{y}}}{\partial x} \\\end{align}\]
利用上述无旋、定常条件,可以将式(8.19)改写为
\[\begin{align}& X-\frac{1}{\rho }\frac{\partial p}{\partial x}={{V}_{x}}\frac{\partial {{V}_{x}}}{\partial x}+{{V}_{y}}\frac{\partial {{V}_{y}}}{\partial x}+{{V}_{z}}\frac{\partial {{V}_{z}}}{\partial x}=\frac{\partial }{\partial x}\left( \frac{{{V}^{2}}}{2} \right) \\& Y-\frac{1}{\rho }\frac{\partial p}{\partial x}={{V}_{x}}\frac{\partial {{V}_{x}}}{\partial y}+{{V}_{y}}\frac{\partial {{V}_{y}}}{\partial y}+{{V}_{z}}\frac{\partial {{V}_{z}}}{\partial y}=\frac{\partial }{\partial y}\left( \frac{{{V}^{2}}}{2} \right) \\& Z-\frac{1}{\rho }\frac{\partial p}{\partial x}={{V}_{x}}\frac{\partial {{V}_{x}}}{\partial z}+{{V}_{y}}\frac{\partial {{V}_{y}}}{\partial z}+{{V}_{z}}\frac{\partial {{V}_{z}}}{\partial z}=\frac{\partial }{\partial z}\left( \frac{{{V}^{2}}}{2} \right) \\\end{align}\]
将以上三式等号两边分别乘以dx,dy,dz后相加,同样可以得到
\(\frac{dp}{\rho }+d\frac{{{V}^{2}}}{2}-dU=0\) (8.27)
方程的形式与沿流线得到的方程式(8.25)完全相同,积分之,得到
\(\int{\frac{dp}{\rho }-U+\frac{{{V}^{2}}}{2}=C}\) (整个流场) (8.28)
此时,在整个流场积分常数都相同,即对所有流线,具有同一个积分常数。多维流动中伯努利方程的压强势能项∫dp/ρ与一维流时一样,在几种特殊情况下可积分出来(见第三章)。质量力势能项U,在重力场中U=-gz,对液体必须考虑,对于气体,则可以忽略不计。
8.5 其他形式的运动微分方程
8.5.1 葛罗米柯方程
葛罗米柯方程是经典的欧拉运动微分方程的另一种表达方法。近代科学技术的飞速前进和计算流体力学的迅猛发展,早期的欧拉运动方程已远不适应现代工程应用和理论分析的需要。在现代许多研究工作中,人们往往直接运用葛罗米柯方程而不再用早期经典的欧拉运动微分方程来分析和解决问题了。下面将采用两种方法从欧拉运动方程式(8.19)出发来推导葛罗米柯方程。
考察方程式(8.19)等号右边的后三项,以x方向为例来说明推导过程。
欧拉运动微分方程式(8.19)在y方向和z方向的表达式也可以用同样的方法进行变换,然后代入式(8.19),这样就得到了葛罗米柯运动微分方程,或称兰姆(Lamb)运动微分方程,即
\(\left. \begin{align}& X-\frac{1}{\rho }\frac{\partial p}{\partial x}=\frac{\partial {{V}_{x}}}{\partial t}+\frac{\partial }{\partial x}\left( \frac{{{V}^{2}}}{2} \right)+2\left( {{\omega }_{y}}{{V}_{z}}-{{\omega }_{z}}{{V}_{y}} \right) \\& Y-\frac{1}{\rho }\frac{\partial p}{\partial y}=\frac{\partial {{V}_{y}}}{\partial t}+\frac{\partial }{\partial y}\left( \frac{{{V}^{2}}}{2} \right)+2\left( {{\omega }_{z}}{{V}_{x}}-{{\omega }_{x}}{{V}_{z}} \right) \\& Z-\frac{1}{\rho }\frac{\partial p}{\partial z}=\frac{\partial {{V}_{z}}}{\partial t}+\frac{\partial }{\partial z}\left( \frac{{{V}^{2}}}{2} \right)+2\left( {{\omega }_{x}}{{V}_{y}}-{{\omega }_{y}}{{V}_{x}} \right) \\\end{align} \right\}\) (8.29)
式(8.29)也可以与成矢量形式,即
\(R-\frac{1}{\rho }\nabla p=\frac{\partial V}{\partial t}+\nabla \left( \frac{{{V}^{2}}}{2} \right)-V\left( \nabla \times V \right)\) (8.30)
推导葛罗米柯方程也可以直接从矢量形式的欧拉运动微分方程式(8.20)出发,利用矢量运算表达式
(▽•V)V=▽(V²/2)-V x (▽ x V)
直接得到矢量形式的葛罗米柯运动方程,将它在直角坐标系内展开,就是式(8.29)。
在圆柱坐标系,葛罗米柯方程为
\[\left. \begin{align}& {{R}_{r}}-\frac{1}{\rho }\frac{\partial p}{\partial r}=\frac{\partial {{V}_{r}}}{\partial t}+\frac{\partial }{\partial r}\left( \frac{{{V}^{2}}}{2} \right)+2\left( {{\omega }_{\theta }}{{V}_{z}}-{{\omega }_{z}}{{V}_{\theta }} \right) \\& {{R}_{\theta }}-\frac{1}{\rho }\frac{\partial p}{r\partial \theta }=\frac{\partial {{V}_{\theta }}}{\partial t}+\frac{\partial }{r\partial \theta }\left( \frac{{{V}^{2}}}{2} \right)+2\left( {{\omega }_{z}}{{V}_{r}}-{{\omega }_{r}}{{V}_{z}} \right) \\& {{R}_{z}}-\frac{1}{\rho }\frac{\partial p}{\partial z}=\frac{\partial {{V}_{z}}}{\partial t}+\frac{\partial }{\partial z}\left( \frac{{{V}^{2}}}{2} \right)+2\left( {{\omega }_{r}}{{V}_{\theta }}-{{\omega }_{\theta }}{{V}_{r}} \right) \\\end{align} \right\}\] (8.31)
葛罗米柯方程最重要的地方就是它将流体的一般运动分解成两部分:无旋的平移运动和有旋的旋涡运动。或者说,流体的运动一般总是包含两种运动形式:无旋运动和有旋运动。用该方程可以清晰地处理流体的无旋(有势)运动和有旋运动。
应该指出:
(1)以上方程仅仅适用于μ=0的无黏性流动(通常指理想流体)。
(2)它对可压缩和不可压缩流体都适用。
(3)对于一般的气体运动,质量力可以忽略。
(4)如果流动无旋,那么方程可以大大简化,即
\[\left. \begin{align}& X-\frac{1}{\rho }\frac{\partial p}{\partial x}=\frac{\partial {{V}_{r}}}{\partial t}+\frac{\partial }{\partial x}\left( \frac{{{V}^{2}}}{2} \right) \\& Y-\frac{1}{\rho }\frac{\partial p}{\partial y}=\frac{\partial {{V}_{\theta }}}{\partial t}+\frac{\partial }{\partial y}\left( \frac{{{V}^{2}}}{2} \right) \\& Z-\frac{1}{\rho }\frac{\partial p}{\partial z}=\frac{\partial {{V}_{z}}}{\partial t}+\frac{\partial }{\partial z}\left( \frac{{{V}^{2}}}{2} \right) \\\end{align} \right\}\] (8.32)
8.5.2 克罗克运动方程
从葛罗米柯运动方程出发,对于理想气体忽略质量力的条件下,运动方程为
\(\frac{\partial V}{\partial t}+\nabla \frac{{{V}^{2}}}{2}-V\times \left( \nabla \times V \right)=-\frac{1}{\rho }\nabla p\) (8.33)
由热力学知,熵s和焓h的关系为
\(Tds=dh-\frac{1}{\rho }dp\) (8.34)
对于直角坐标系,式(8.34)可以写成如下形式:
\(\left\{ \begin{align}& T\frac{\partial s}{\partial x}=\frac{\partial h}{\partial x}-\frac{1}{\rho }\frac{\partial p}{\partial x} \\& T\frac{\partial s}{\partial y}=\frac{\partial h}{\partial y}-\frac{1}{\rho }\frac{\partial p}{\partial y} \\& T\frac{\partial s}{\partial z}=\frac{\partial h}{\partial z}-\frac{1}{\rho }\frac{\partial p}{\partial z} \\\end{align} \right.\)
上式的矢量形式为
\(T\nabla s=\nabla h-\frac{1}{\rho }\nabla p\) (8.35)
代入式(8.33),得
\(\frac{\partial V}{\partial t}+\nabla \frac{{{V}^{2}}}{2}-V\times \left( \nabla \times V \right)=T\nabla s-\nabla h\) (8.36)
引入滞止焓的概念,式(8.36)可以写为
\(\frac{\partial V}{\partial t}-V\times \left( \nabla \times V \right)=T\nabla s-\nabla {{h}^{*}}\) (8.37)
式(8.37)即为无黏性理想气体的克罗克运动方程,又称为克罗克定理。克罗克运动方程最重要的地方是将焓梯度▽h*,熵梯度▽s、与旋度(V x ▽)联系起来,从而可以利用该方程分析理想气体的多维流动。
将方程式(8.37)写成直角坐标系中的表达式,则得直角坐标系中的分量式为
\(\left. \begin{align}& \frac{\partial {{V}_{x}}}{\partial t}+2\left( {{\omega }_{y}}{{V}_{z}}-{{\omega }_{z}}{{V}_{y}} \right)=T\frac{\partial s}{\partial x}-\frac{\partial {{h}^{*}}}{\partial x} \\& \frac{\partial {{V}_{y}}}{\partial t}+2\left( {{\omega }_{z}}{{V}_{x}}-{{\omega }_{x}}{{V}_{z}} \right)=T\frac{\partial s}{\partial y}-\frac{\partial {{h}^{*}}}{\partial y} \\& \frac{\partial {{V}_{z}}}{\partial t}+2\left( {{\omega }_{x}}{{V}_{y}}-{{\omega }_{y}}{{V}_{x}} \right)=T\frac{\partial s}{\partial z}-\frac{\partial {{h}^{*}}}{\partial z} \\\end{align} \right\}\) (8.38)
同样,可以得到柱坐标系中的三个分量式,即
\(\left. \begin{align}& \frac{\partial {{V}_{r}}}{\partial t}+2\left( {{\omega }_{\theta }}{{V}_{z}}-{{\omega }_{z}}{{V}_{\theta }} \right)=T\frac{\partial s}{\partial r}-\frac{\partial {{h}^{*}}}{\partial r} \\& \frac{\partial {{V}_{\theta }}}{\partial t}+2\left( {{\omega }_{z}}{{V}_{r}}-{{\omega }_{r}}{{V}_{z}} \right)=T\frac{\partial s}{r\partial \theta }-\frac{\partial {{h}^{*}}}{r\partial \theta } \\& \frac{\partial {{V}_{z}}}{\partial t}+2\left( {{\omega }_{r}}{{V}_{\theta }}-{{\omega }_{\theta }}{{V}_{r}} \right)=T\frac{\partial s}{\partial z}-\frac{\partial {{h}^{*}}}{\partial z} \\\end{align} \right\}\) (8.39)
定常流动中克罗克运动方程为
\(V\times \left( \nabla \times V \right)=\nabla {{h}^{*}}-T\nabla s\) (8.40)
下面用克罗克运动方程式(8.40)来分析无机械功交换的理想气体定常绝热流动的特点。
1.均能流(▽h*=0)
定常均能流是指整个流场中的总焓h*均匀分布,且不随时间变化的流动。因此整个流场具有相同的h*,▽h*=0,代入方程式(8.40),得
\(V\times \left( \nabla \times V \right)=-TVs\) (8.41)
由式(8.41)可知,如果存在有垂直于流线的熵梯度,则这种定常的均能流动为有旋流。
例如,通过曲线激波的波后流动就是这种流动。因为整个流动为均能流,波前为均匀的无旋流,波后为▽s≠0的有旋流动。而通过平面斜激波的流动虽然是均能的有旋流动,但波前、波后的流动均为无旋流动。
2.均熵流(▽s=0)
均熵流是指整个流场中的熵s均匀分布,因此整个流场中具有相同的s值,即▽s=0。而等熵流则表示沿流线熵值保持不变,即ds/dt=0,不同的流线具有不同的熵值。
对于均熵流,克罗克运动方程为
\(V\times \left( \nabla \times V \right)=\nabla {{h}^{*}}\) (8.42)
由式(8.42)可知,如果流场中的总焓梯度不等于零,则流动是有旋的。不过,在实际的流动中,如果流场中有总焓梯度,则必然伴随有熵梯度。
3.均熵均能流(▽s=0,▽h*=0)
均熵均能流是指整个流场的h*,s都均匀分布的流动。因此整个流场中具有相同的s值和h*值,即▽s=0,▽h*=0。这种情况下的克罗克运动方程为
\(V\times \left( \nabla \times V \right)=0\) (8.43a)
或写为 V × ω=0 (8.43b)
对应于式(8.43)的流动可能有以下三种流动,即
(1)V=0,静止流场,无实际意义;
(2)▽ × V=0,无旋流动;
(3)V//(▽ x V)即V//ω的流动,速度矢量平行于旋转角速度矢量,称为螺旋运动。这种流动只可能存在于三维流动中,如通过机翼从翼尖拖出去的涡的运动,就是这种螺旋运动。
由上述分析可知,在二维均熵均能流动中,流动一定是无旋的,反之亦然。但在三维均熵均能流动中,可能是无旋流动,也可能是有旋流动。根据开尔文定理(见第8.9节),如果初始无旋,则整个流动保持无旋;如果初始有旋,则流动必然保持有旋,且保持为螺旋运动。
8.5.3 速度势方程
对于无旋流动存在速度势,因此可以导出速度势方程,只要求出其中的函数φ,即可得到三个速度分量Vx,Vy,V这么。这样用求解一个φ方程代替求解三个速度分量方程就方便多了。本节的目的就是要导出速度势方程。
定常无旋流动的葛罗米柯运动方程为
\[\nabla \frac{{{V}^{2}}}{2}=-\frac{1}{\rho }\nabla p\]
用V点乘上式并移项,得
ρ(V • ▽)V²/2+(V • ▽)p=0 (a)
由声速方程▽p=c²▽ρ,两边点乘V,得
(V • ▽)p=c²(V • ▽)ρ
根据连续方程(V • ▽)ρ=-ρ▽•V,代入上式,得
(V • ▽)p=-c²-ρ▽•V (b)
将式(b)代入式(a),得
(V • ▽)V²/2 – c²▽•V=0 (8.44)
展开式(8.44),得
\({{V}_{x}}\frac{\partial }{\partial x}\left( \frac{{{V}^{2}}}{2} \right)+{{V}_{y}}\frac{\partial }{\partial y}\left( \frac{{{V}^{2}}}{2} \right)+{{V}_{z}}\frac{\partial }{\partial z}\left( \frac{{{V}^{2}}}{2} \right)-{{c}^{2}}\left( \frac{\partial {{V}_{x}}}{\partial x}+\frac{\partial {{V}_{y}}}{\partial y}+\frac{\partial {{V}_{z}}}{\partial z} \right)=0\)
展开左端并整理得
\(\begin{align}& \left( V_{x}^{2}-{{c}^{2}} \right)\frac{\partial {{V}_{x}}}{\partial x}+\left( V_{y}^{2}-{{c}^{2}} \right)\frac{\partial {{V}_{y}}}{\partial y}+\left( V_{z}^{2}-{{c}^{2}} \right)\frac{\partial {{V}_{z}}}{\partial z}+{{V}_{x}}{{V}_{y}}\left( \frac{\partial {{V}_{x}}}{\partial y}+\frac{\partial {{V}_{y}}}{\partial x} \right)+ \\& {{V}_{x}}{{V}_{z}}\left( \frac{\partial {{V}_{z}}}{\partial x}+\frac{\partial {{V}_{x}}}{\partial z} \right)+{{V}_{y}}{{V}_{z}}\left( \frac{\partial {{V}_{z}}}{\partial y}+\frac{\partial {{V}_{y}}}{\partial z} \right)=0 \\\end{align}\) (8.45)
根据速度势φ与速度的关系,有
\(\begin{align}& {{V}_{x}}=\frac{\partial \varphi }{\partial x}={{\varphi }_{x}},\frac{\partial {{V}_{x}}}{\partial x}={{\varphi }_{xx}},\frac{\partial {{V}_{x}}}{\partial y}={{\varphi }_{xy}},\frac{\partial {{V}_{x}}}{\partial z}={{\varphi }_{xz}} \\& {{V}_{y}}=\frac{\partial \varphi }{\partial y}={{\varphi }_{y}},\frac{\partial {{V}_{y}}}{\partial y}={{\varphi }_{yy}},\frac{\partial {{V}_{y}}}{\partial x}={{\varphi }_{yx}},\frac{\partial {{V}_{y}}}{\partial z}={{\varphi }_{yz}} \\& {{V}_{z}}=\frac{\partial \varphi }{\partial z}={{\varphi }_{z}},\frac{\partial {{V}_{z}}}{\partial z}={{\varphi }_{zz}},\frac{\partial {{V}_{z}}}{\partial x}={{\varphi }_{zx}},\frac{\partial {{V}_{z}}}{\partial y}={{\varphi }_{zy}} \\\end{align}\)
代入式(8.45),得
\(\begin{align}& \left( 1-\frac{\varphi _{x}^{2}}{{{c}^{2}}} \right){{\varphi }_{xx}}+\left( 1-\frac{\varphi _{y}^{2}}{{{c}^{2}}} \right){{\varphi }_{yy}}+\left( 1-\frac{\varphi _{z}^{2}}{{{c}^{2}}} \right){{\varphi }_{zz}}- \\& \frac{2{{\varphi }_{x}}{{\varphi }_{y}}}{{{c}^{2}}}{{\varphi }_{xy}}-\frac{2{{\varphi }_{x}}{{\varphi }_{z}}}{{{c}^{2}}}{{\varphi }_{xz}}-\frac{2{{\varphi }_{y}}{{\varphi }_{z}}}{{{c}^{2}}}{{\varphi }_{yz}}=0 \\\end{align}\) (8.46)
式(8.46)即为无黏性理想定常绝热无旋流动的速度势方程。
对于二维流,速度势方程简化为
\(\left( 1-\frac{\varphi _{x}^{2}}{{{c}^{2}}} \right){{\varphi }_{xx}}+\left( 1-\frac{\varphi _{y}^{2}}{{{c}^{2}}} \right){{\varphi }_{yy}}-\frac{2{{\varphi }_{x}}{{\varphi }_{y}}}{{{c}^{2}}}{{\varphi }_{xy}}=0\) (8.47)
速度势方程式(8.46)和式(8.47)是一个非线性的偏微分方程,须借助于计算机进行数值求解。对于二维不可压定常无旋流,c→∞,速度势方程简化为如下的拉普拉斯方程:
\({{\varphi }_{xx}}+{{\varphi }_{yy}}=0\) (8.48)
同样可以导出圆柱坐标系中的势函数方程为
\(\begin{align}& \left( 1-\frac{\varphi _{r}^{2}}{{{c}^{2}}} \right){{\varphi }_{rr}}+\left( 1-\frac{\varphi _{\theta }^{2}}{{{r}^{2}}{{c}^{2}}} \right)\frac{{{\varphi }_{\theta \theta }}}{{{r}^{2}}}+\left( 1-\frac{\varphi _{z}^{2}}{{{c}^{2}}} \right){{\varphi }_{zz}}- \\& \frac{2{{\varphi }_{r}}{{\varphi }_{\theta }}}{{{r}^{2}}{{c}^{2}}}{{\varphi }_{r\theta }}-\frac{2{{\varphi }_{\theta }}{{\varphi }_{z}}}{{{r}^{2}}{{c}^{2}}}{{\varphi }_{\theta z}}-\frac{2{{\varphi }_{r}}{{\varphi }_{z}}}{{{c}^{2}}}{{\varphi }_{rz}}+\frac{{{\varphi }_{r}}}{r}\left( 1+\frac{\varphi _{\theta }^{2}}{{{r}^{2}}{{c}^{2}}} \right)=0 \\\end{align}\) (8.49)
对轴对称流动,也可以导出势函数方程为
\(\left( 1-\frac{\varphi _{r}^{2}}{{{c}^{2}}} \right){{\varphi }_{rr}}+\left( 1-\frac{\varphi _{z}^{2}}{{{c}^{2}}} \right){{\varphi }_{zz}}-\frac{2{{\varphi }_{r}}{{\varphi }_{z}}}{{{c}^{2}}}{{\varphi }_{rz}}+\frac{{{\varphi }_{r}}}{r}=0\) (8.50)
有了速度势方程,对于无旋定常流动,就不用求解原始的气体动力学基本方程组,而通过求解势数方程,求出势函数后,即可求得速度分布,然后用其他方程求出p,T,ρ和Ma等。
8.5.4 二维定常流动中的流函数和流函数方程
在二维定常流动中,存在流函数,因此可以将运动方程用流函数来表示。下面分别对其进行讨论。
一、流函数的定义及其性质
二、维定常流动的连续方为
\[\frac{\partial \left( \rho {{V}_{x}} \right)}{\partial x}+\frac{\partial \left( \rho {{V}_{y}} \right)}{\partial y}=0\]
为了使定义的流函数与前面讨论的函数具有相同的量纲,将连续方程除以滞止密度ρ*后,改写成如下形式:
\(\frac{\partial }{\partial x}\left( \frac{\rho }{{{\rho }^{*}}}{{V}_{x}} \right)=\frac{\partial }{\partial y}\left( -\frac{\rho }{{{\rho }^{*}}}{{V}_{y}} \right)\) (a)
为叙述方便,令M=-ρVy/ρ*,N=ρVx/ρ*。由数学中曲线积分的性质可知,如果在规定的区域内,函数M和N及其导数∂M/∂y,∂N/∂x都连续,则该区域内存在点函数ψ(x,y),使得dψ=Mdx+Ndy成立的充要条件是∂M/∂y=∂N/∂x;因此该点函数ψ(x,y)的全微分可以写为
\[\begin{align}& d\psi =\frac{1}{{{\rho }^{*}}}\left( -\rho {{V}_{y}}dx+\rho {{V}_{x}}dy \right) \\& \left( 8.51a \right) \\& \psi \left( x,y \right)=\int{\frac{1}{{{\rho }^{*}}}\left( -\rho {{V}_{y}}dx+\rho {{V}_{x}}dy \right)} \\& \left( 8.51b \right) \\\end{align}\]
称函数ψ(x,y)为流函数。式(8.51)就是流函数的定义式。
在圆柱坐标系中,轴对称流动是二维流动(∂/∂θ=0),定常流动的连续方程为
\[\frac{\partial }{r\partial r}\left( r\rho {{V}_{r}} \right)+\frac{\partial }{\partial z}\left( \rho {{V}_{z}} \right)=0\]
由于r与z无关,所以连续方程可写为
\(\frac{\partial }{\partial r}\left( -\frac{\rho }{{{\rho }^{*}}}{{V}_{r}}r \right)=\frac{\partial }{\partial z}\left( \frac{\rho }{{{\rho }^{*}}}{{V}_{z}}r \right)\) (8.52)
式(8.52)是ψ存在的充要条件,因此有
\[d\psi =\frac{1}{{{\rho }^{*}}}\left( \rho r{{V}_{z}}dr-\rho r{{V}_{r}}dz \right)\]
或写成 \(\psi \left( r,z \right)=\int{\frac{1}{{{\rho }^{*}}}\left( \rho r{{V}_{z}}dr-\rho r{{V}_{r}}dz \right)}\) (8.53)
对不可压缩二维流动,不管流动是否为定常,其连续方程为∂Vx/∂x=(-Vy)∂/∂y ,该方程也是流函数存在的充要条件。因此有
dψ=-Vydx+Vxdy
\(\psi \left( x,y,t \right)=\int{\left( -{{V}_{y}}dx+{{V}_{x}}dy \right)}\) (8.54)
说明:
(1)ψ的定义来自连续方程,因此一切平面流动,不管流动是否有旋,不论是无黏性流体还是黏性流体,只要满足连续方程,都存在流函数。但是,只有无旋流动才存在势函数。因此,对于平面流动,流函数具有更普遍的意义,它是研究平面流动的有力工具。
(2)对于可压缩流体,流函数存在的充要条件不仅要求流动是二维的,而且还要求流动是定常的。因为对于三维或非定常流动,连续方程无法满足存在流函数的充要条件,所以在可压流动中,只有二维定常流动存在流函数。
(3)对于不可压缩流体,只要流动是二维的,就一定存在流函数,不要求流动是否定常。
(4)对于非定常不可压流动,流函数是时间的函数。所以同一流场不同瞬间的流函数不相同。
下面分析流函数的性质。
1.ψ与V的关系
根据流函数的定义式(8.51a),对比流函数的全微分
\[d\psi \left( x,y \right)=\frac{\partial \psi }{\partial x}dx+\frac{\partial \psi }{\partial y}dy\]
可得 \(\frac{\partial \psi }{\partial x}=-\frac{\rho }{{{\rho }^{*}}}{{V}_{y}},\frac{\partial \psi }{\partial y}=\frac{\rho }{{{\rho }^{*}}}{{V}_{x}}\) (8.55)
对于不可压缩流动,ρ=ρ*保持不变,可得流函数与速度的关系为
\(\frac{\partial \psi }{\partial x}=-{{V}_{y}},\frac{\partial \psi }{\partial y}={{V}_{x}}\) (8.56)
同理,对于轴对称流动,有
\(\frac{\partial \psi }{\partial r}=\frac{\rho }{{{\rho }^{*}}}r{{V}_{z}},\frac{\partial \psi }{\partial z}=-\frac{\rho }{{{\rho }^{*}}}r{{V}_{r}}\) (8.57)
由以上流函数与速度的关系可以看出,对于二维流动,只要求出流场中的流函数,即可求出速度分布。
2.等流函数线就是流线
在二维流动中,ψ=C的线与流线方程一致。证明如下。
令ψ=C,则dψ=∂ψdx/∂x+∂ψdy/∂y=0,将式(8.55)或式(8.56)代入后,得
\(\frac{dx}{dy}=-\frac{\frac{\partial \psi }{\partial y}}{\frac{\partial \psi }{\partial x}}=\frac{{{V}_{x}}}{{{V}_{y}}}\) (8.58)
式(8.58)与前面介绍的流线方程dx/Vx=dy/Vy完全一致,即证明了二维流动中流函数等于常数的线为流线。
注意,ψ存在的条件是二维流动,而流线在二维和三维流动中都存在。
3.等流函数线与等势函数线正交
流函数和势函数同时存在的流场是二维定常无旋流动。在这种流动中,等流函数线与等势函数线正交。证明如下。
令势函数和流函数分别为常数,即φ=C1,ψ=C2,则沿等流数线有
\(d\psi =\frac{\rho }{{{\rho }^{*}}}\left( -{{V}_{y}}dx+{{V}_{x}}dy \right)=0\) (a)
沿等势函数线有
\(d\varphi ={{V}_{x}}dx+{{V}_{y}}dy=0\) (b)
由式(a)、式(b)可解得
\[{{\left( \frac{dy}{dx} \right)}_{\psi ={{C}_{2}}}}=\frac{{{V}_{y}}}{{{V}_{x}}},{{\left( \frac{dy}{dx} \right)}_{\varphi ={{C}_{1}}}}=-\frac{{{V}_{x}}}{{{V}_{y}}}\]
两式相乘,得 \({{\left( \frac{dy}{dx} \right)}_{\psi ={{C}_{2}}}}\times {{\left( \frac{dy}{dx} \right)}_{\varphi ={{C}_{1}}}}=-1\)
上式证明了等流函数线与等势函数线相互垂直,即等流函数线与等势线构成了正交网格。
4.流函数与流量之间的关系
可以证明,流场中任意两点的流函数之差正比于通过两点间任意曲线的质量流量。
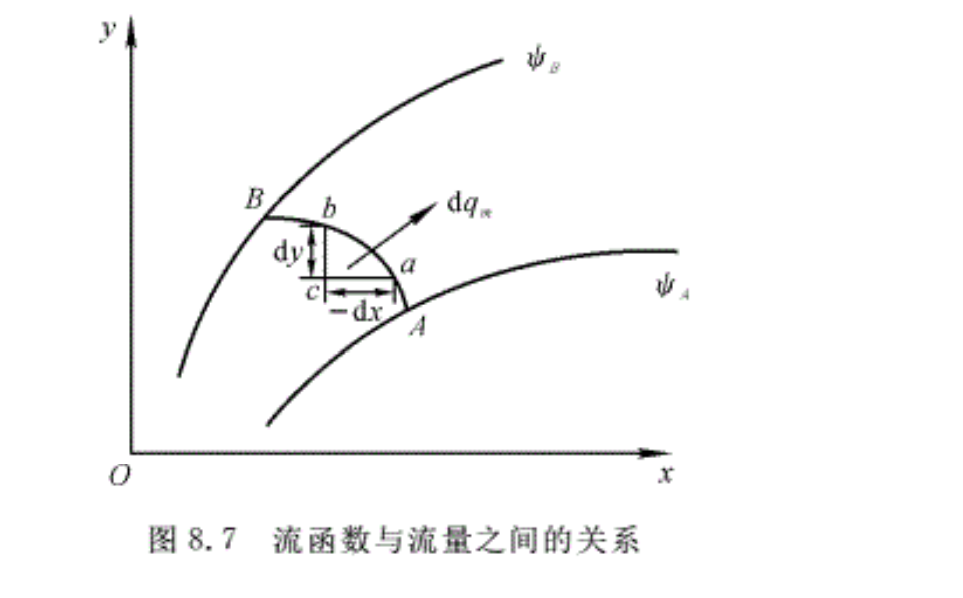
在如图8.7所示的二维流场中,取两条ψA和ψB的等流函数线,过这两条等值线做任意曲线 AB,计算通过该曲线的流量。在此曲线上取一微元段dl,某瞬时通过该微元段dl上的流量为
\[d{{q}_{m}}=-\rho {{V}_{y}}dx+\rho {{V}_{x}}dy\]
将流函数与速度之间的关系代入上式,得
\[d{{q}_{m}}={{\rho }^{*}}\left( \frac{\partial \psi }{\partial x}dx+\frac{\partial \psi }{\partial y}dy \right)={{\rho }^{*}}d\psi \]
积分得
\({{q}_{m}}=\int_{A}^{B}{{{\rho }^{*}}d\psi ={{\rho }^{*}}\left( {{\psi }_{B}}-{{\psi }_{A}} \right)}\) (8.59)
由式(8.59)可以看出,对于可压二维定常流动,任意两点的流函数之差正比于通过两点间任意曲线的质量流量。同样可以证明,对于不可压二维定常流动,任意两点的流函数之差等于通过两点间任意曲线的容积流量。
二、流函数方程
对于理想可压缩流体定常二维绝热流动,可以将葛罗米柯运动方程表示成流函数方程,从而可以通过求解流数方程得到流函数,再根据流函数与速度的关系求出速度分布。为了便于导出流函数方程,假设为无旋流动,这样可以把葛罗米柯运动方程、无旋条件和声速方程合并后,导出可压流动的流数方程。
在二维可压定常无旋流动中,葛罗米柯运动方程(忽略质量力)可以表示为
\[\nabla \frac{{{V}^{2}}}{2}=-\frac{1}{\rho }\nabla p\]
与成全微分的形式,并将速度与流函数的关系代入,得
\(dp=-\rho \frac{{{V}^{2}}}{2}=-\rho \frac{V_{x}^{2}+V_{y}^{2}}{2}=-\frac{\rho }{2}d\left[ {{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\left( \psi _{x}^{2}+\psi _{y}^{2} \right) \right]\) (a)
根据二维平面流动的无旋条件∂Vx/∂y=∂Vy/∂x,用ψ表示为
\(\frac{\partial }{\partial y}\left( \frac{{{\rho }^{*}}}{\rho }\frac{\partial \psi }{\partial y} \right)=\frac{\partial }{\partial x}\left( -\frac{{{\rho }^{*}}}{\rho }\frac{\partial \psi }{\partial x} \right)\) (b)
展开并整理,得
\(\rho \left( {{\psi }_{xx}}+{{\psi }_{yy}} \right)={{\psi }_{x}}\frac{\partial \rho }{\partial x}+{{\psi }_{y}}\frac{\partial \rho }{\partial y}\) (c)
无黏性可压缩流体绝热流动是等熵流动,其声速方程为
c²=dp/dρ
即将式(a)代入上式,得
\[d\rho =\frac{dp}{{{c}^{2}}}=-\frac{\rho }{2{{c}^{2}}}d\left[ {{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\left( \psi _{x}^{2}+\psi _{y}^{2} \right) \right]\]
展开上式,有
\[d\rho =-\frac{\rho }{{{c}^{2}}}\left[ {{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\left( {{\psi }_{x}}d{{\psi }_{x}}+{{\psi }_{y}}d{{\psi }_{y}} \right)-\left( \psi _{x}^{2}+\psi _{y}^{2} \right){{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\frac{d\rho }{\rho } \right]\]
整理后,得
\[d\rho =\frac{-\frac{\rho }{{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\left( {{\psi }_{x}}{{\psi }_{xx}}+{{\psi }_{y}}{{\psi }_{xy}} \right)}{1-\frac{1}{{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\left( \psi _{x}^{2}+\psi _{y}^{2} \right)}dx+\frac{-\frac{\rho }{{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\left( {{\psi }_{x}}{{\psi }_{xy}}+{{\psi }_{y}}{{\psi }_{yy}} \right)}{1-\frac{1}{{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\left( \psi _{x}^{2}+\psi _{y}^{2} \right)}dy\]
由此得
\[\begin{align}& \frac{\partial \rho }{\partial x}=\frac{-\frac{\rho }{{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\left( {{\psi }_{x}}{{\psi }_{xx}}+{{\psi }_{y}}{{\psi }_{xy}} \right)}{1-\frac{1}{{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\left( \psi _{x}^{2}+\psi _{y}^{2} \right)} \\& \frac{\partial \rho }{\partial y}=\frac{-\frac{\rho }{{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\left( {{\psi }_{x}}{{\psi }_{xy}}+{{\psi }_{y}}{{\psi }_{yy}} \right)}{1-\frac{1}{{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\left( \psi _{x}^{2}+\psi _{y}^{2} \right)} \\\end{align}\]
将以上两式代入式(c),并经过整理,得
\(\left[ 1-\frac{\psi _{y}^{2}}{{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}} \right]{{\psi }_{xx}}+\left[ 1-\frac{\psi _{x}^{2}}{{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}} \right]{{\psi }_{yy}}+2{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\frac{{{\psi }_{x}}{{\psi }_{y}}}{{{c}^{2}}}{{\psi }_{xy}}=0\) (8.60)
式(8.60)为理想可压2-D定常无旋绝热流动的流函数方程。
对于轴对称无旋定常绝热流动,用流函数表示的运动微分方程为
\(\left[ 1-\frac{\psi _{z}^{2}}{{{r}^{2}}{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}} \right]{{\psi }_{rr}}+\left[ 1-\frac{\psi _{r}^{2}}{{{r}^{2}}{{c}^{2}}}{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}} \right]{{\psi }_{zz}}+2{{\left( \frac{{{\rho }^{*}}}{\rho } \right)}^{2}}\frac{{{\psi }_{r}}{{\psi }_{z}}}{{{r}^{2}}{{c}^{2}}}{{\psi }_{zr}}-\frac{{{\psi }_{r}}}{r}=0\) (8.61)
式(8.60)和式(8.61)均为二阶非线性偏微分方程,可通过数值计算求解。
不可压流,c→∞,则流函数方程简化为
\({{\psi }_{xx}}+{{\psi }_{yy}}=0\) (8.62)
式(8.62)为拉普拉斯方程,且为线性方程。
说明:
(1)对二维有旋流动也存在流函数ψ,也可导出更为复杂的有旋流动的流函数方程。因为有旋流动不存在势函数φ,所以常用流函数ψ方程求解。
(2)对无旋的二维定常可压流动,ψ,φ同时存在,但ψ方程复杂,故无旋流动常用势函数方程求解。
8.6 微分形式的能量方程
8.6.1 一般形式的能量方程
微分形式的能量方程可以通过对流场中体积为δv=dxdydz的微元控制体,运用热力学第一定律得到,即
Q ̇=dE/dt+W ̇ (8.63)
式中 : Q ̇——单位时间内外界传给系统的热量;
dE/dt——系统所储存的总能量的增加率;
W ̇——系统对外界输出的功率。
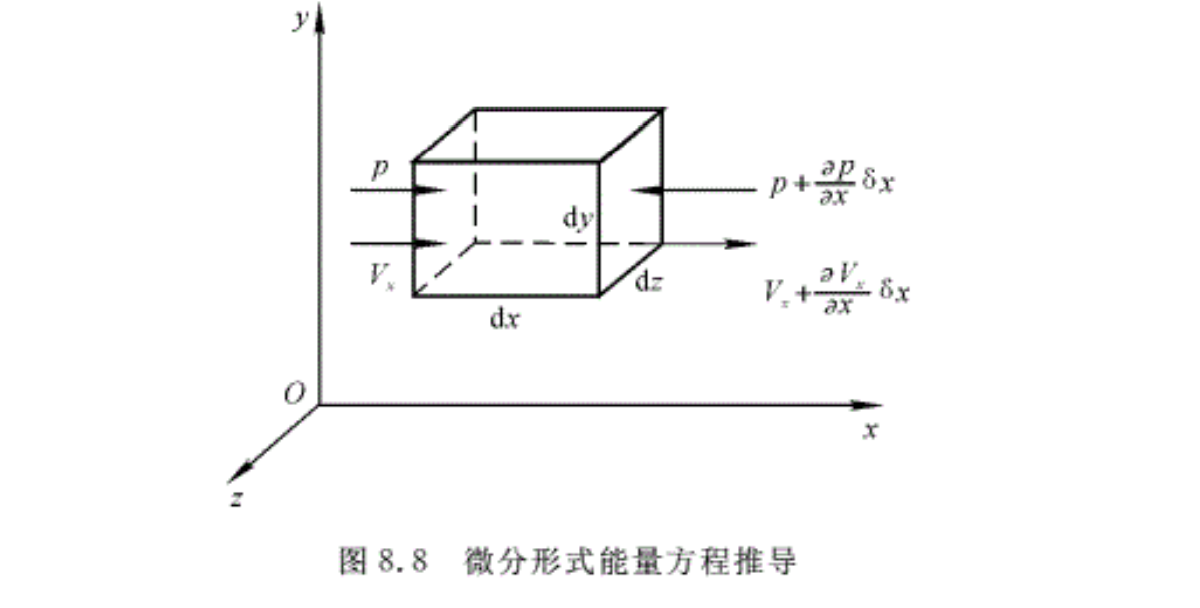
对如图8.8所示的微元控制体,设单位时间内加给单位质量流体的热量为 ,则流体微团在单位时间内所吸入的热量为
Q ̇=ρδv+q ̇ (a)
流体微团所具有的储存能在运动过程中的变化率为
\[\frac{dE}{dt}=\frac{d}{dt}\left[ \rho \delta v\left( u+\frac{{{V}^{2}}}{2} \right) \right]\]
根据质量守恒原理,流体微团的质量在运动过程中保持不变,故上式可写成
\(\frac{dE}{dt}=\rho \delta v\frac{d}{dt}\left( u+\frac{{{V}^{2}}}{2} \right)\) (b)
作用在流体微团上的质量力为Rρδv,设质量力有势,且势数为U,则质量力可写成 R=▽U,因此,作用在流体微团上质量力的功率为
–▽U • Vρδv=\(\left( -\frac{dU}{dt}+\frac{\partial U}{\partial t} \right)\rho \delta v\)
设势函数U的当地变化率为零,则
-▽U • Vρδv=-dUρδv/dt
流体微团克服x方向压力而对外的功率为
\[\left( p+\frac{\partial p}{\partial x}dx \right)dydz\left( {{V}_{x}}+\frac{\partial {{V}_{x}}}{\partial x}dx \right)-\left( pdydz \right){{V}_{x}}\]
展开并略去高阶微量,则有
\[\frac{\partial }{\partial x}\left( p{{V}_{x}} \right)\delta v\]
同理,可得y方向和z方向的压力对外的功率,则流体微团克服三个方向的压力对外的功率为
\[\left[ \frac{\partial \left( p{{V}_{x}} \right)}{\partial x}+\frac{\partial \left( p{{V}_{y}} \right)}{\partial y}+\frac{\partial \left( p{{V}_{z}} \right)}{\partial z} \right]\delta v\]
流体微团对外界的总功率为
W ̇=\(-\frac{dU}{dt}\rho \delta v+\left[ \frac{\partial \left( p{{V}_{x}} \right)}{\partial x}+\frac{\partial \left( p{{V}_{y}} \right)}{\partial y}+\frac{\partial \left( p{{V}_{z}} \right)}{\partial z} \right]\delta v\) (c)
将式(a)、式(b)、式(c)代入式(8.63),并经过整理后,得
q ̇=\(\frac{d}{dt}\left( u+\frac{{{V}^{2}}}{2} \right)-\frac{dU}{dt}+\frac{1}{\rho }\left[ \frac{\partial \left( p{{V}_{x}} \right)}{\partial x}+\frac{\partial \left( p{{V}_{y}} \right)}{\partial y}+\frac{\partial \left( p{{V}_{z}} \right)}{\partial z} \right]\)
展开上式右端的第三项,并应用连续方程和随流导数的表达式,经整理和化简,得
q ̇=\(\frac{d}{dt}\left( u+\frac{p}{\rho }+\frac{{{V}^{2}}}{2}-U \right)-\frac{1}{\rho }\frac{\partial p}{\partial t}\) (8.64)
式(8.64)为微分形式的能量方程。由式(8.64)可知,在非定常流动中,即使理想流体与外界没有热量交换,流体所具有的总能量也将会发生变化。
如果质量力仅有重力,则微分形式的能量方程为
q ̇=\(\frac{d}{dt}\left( u+\frac{p}{\rho }+\frac{{{V}^{2}}}{2}+gz \right)-\frac{1}{\rho }\frac{\partial p}{\partial t}\) (8.65)
对于气体,忽略质量力势能,则能量方程可以简化为
q ̇=\(\frac{d}{dt}\left( u+\frac{p}{\rho }+\frac{{{V}^{2}}}{2} \right)-\frac{1}{\rho }\frac{\partial p}{\partial t}\) (8.66)
或引进焓的概念,则有
q ̇=\(\frac{d}{dt}\left( h+\frac{{{V}^{2}}}{2} \right)-\frac{1}{\rho }\frac{\partial p}{\partial t}\) (8.67)
在定常流动的条件下,对于理想流体的绝热流动,由式(8. 65)得
\[\frac{d}{dt}\left( u+\frac{p}{\rho }+\frac{{{V}^{2}}}{2}+gz \right)=0\]
上式说明,在定常绝热(绝能)流动中,单位质量流体具有的总能量沿流线保持不变,即
\(u+\frac{p}{\rho }+\frac{{{V}^{2}}}{2}+gz=C\) (8.68)
式(8.68)与一维定常绝能流动的能量方程的形式一致。
8.6.2 其他形式的能量方程
能量方程还可以写成其他形式。将速度点乘欧拉方程的两边,得
V • dV/dt=V • R–V▽p/ρ
设质量力有势,即R=▽U,代入上式后并利用随流导数公式,将上式变为
\[\frac{d}{dt}\left( \frac{{{V}^{2}}}{2} \right)=\frac{dU}{dt}-\frac{\partial U}{\partial t}-\frac{1}{\rho }\left( \frac{dp}{dt}-\frac{\partial p}{\partial t} \right)\]
一般情况下∂U/∂t=0,由上式可解得
\[\frac{1}{\rho }\frac{\partial p}{\partial t}=\frac{d}{dt}\left( \frac{{{V}^{2}}}{2} \right)-\frac{dU}{dt}+\frac{1}{\rho }\frac{dp}{dt}\]
将上式代入微分形式的能量方程式(8.64),得
q ̇=\(\frac{d}{dt}\left( u+\frac{p}{\rho } \right)-\frac{1}{\rho }\frac{dp}{dt}\) (8.69)
或写成
q ̇=\(\frac{dh}{dt}-\frac{1}{\rho }\frac{dp}{dt}\) (8.70)
式(8.70)称为另一种形式的能量方程。
对于不可压流动,由式(8.69),有
q ̇=du/dt (8.71)
对于定比热的完全气体,有
q ̇=\({{c}_{v}}\frac{dT}{dt}\) (8.72)
式中,cv为比定容热容。
从式(8.71)和式(8.72)可以看出,在不可压流动中,热交换只会引起温度发生变化,而不会引起其他流动参数(如V,p)发生变化。速度和压强的变化可以不与能量方程耦合求解,只需要求解连续方程和运动方程即可。
8.7 可压缩理想流体动力学基本方程组
可压缩理想流体动力学基本方程组由连续方程、运动方程、能量方程、状态方程组成。由于方程中的变量数目多于方程的个数,因此需要补充方程。通常补充的方程有熵方程和声速方程等作为辅助方程共7个方程。现直接写出形式,以便使用。
∂ρ/∂t+▽•(ρV)=0
R–▽p/ρ=∂V/∂t+(V • ▽)V
q ̇=\(\frac{d}{dt}\left( h+\frac{{{V}^{2}}}{2}-U \right)-\frac{1}{\rho }\frac{\partial p}{\partial t}\)
状态方程
T=T(p,ρ)
h=h(p,ρ)
熵方程
ds/dt≥q ̇/T
声速方程
▽ p = c² ▽ ρ
在上述7个动力学基本方程中,质量力一般是己知的,对于气体通常可以忽略不计;加热率q ̇或者略去不计,或者必须考虑时,可以根据傅里叶定律用温度梯度或其他参数来代替。这样7个动力学基本方程中包含7个未知数,即速度V、温度T、压强p、密度ρ、焓h、熵s、和声速c,方程数目与待求未知量数目相等,即方程组封闭。上述方程在给定的初始条件和边界条件下可以解出各物理量。
8.8 理想流体的初始条件与边界条件
一、初始条件
在初始时刻,方程组的解应该等于该时刻给定的数值。在数学上可以表示为
当t=to时,
\(\left. \begin{align}& V\left( x,y,z,{{t}_{0}} \right)={{V}_{0}}\left( x,y,z \right) \\& p\left( x,y,z,{{t}_{0}} \right)={{p}_{0}}\left( x,y,z \right) \\& \rho \left( x,y,z,{{t}_{0}} \right)={{\rho }_{0}}\left( x,y,z \right) \\& T\left( x,y,z,{{t}_{0}} \right)={{T}_{0}}\left( x,y,z \right) \\\end{align} \right\}\) (8.73)
式中,Vo(x,y,z),po(x,y,z),ρo(x,y,z),To(x,y,z)均为to时刻的己知函数。
二、边界条件
在运动流体的边界上,方程组的解所应满足的条件称为边界条件。边界条件随具体问題而定,一般来讲可能有以下几种情况:固体壁面(包括可渗透壁面)上的边界条件;不同流体的分界面(包括自由液面、气液界面、液液界面)上的边界条件;无限远或管道进出口处的边界条件等。
1.理想流体固体壁面上的边界条件
流体不会穿越固体壁面,但理想流体在固体壁面上可以产生滑动,在无分离的条件下,壁面上流体质点运动速度的法向分量Vn,w等于运动壁面在对应点处的法向分速度Vw,n。即
\[{{V}_{n,w}}={{V}_{w,n}}\]
对于静止固体壁面,有 Vn,w=0
2.无穷远边界条件
一般给出无穷远的边界条件有V∞、压强P∞、温度T∞和密度ρ∞。
3.进、出口边界条件
对于所有的流动进、出囗截面,应给出每时刻截面上速度、压力和温度的分布。对于流体绕流物体的问题,进、出口边界变成了无穷远边界,应给出无穷远边界条件。
4.自由表面的边界条件为
自由表面是指一种介质与另一种介质相接触的交界面。
自由表面的压强等于外界流体在交界面的压强,即
p=pa
8.9 凯尔文定理(汤姆逊定理)
一、流体线和流体周线
在介绍凯尔文定理之前,有必要先解释一下所谓“流体线”的概念。在流体力学中,“流体线”是指永远由同样的流体质点组成的线。它由无限多个流体质点所组成,流体线不仅随流体质点而移动,而且会改变形状,但组成流体线的流体质点仍然是原来的质点,它不会破损或被切割。如果流体线原来呈封闭形状,那么它始终是一条封闭周线,此时的流体线称为“流体周线”。
二、凯尔文定理(汤姆逊定理)
凯尔文定理可以叙述如下:在均质理想流体中,沿着一封闭流体周线的速度环量不随时间而变化,即速度环量的全导数为零,即
d∮C(V • dl)/dt=0
为了证明此定理,在流场中任取一流体周线C,沿此流体周线的速度环量为
Γ=∮C(V • dl)=∮C(Vxdx+Vydy+Vzdz) (8.74)
微分上式,得到
\[\frac{d\Gamma }{dt}=\frac{d}{dt}\oint_{C}{\left( {{V}_{x}}dx+{{V}_{y}}dy+{{V}_{z}}dz \right)}=\oint_{C}{\frac{d}{dt}\left( {{V}_{x}}dx+{{V}_{y}}dy+{{V}_{z}}dz \right)}\] (8.75)
根据微分概念,有
\[\left. \begin{align}& \frac{d}{dt}\left( {{V}_{x}}dx \right)={{V}_{x}}\left( \frac{d\left( dx \right)}{dt} \right)+\frac{d{{V}_{x}}}{dt}dx={{V}_{x}}d{{V}_{x}}+\frac{d{{V}_{x}}}{dt}dx \\& \frac{d}{dt}\left( {{V}_{y}}dy \right)={{V}_{y}}\left( \frac{d\left( dy \right)}{dt} \right)+\frac{d{{V}_{y}}}{dt}dy={{V}_{y}}d{{V}_{y}}+\frac{d{{V}_{y}}}{dt}dy \\& \frac{d}{dt}\left( {{V}_{z}}dz \right)={{V}_{z}}\left( \frac{d\left( dz \right)}{dt} \right)+\frac{d{{V}_{z}}}{dt}dz={{V}_{z}}d{{V}_{z}}+\frac{d{{V}_{z}}}{dt}dz \\\end{align} \right\}\] (a)
对于理想无黏性流体,上列各式等号右端的dVx/dt,dVy/dt,dVz/dt可以写为
\[\left. \begin{align}& X-\frac{1}{\rho }\frac{\partial p}{\partial x}=\frac{d{{V}_{x}}}{dt} \\& Y-\frac{1}{\rho }\frac{\partial p}{\partial y}=\frac{d{{V}_{y}}}{dt} \\& Z-\frac{1}{\rho }\frac{\partial p}{\partial z}=\frac{d{{V}_{z}}}{dt} \\\end{align} \right\}\] (b)
将式(a)、式(b)代入式(8.75),得
\[\begin{align}& \frac{d\Gamma }{dt}=\oint_{C}{\left[ \left( {{V}_{x}}d{{V}_{x}}+{{V}_{y}}d{{V}_{y}}+{{V}_{z}}d{{V}_{z}} \right)+\left( Xdx+Ydy+Zdz \right)-\frac{1}{\rho }\left( \frac{\partial p}{\partial x}dx+\frac{\partial p}{\partial y}dy+\frac{\partial p}{\partial z}dz \right) \right]}= \\& \oint_{C}{\left[ d\left( \frac{V_{x}^{2}+V_{y}^{2}+V_{z}^{2}}{2} \right)+dU-\frac{1}{\rho }dp \right]}=\oint_{C}{\left[ d\left( \frac{{{V}^{2}}}{2} \right)+dU-\frac{1}{\rho }dp \right]} \\\end{align}\]
如果流体质量力有势,流体的密度只是压强的函数(正压流体),上述积分起点与终点重合,而式中的函数V,U,p都是单值的,那么上述积分必然等于零,即
dΓ/dt =d∮C(Vxdx+Vydy+Vzdz)/dt= d∮C(V • dl)/dt=0
或者 Γ=∮C(Vxdx+Vydy+Vzdz)=常数
由此证明了凯尔文定理。即在无黏性质量力有势的正压流体中,沿封闭流体周线的速度环量不随时间而变化。
根据凯尔文定理,可以看出,如果运动从静止状态开始,那么在运动开始之前,对于每一条封闭流体周线的速度环量一定等于零,所以那条流体周线的速度环量将永远等于零
在无黏性的正压流体中,如果流动原来是无旋的,则沿任何流体周线的速度环量均为零;如果流动原来是有旋的,那么该流动中的旋涡就始终存在。在无黏性的正压流体中,旋涡不会自生自灭。
问题的实质在于理想无黏性流体不能承受任何剪切应力。也就是说,理想流体既没有能力使流体产生剪切变形,也无力阻止己经旋转的流体消除转动。因此,已经旋转的流体,无法使其停止旋转;原来无旋的流体也不可能使其转动起来。
这里必须指出的是,在凯尔文定理中的封闭周线是流体周线而不是空间固定周线,对于空间固定的封闭曲线,其速度环量一般是会随时间而变化的,只有在定常流的情况下,空间固定的封闭曲线速度环量才不会随时间而变化。
小结
本章主要讨论了理想流体多维流动的基础知识和基本方程。
(1)讨论了有旋流动和无旋流动的定义及判别方法,介绍了速度环量的概念及其与旋涡强度的关系。引进了无旋流动的条件及速度势的概念。
(2)从物理概念出发,导出了微分形式的连续方程、动量方程和能量方程。
(3)微分形式动量方程的其他形式有葛罗米柯运动方程,突出了旋转角速度(速度旋度)的表示形式;克罗克运动方程,突出了熵梯度、总焓梯度与速度旋度间的关系;速度势方程则表示在无旋的条件下,可以求解速度势方程,而在二维流动中,可以求解流函数方程。
(4)介绍了流函数存在的条件,流函数的性质。
(5)介绍了理想流体多维流动的基本方程组及其初始条件和边界条件。从理论上讲,有可能在某些给定的初始条件和边界条件下,通过解方程组,求出流场中的诸物理量。
思考与练习题
8.1 思考判别流场无旋的方法有哪几种。
8.2 流函数和势函数存在的条件是什么?在什么流动中同时存在流函数和势函数?
8.3 已知速度分布为Vx=x+ t,Vy=-y+t,求其速度势函数。
8.4 有一平面的无旋流场,速度势数为
\[\varphi =\frac{{{x}^{3}}}{3}-{{x}^{2}}-x{{y}^{2}}+{{y}^{2}}\]
求过点(2,-1)沿迹线x²y=-4方向上的速度分量。
8.5 一流动的流线为一族同心圆,其速度在每条流线上保持不变,且Vθ=k/r,k为常数。问这种流动是否存在速度势?
8.6 有一平面流动,其速度分布为
\[V={{V}_{\infty }}\left( 1-\frac{1}{{{r}^{2}}} \right)\cos \theta {{i}_{r}}+\left[ \frac{1}{r}-{{V}_{\infty }}\left( 1+\frac{1}{{{r}^{2}}} \right)\sin \theta \right]{{i}_{\theta }}\]
试求包含r=1的任一封闭曲线的速度环量。
8.7 一平面无旋流动,其速度势数为φ=-θ/2π ,试分别求包围原点和不包围原点的任意封闭曲线的速度环量。
8.8 一均匀流动的速度为V∞,试分别计算绕矩形和圆形封闭曲线的速度环量。
8.9 己知速度分布为Vx=x,Vy=y²,Vz=z,该流动是否为不可压流动?
8.10 可压缩流体做二维平面流动,x方向的速度分量为Vx=Ax(A为常数),求y方向的速度分量;如不可压缩流体做平面辐射流动,速度为Vr=f(r),Vθ=0,试求Vr的表达式。
8.11 有一不可压缩流体,y方向的速度分量为Vy=ax+by²,z方向的速度分量为零,求 x方向的速度分量。已知a,b为常数,且当x=0时,Vx=0。
8.12 判别下面的速度场是否属于不可压流动:
Vr=2rsinθ, Vθ=rcos²θ
8.13 无黏性不可压缩流体在水平面环路通道内作平面流动,设Vθ不随θ变化。求:
(1)压强随Vθ和r的变化关系p=f(Vθ,r);
(2)己知Vθ=1,Vθ=r,Vθ=1/r²,求压强随r的变化关系p=f(r)。
8.14 无黏性不可压缩流体绕直角壁面流动,其速度势函数为φ=x²+y²。设静止时的压强为po,试分析壁面处的压强分布。
8.15 己知不可压缩流体流动的速度分布为V=6(x+y²)i+(2y+z³)j+(x+y+z)k。试问这种流动是否连续?
8.16 有一个二维不可压流动,其速度分量为Vx=2x,Vy =-6x-2y。试问这种流动是否连续?若连续,求流函数。
8.17 一个三维不可压流场,己知速度分布为Vx=x²-y²z³,Vy=-(xy+yz+zx)。求z方向分速度的表达式。