NASA-工程中的经验教训

vi 绪 论
- 0-1 NASA 项目
- 0-2 经验教训的基础和应用
- 0-3 经验教训准则列表
- 0-4 各个准则及其相应启示的列表
- 0-5 对经验教训准则的讨论
准则I:系统的成功取决于人们的创造力、判断力和决策能力
启示1:人是工程成功的主要资源
- 1.1 启示1的案例
- 1.2 启示1的重要经验
启示2:人的技能是获取成功产品的必备条件
- 2.1 个人和组织成长的特征
- 2.2 启示2的重要经验
准则II:航天系统是具有挑战性的高性能系统
启示3:高性能需求导致高能量密度和高敏感性
- 3.1 启示3的重要经验:
准则III:任何事物都是一个系统(整体)
启示4:系统工程和技术集成是项目成功的关键
- 4.1 实例:
- 4.2 启示4的重要经验
启示5:风险管理
- 5.1 风险概述
- 5.2 实例
- 5.3 启示5的重要经验
启示6:所有的设计过程都充满矛盾,平衡无处不在
6.1 实例
6.2 启示6的重要经验
准则IV:系统遵循着物理规律
启示7:问题的物理本质为最高主宰
- 7.1 实例
- 7.2 启示7传递的重要信息
启示8:工程是一个逻辑思维过程
- 8.1 实例
- 8.2 启示8的重要经验:
启示9:数学是通用的!
启示9的重要经验
启示10:运载火箭的设计关键
- 10.1 运载火箭设计基本要素实例:
- 10.2 启示10的重要经验
准则V:健壮性设计基于我们对敏感性、不确定性和裕度的理解
启示11:健壮性
- 11.1 健壮性设计的实例:
- 11.2 启示11的重要经验:
启示12:理解敏感性和不确定性是必须的
- 12.1 敏感性和不确定性实例:
- 12.2 启示12的重要经验:
启示13:项目裕度必须足够大
- 13.1 裕度实例:
- 13.2 启示13的重要经验:
准则VI:项目的成功取决于对生命周期诸多因素的考量
启示14:设计空间受制于产品在生命周期内的定位
- 14.1 设计空间的实例:
- 14.2 从启示14得到的关键信息:
启示15:方案选择和设计流程
- 15.1 方案选择和设计流程的实例
- 15.2 从启示15得到的关键信息:
启示16:需求驱动设计
- 16.1 实例:
- 16.2 从启示16得到的关键信息:
启示17:针对属性和成本的设计
- 17.1 实例:
- 17.2 从启示l7得到关键信息:
准则VII:试验和验证在研发中至关重要
启示18:答案就在硬件及其数据里
- 18.1 实例:
- 18.2 从启示18得到的关键信息:
启示19:现在试验或将来试验
- 19.1 例子:
- 19.2 从启示19得到的关键信息:
启示20:独立分析、试验和设计是成功的关键
- 20.1 例子:
- 20.2 从启示20得到的关键信息:
启示21:所有的分析和试验都有局限性
- 21.1 例子:
- 21.2 从启示21得到的关键信息:
启示22:缩比是个关键问题
- 22.1 例子:
- 22.2 从启示22得到的关键信息:
准则VIII:必须鼓励勇于预想和揭示问题的行为
启示23:批判性思考 .
- 23.1 例子-维纳尔·冯·布劳恩-土星I试验 ..
- 23.2 从启示23得到的关键信息:
启示24:更改无小事!
- 24.1 例子:
- 24.2 从启示24得到的关键信息:
启示25:预期那些意想不到的情况
- 25.1 例子-外贮箱拱顶上的啄木鸟
- 25.2 从启示25得到的关键信息:
准则IX:领导是基础 .
启示26:表里如一 .
- 26.1 实例-“你必须用自己的方法去做,别按照我的方法。
- 26.2 从启示26得到的关键信息: .
启示27:高瞻远瞩
- 27.1 实例-筑起壁垒
- 27.2 从启示27得到的关键信息:
总 结
202 经验教训准则 .
绪 论
本报告是 James C. Blair、Robert S. Ryan 和 Luke Schutzenhofer 3 人 55 年来在工程中
积累的经验教训的汇编。这些课程是马歇尔航天中心教授的经验教训课程的基础。这些经验教训都来自于 NASA 航天计划,其特点都来源于项目经验中具有共性的教训,而这些经验教训进一步提炼形成相关的重要准则,可应用于未来项目。
各项重要准则及与其相关的启示作为内容被纳入了讨论范畴。在各个项目的经验教训中也列出了依据项目问题而得出的一些小教训。之后对每个问题都进行了说明和讨论,并根据经验教训得出了结论。本手册的目的就是提供基于过去航天经验所获得的教训而提炼出的准则,以此来帮助我们在未来的项目能够取得更大的成就,而且这些准则也将用于航天系统的设计中。所经历的问题能够表明工程研究过程中的一些本质问题,这些问题是工程设计、制造及使用中一个个微妙典型的案例。
如何避免过去的错误以及如何培养员工的工程素质,是我们在航空航天工程中所面临的的,也是必须面对的问题。那些忘记过去经验教训的人,注定要重蹈覆辙。冯·布劳恩博士说过,应急措施的失败就是由于他们相信“九个怀孕的女人能在一个月内生出孩子”的理论(中国俗语说,女人生孩子要 10 月怀胎)。另外,发生失败也是由于我们忘记了基本物理定律并在设计中试图绕过它。
NASA 和国防部在航天系统工程中有着许多非常成功的伟大成就。然而,为了克服重力,在恶劣环境下生存并达到预定目标,他们将技术推动到了极致。这样就必须承担相应的风险,同时,自然也会出现问题。
太空探索中对高效能密度及高效率的需求,使系统性能对系统参数及其不确定性、对制造能力的敏感性等有着前所未有的挑战,其中就包含了很大的风险及潜在的问题。在过去六十年中,在航天系统中所得到的经验教训受到了广泛的关注。NASA 总共在三次任务中失去了宇航员,第一次是阿波罗任务期间,在 KSC 训练舱着火事件,第二次是挑战者号航天飞机的爆炸机毁人亡,第三次是哥伦比亚航天飞机及成员的失事。还有其它的失误导致任务失败,另外还有众多其他问题对项目产生极大的影响。国防部和商业领域的太空探索中也有着类似的经验教训。
本手册的目的是回顾 NASA 项目,挖掘经验教训,并从中提炼可应用于未来项目的基本准则。虽然本手册仅包含作者工作中的问题和方法作为示例,但其中的启示和准则是通用的,可以应用于其他技术和组织领域。本手册以重申这些准则为结尾。
0-1 NASA 项目
开始,我们为陆军导弹司令部工作,研究“红石”和“木星”导弹及其后续型号,
而这些型号最终都用于了太空探索项目中。土星 I 最初是陆军的项目后来由 NASA接管。土星 I 是一个运载器,使用当时的硬件及制造工艺,以得到早期的重型发射能力。土星 I 一级采用与木星相同的制造工艺及芯级贮箱的直径,助推采用与红石相同的直径和制造工艺。芯 I 级发动机为洛克达因的 H-1,上面级发动机为普惠的 RL-10 发动机。在成功发射土星 I 火箭之后,我们被调到 1960 年新成立的 NASA 工作,参与 NASA 的所有计划,包括具有潜力的新型但未真正实施的项目或者在完成前就取消的项目。图 I-1 显示了部分项目清单,图 I-2~图 I-4 包括了一些项目的图片。值得注意的是,图 I-1 还包含了苏联火箭和国防部火箭的草图。对这些系统我们只做了很少工作。如果读者想进一步探讨各种项目及其特点,可查看参考文献中提供的详细资料。
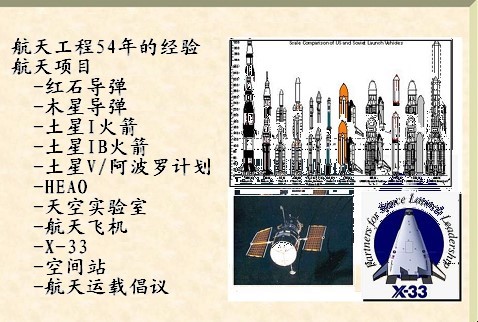
图 I-1 形成课程基础的示例项目
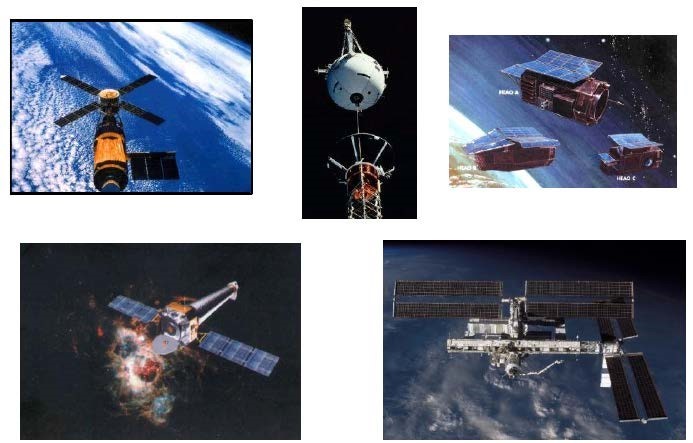
图 I-2 形成课程基础的示例项目(续)
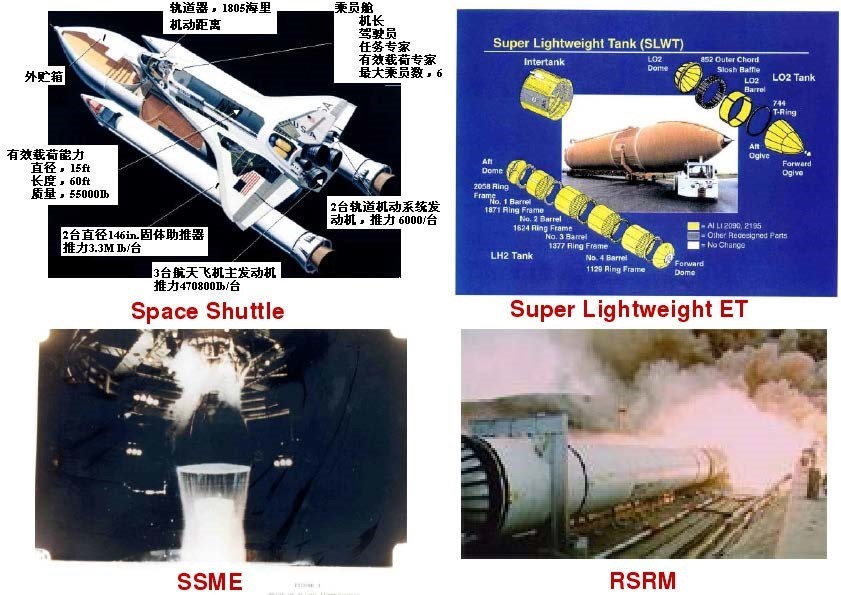
图 I-3 形成课程基础的示例项目(续)

图 I-4 形成基础课程的示例项目(续)
挖掘和描述“所学到的教训”的过程,首先要从列出各个项目中总结的经验与遇到的问题开始。我们在这里仅仅描述作者所经历的项目及遇到的问题。在我们所收集的课程中还有一些是其他人拓展出来的,对于读者来说这也是很好的资源。接下来,我们将案例分成综合类和技术类两组,而在这两组中又进行了更加细致的分类(如图 I-5)。在这些子类中,各个案例根据不同经验教训进行归类。最顶层的设计及管理准则都是从这些经验教训中总结归纳出来的。
0-2 经验教训的基础和应用
- 我们的经验大多来自于技术集成和飞行力学领域,这些经验和归纳出来的准则通常适用于所有工程。
- 综合类的经验教训和准则,其支撑实例不限于作者的经验,其它学科也是可以借鉴的。
- 另外,除了这些通用教训,也有特定学科和特定门类的教训没有在该课程中叙述。这些可以通过其它资源途径获得,如 NASA 及其各中心经验教训数据库。教训数据库,Lunar 电子图书馆(文献部门)等。
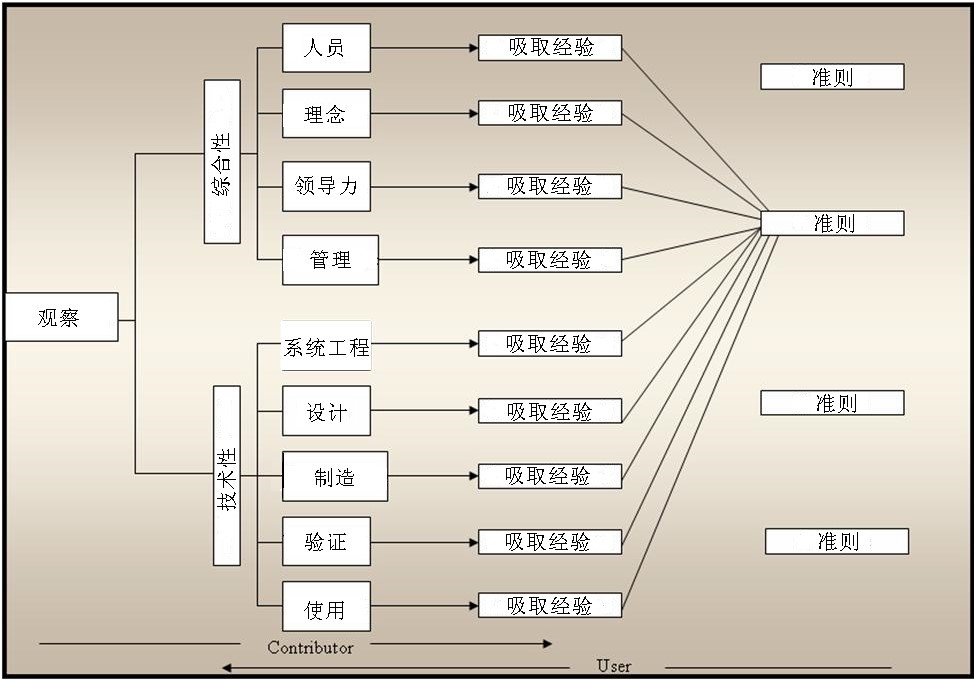
图 I-5 吸取经验教训的过程图
顶层准则及其推论在下文列出。准则 I 论述人的重要性。我们所做的大部分事情取决于我们人员的判断和决策能力,一个组织中最重要的资源就是人员。事实上,任何设施都是人类个体及思维的辅助工具:准则 II 认为将系统送入太空中的挑战是驱动任何事情发展的源动力,包括所有分析、试验以及项目设计:准则 III 认为系统中所有部件间都存在着交互影响。交流及信息是理解这个系统在项目或计划方面的关键所在;准则 IV 是告诉我们任何东西都遵守着物理学定律。从广义上讲,这也包括财政的基本原则,组织等等;准则 V 认为健壮性是必须的,而且需要知道系统的敏感性、不确定性、风险性以及要考虑到余量;准则 VI 告诉我们在设计产品时,需要考虑到产品的全生命周期,而不是阶段性的产品;准则 VII 告诉我们试验及验证在产品研发中至关重要;准则 VIII 认为批判性思维是必要的,而且我们需要创造性的倾听和思考并且能够批判性地提出问题。准则 IX 又是与人相关的,强调了领导能力的重要性。我们将在后面的内容中对各个准则进行详细介绍。
0-3 经验教训准则列表
I.系统的成功取决于人们的创造力、判断力和决策能力
- 人是我们最重要的资源
II.航天系统是具有挑战性的高性能系统
- 高能量、高能量密度
- 由此,导致高敏感性
III.任何事物都是一个系统(整体)
- 我们按照分解和再集成来开展设计工作
- 理解接口和相互关系至关重要
- 需要广泛的交流
IV.系统遵循着物理规律
- 不能忽略现实情况
- 要看到硬件和软件的真实性能
V.健壮设计基于我们对系统的敏感性、不确定性和裕度的理解
- 必须考虑敏感性、不确定性、裕度、风险
- 目标是健壮性
VI.项目的成功取决于对生命周期诸多因素的考量
- 项目的约束性条件导致非最优设计
- 需求会以一种意想不到的方式来驱动设计
- 工程研制初期对设计的影响最大
- 设计须考虑所涵盖生命周期全过程,包括生产、验证和使用
VII.试验和验证在研发中至关重要
- 我们在试验中学习和成长
- 必须掌握局限性
VIII.必须鼓励勇于预想和揭示问题的行为
- 批判性思考
- 跳出固有思维模式,解放思想
- 倾听
IX.领导是基础
- 表里如一
- 高瞻远瞩
图 I-6 以另一种形式示出各个经验教训,该图分别以见解、集成及个体作为三个坐标轴,将各中经验教训分别放到不同轴上。其中,见解包含了准则、问题的实质、批判性思考、创新能力及发现;集成中包含系统及分系统,及其不确定性、敏感性和各自的平衡;而个体这条轴上包含了领导能力、人们的技能、交流等。这里只有具有代表性的东西才被包含在内。见解是我们通过教训得到的基本准则和所发现的事物。个体包含了个体的技能和组织特征。集成覆盖了各种复杂的交互作用,这些都发生在繁杂的航天系统和让整个系统成功运行的过程中。
图 I-6 准则和经验教训概念的三元图
根据上文总结的 9 条准则,下文列出 27 条启示,而这些准则和启示正是后续讨论
的大纲。
0-4 各个准则及其相应启示的列表
I.系统的成功取决于人们的创造力、判断力和决策能力
- 1.人是工程成功的主要资源
- 2.人的技能是获取成功产品的必备条件
II.航天系统是具有挑战性的高性能系统
- 3.高性能需求导致高能量密度和高敏感性
III.任何事物都是一个系统(整体)
- 4.系统工程和技术集成
- 5.风险管理
- 6.所有的设计过程都充满矛盾,平衡无处不在
IV.系统遵循着物理规律
- 7.问题的物理本质为最高主宰
- 8.工程是一个逻辑思维过程
- 9.数学是通用的!
- 10.运载火箭设计的基础
V.健壮性设计基于我们对敏感性、不确定性和裕度的理解
- 11.健壮性
- 12.理解敏感性和不确定性是必须的
- 13.项目裕度必须足够大
VI.项目的成功取决于能否考虑到全生命周期
- 14.设计空间受制于产品在生命周期内的定位
- 15.方案选择和设计流程
- 16.需求驱动设计
17.针对属性和成本的设计
VII.试验和验证在研发中至关重要
- 18.答案就在硬件及其数据里
- 19.现在试验或将来试验
- 20.独立分析、试验和设计是成功的关键
- 21.所有的分析和试验都有局限性
- 22.缩比是个关键问题
VIII.必须鼓励勇于预想和揭示问题的行为
- 23.批判性思考
- 24.更改无小事
- 25.预期那些意想不到的情况
IX.领导是基础
- 26.表里如一
- 27.高瞻远瞩
0-5 对经验教训准则的讨论
在下面的章节中,我们将根据上面划分的经验教训准则逐一说明。对于每一个准则,我们首先都讨论其在一般意义上的范围,之后提出一些所得到的教训来支撑该准则,同时也附加一些该教训的子领域。这里包括了一系列用于形成该教训的问题或项目。基本框架形式为:从一系列的工程问题中总结出经验教训及其推论,然后再使用从经验中得到的结论对每个问题进行分析和讨论。
准则I:系统的成功取决于人们的创造力、判断力和决策能力
- 人是工程成功的主要资源
- 人的技能是取得产品成功的必备条件
我们发现,在工程成功所需要的所有资源和技能条件中,人是首位的;其他所有的条件都位居其后。下面,我们通过两个启示来讨论该问题。
启示1:人是工程成功的主要资源
人是主要的资源。工程人员的判断力、创造力是确保工程质量的关键。所有其它的资源都是对人类智慧的支撑和辅助。
由于系统的复杂性,往往需要我们在特定的环境下进行判断和创新。此时,定理、规则和一些诀窍之类无法发挥其作用;
工具能提高效率,但不能代替人类的判断力和创造力;
指南和标准应修订以适合某一特定工程,避免教条式的方法,以免对设计方案产生不必要的束缚;
许多决策条件并不是显而易见的,而是要基于判断来得到,这就需要具有对系统知识的深入了解和智慧的个人决策;
洞察水平(对问题了解的深入程度)是一个工程性判断,由项目特征、阶段、敏感性和不确定性所决定; 奖励所有形式的创新。
该启示的副标题 “人是主要资源”清楚地表明:我们不能仅依靠方法和流程来获得成功的产品;但是,尽管航天系统复杂,却可以依靠组织内人员的判断力和创造力来创造、建立和经营出一个成功的系统。一些定理、规则,虽然是具有指导性的,而且也是不可或缺的,但不能取代人类思维的判断力和创造力。最终,人类才是获取成功的王牌和法宝。对于工具而言,也是同样的道理。我们需要方法、流程、规则和指南,但也无法取代人类的创造力和判断力。我们使用这些工具来辅助决策,但最终大部分的决策还是由人类来完成。在航天系统研制中总是不断被提出的一个重要问题是,“对于一个系统,到什么程度才足够完美?”,我们倾向于通过采用风险规避以及增加细节的方法来超越“什么是足够好”这个问题。人类的判断力和创造力应该在航天系统研制中的所有方面得到应用。一个组织应该对其成员的各种形式的创造进行奖励,而不是被失败的畏惧所笼罩着。
解决我们所面临的复杂技术和管理问题依赖于人类的判断力、创造力和创新力。在执行这些任务的过程中,其它所有的工具都是对人类的支撑和帮助而已。那么,我们的工作就是挖掘和发展这些人类资源。有很多的事例可以说明人类资源的价值及其所获得的回报。创造力具有如下描述的各种表现形式。基本启示就是:我们必须对团队成员所表现出来的各种创新形式进行奖励,同时要寻找出消除可能抑制人们创造力的消极因素的途径。
创造力表现为如下形式:
- 技术形式
- 艺术形式
- 硬件命名 (4)音乐形式 奖励人们所有形式的创新。
1.1 启示 1 的案例
- 瑞奇霍尔曼;
- 霍尼韦尔日历(进度);
- 木星推进剂晃动问题,“啤酒罐”。
- 合成风剖面
- SSME 液氧泵氮化硅轴承
- 绳系卫星绳索阻尼器
1.1.1 瑞奇·霍尔曼
在阿波罗研制的早期,麦克唐纳-道格拉斯公司有一位名叫瑞奇·霍尔曼的工程师,他绘制了一幅关于土星 IVB 问题以及与此问题相关人物的漫画。麦克唐纳-道格拉斯认为这些漫画价值很高,就专门出版了一个精选小册子,将其命名为《瑞奇·霍尔曼精美的图画》。这里,我们从中挑选出两幅来说明其内容和价值。图 1-1 说明的是我们所面临的发动机伺服机构动态响应问题。伺服机构和发动机机架之间的动态耦合造成了超预期的强响应,严重影响到了飞行器的可控性。瑞奇通过表达只有在谐振时才会有所损坏的道理,揭示了这一问题的机理。那些并不信服的人也由此接受了这样的表达。徽章上的名字“Eggleston”是土星 SIVB 研制阶段的一个项目经理的名字,那时要放行存在的问题令其麻烦不已。瑞奇的漫画不仅道出了问题的机理,而且也形象地概括了人的因素。图 1-2 是关于一个发生了故障的控制反馈电位计。如果去掉电位计,需要额外增加一些附加组件,而这又会加大系统的复杂性。在那时,电位计是一系列的线圈,电刷扫过时产生信号。每当电刷经过线圈组的下一个线圈时,信号在振幅上就会有一个跳变,从而形成一系列的频率脉冲。脉冲的频率与电刷扫动的速率有关。这一系列的脉冲就引发了一个动态问题。图中的引语“但它的确去掉了反馈电位计”,揭示了这样一个基本的原理,即增加复杂性会造成额外的问题。这幅漫画通过土星 SIVB 级尾部零部件数量多,布局复杂说明这一点。

图 1-1 仅在共振时产生伤害的示意图

图 1-2 “但它的确去掉了反馈电位计”
1.1.2 霍尼韦尔日历
在同一时期,霍尼韦尔公司发布了由比尔·艾迪绘制的卡通日历,这些卡通日历具有与瑞奇相同的特点。这些卡通画出版在明尼阿波利斯·霍尼韦尔的两本书上。我们选择了这些卡通日历中的三幅:图 1-3 是我们最喜欢的 4 幅图之一,该图表明所有细节都很重要。图中揭示行动之前理解任何异常问题的重要性;例如因为小数点的错误导致桥梁未能接上。图 1-4 揭示的是前期找准需求并对需求进行控制的重要性与放任需求增长和变化不加控制的关系。由于需求的变化,航天研制计划总是充斥着大幅度的成本增加。图 1-5 表明的是阿拉斯加的石油管道,它们从不同端开始喷刷,当它们相遇时其颜色可能就会不同(并未真实发生)。该图说明的是必须恪守规范和要求,或对系统而言要使设计具有一致性。
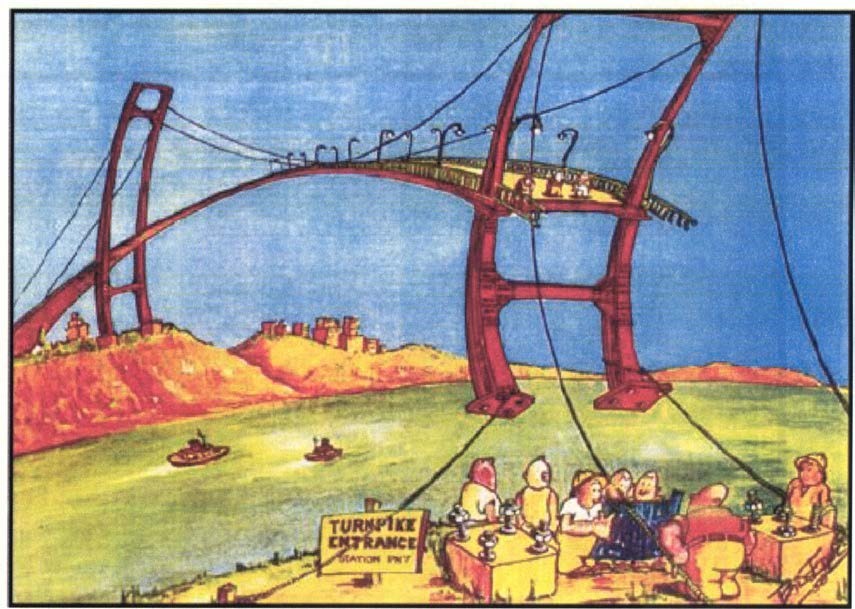
图 1-3 所以小数点确实是个问题示意图
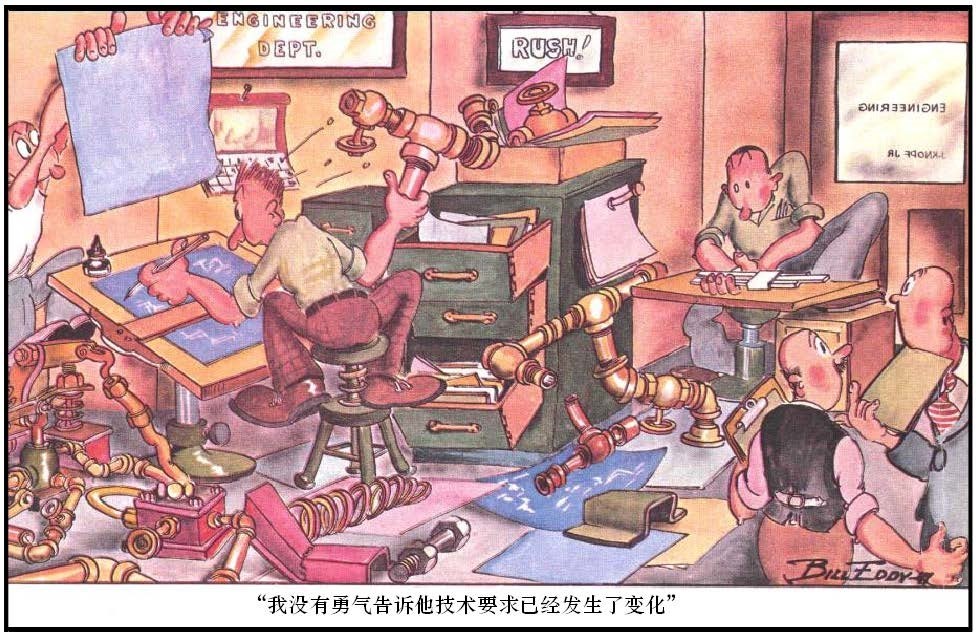
图 1-4 不断变化的需求示意图
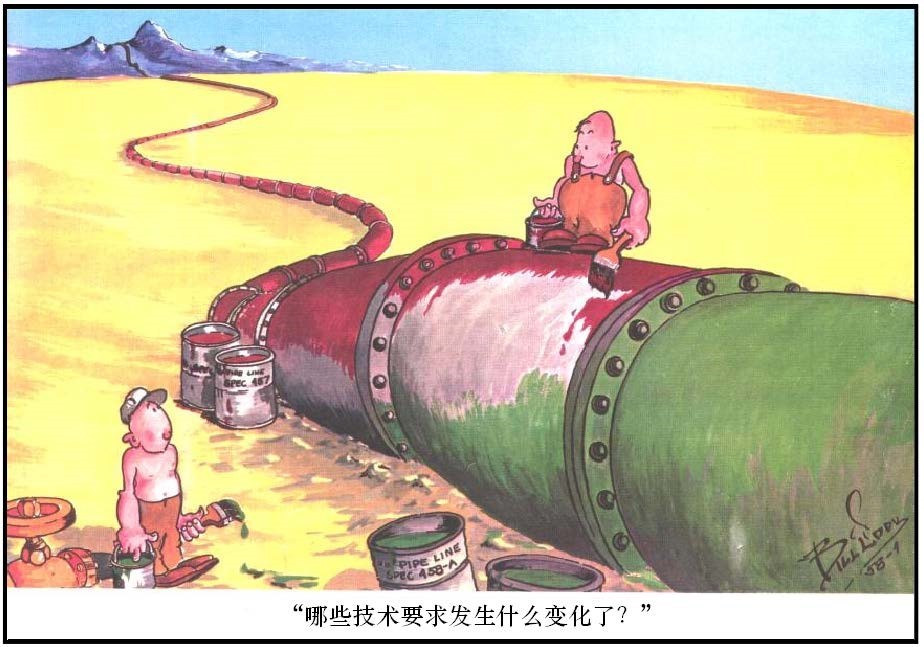
图 1-5 哪些技术要求发生什么变化了?
1.1.3 “木星”导弹液体推进剂晃动问题解决方案——“啤酒罐”
“木星”导弹首飞失利是发动机羽流回流烧坏了伺服机构控制电缆引起的。第 2 次发射由于液体推进剂晃动和控制系统之间的动态耦合而再度失利[Ryan, September 1996; Abramson, SP-106, 1967; Abramson, SP-8031, 1969]。其原因是动态耦合导致控制系统饱
和,箭体在最大动压时失去了控制。
前一个问题通过在燃气发生器废气排出箭体处设置防热罩而得到了有效解决。然而第二个问题则需要更多的努力和工程创造力,当时,没有现成的分析模型能够描述贮箱内推进剂的动力学特性。不仅是理论方面,相关的试验研究同样也是一项新兴技术。因此,该问题成为促进研究人员开展长期科学研究和发展相关试验技术的契机。NASA 的赫尔穆特·鲍威尔和西南研究院的罗曼·雅布拉辛是该项工作的领导者。然而,为保证“木星”第 3 次发射按时实施,需要一种快捷的方案解决当前的工程问题。为此,首先利用
“木星”的液氧推进剂贮箱进行了演示试验:将贮箱放置在有轨电车上,贮箱内加满水。通过驱动电车与轨道上的固定障碍物进行猛烈的撞击,由此激发液体的动力学响应。电影摄影机记录下了这些运动,并可由此推导出等效的晃动质量和频率,将其应用到控制反馈仿真中。然后思考下一步——“采用什么措施解决这个问题呢?”,使下一发运载器才能发射。有人曾经说过,在农场中经常用四轮马车运输装水的铁桶,为了使桶中的水不在运输过程中溅洒出来,通常会在液体表面放一些漂浮的木屑来减小其晃动(译者在农村看见农民在挑水浇地时将稻草放在水桶中降低晃动,防止水从桶中溢出)。当然,木材不可能用在导弹上,但在贮箱里放置一些漂浮物来达到同样的效果却是可行的。最初的设计就是在带孔的圆柱体上做出锥状断面,圆柱体中空使其漂浮在液面上。整个液体表面被这些称为“啤酒罐”的装置所覆盖。通过将这些装置应用于前面有轨电车上的贮箱内,地面试验证明了这种设计确实能够抑制晃动。这种防晃设计最终在“木星”导弹的飞行试验中得以应用。参见图 1-6。
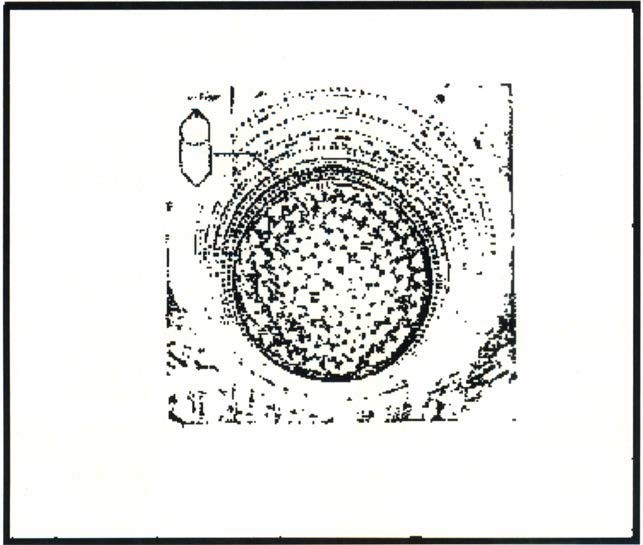
图 1-6 “木星”早期设计中的“啤酒罐”示意图
近年来,通过分析和缩比实验,挡板技术得到了发展和应用。作为贮箱结构环形加强筋的一部分,空心的折流挡板应用于“木星”的更新设计中。参见图 1-7。该设计在实现防晃目的的同时有效地加强了贮箱刚度,抑制了结构的弯曲变形,从而也减轻了结构自重。在航天飞机工程中,更进一步使用整体中心防晃框(即“鼠笼框”)的结构形式代替了环框上的隔板,以满足工程制造和安装上需要。

图 1-7 “木星”更新设计中的防晃挡板示意图
1.1.4 综合风剖面
在土星运载器研制的早期,我们面临如何描述大气风特性的挑战。这种描述要能用于六自由度控制和箭体动力学仿真,以将时间上连续的 3σ 响应数据用于结构设计。为了达到该目标,需要有两个方面的创新思想。第 1 个就是在 6 自由度响应输出中提取出单个参数偏差的 3σ 输出,与额定输出作比较,获得各参数响应的偏差。对这些偏差(δ)求均方根,再添加至额定值上,从而形成一个 3σ 设计值。问题是,这个离散的值需要和所有其他参数在时域上匹配,已确保载荷的平衡。Jud Lovinggood 提出了一种方法,得到 3σ 偏差,将其与额定值进行比例分析,形成输入参数的比率,该方法可以提供一个 3σ 意义上的时间连续响应。此外,为了提供 6 自由度仿真所用的外力函数,我们还需要有一种途径,可以基于时间上连续的方式建立风场模型。Helmut Horn,Jim Socggins,
Bill Vaughn 和 Robert Ryan 提出一种基于 95%风速和 99%的均方根风切变以及方波阵风
而建立的综合风剖面。这种方法在土星早期的研制中应用非常成功。随着寻求更加理想的风切变和阵风模型的需求越来越迫切,采取了多年逐月进行统计的一种方法,该方法将阵风和风切变在 50m 长度上的进行修正。基于这种精细 Jimsphere 风剖面,完成一个蒙特卡洛仿真,证实基于加速度计反馈的减载没有效果。由此,土星 V 在没有控制减载下完成了飞行。自那以后,一种新的矢量风模型和全球参考大气(GRAM)风模型已用到航天飞机和新的项目上。
对这些方法的必要性和应用情况总结如下: 控制和载荷响应分析需要时间历程连续的数据。
问题:可以基于扰动的历次仿真响应峰值作均方根统计,如何基于这些统计数据形成时间上连续的数据?
“A-系数”方法将单一扰动峰值与均方根值作比较,获取参数比例因子,进而可生成峰值和均方根值匹配的在时间上连续的仿真结果。这样就产生了在 1σ 意义下的所有响应变量的时间历程数据集。
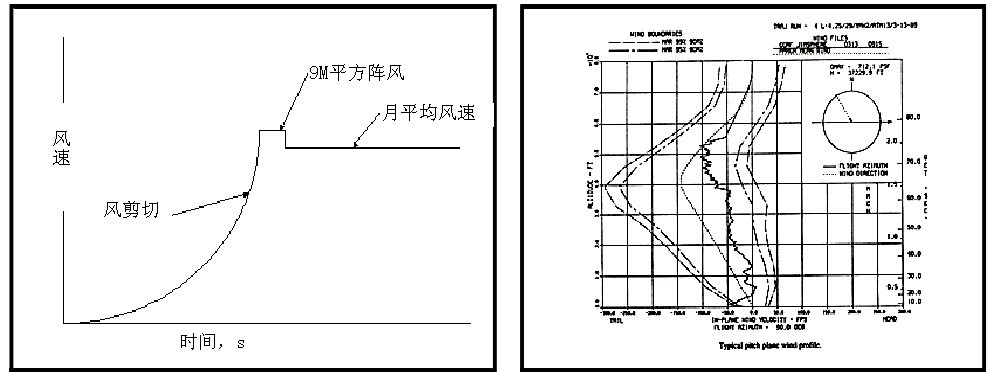
图 1-8 合成和实测风剖面方法示意图
1.1.5 SSME 氧泵氮化硅轴承
在航天飞机的实际飞行任务中,液氧泵轴承是一个关键环节,其他如涡轮叶片、焊缝也都存在相似问题。轴承磨损非常快,伴随其他一些问题最终导致每 1 至 2 次飞行后就需要对泵进行整修。为此,提出了液氧涡轮泵备用方案。在备用液氧涡轮泵的研制中存在的主要问题是:在工作前 50s 泵和轴承会过热和磨损,该问题对整个工程的研制造成了重大的威胁,急需找到一个快速解决的方法。为此,还专门成立了一个攻关小组来解决此问题。他们试尽所有办法但仍一无所获。在此工作组成立之前, MSFC 的一位工程师,Robert Tom 博士跳出了此框架,提出使用氮化硅(SiNi)球轴承,同时,也已经制订好了在轴承试验台上开展轴承试验的技术方案。此时,这个小组已经到了濒临整个工程要被取消的最后期限,除非他们能够找到解决方案。在此情况下,他们决定尝试一下使用新的氮化硅轴承。氮化硅是一种陶瓷材料。但普惠的管理者极不情愿去尝试该方案,并告诫不能在他的泵上使用玻璃球。普惠一名工程师带着他去商店,将新球轴承放进一个尼龙袋中,让他使用一个巨大的铁锤去捶击球轴承。结果锤砧和锤都出现了凹坑,但即便在显微镜下观察,也没有发现这个球轴承有丝毫的破裂。于是,我们就在泵上开始测试该球轴承,令人吃惊的是,在球或者轴承座上都没有出现磨损,即便痕迹都没有。结果就是,使用该轴承后,在飞行 20 次后该泵也没有出现轴承磨损问题。参见图 1-9。当前,所有航天飞机涡轮泵都使用氮化硅轴承。
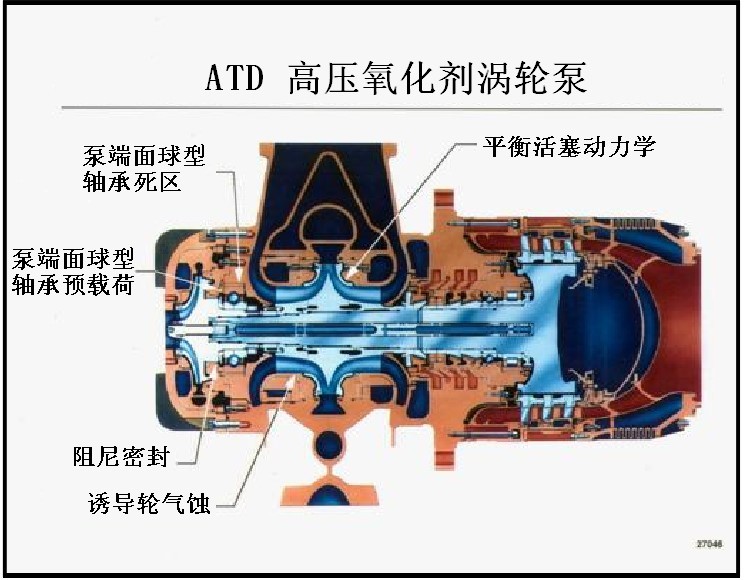
图 1-9 SSME 液氧泵氮化硅陶瓷球轴承示意图
1.1.6 绳系卫星的绳索阻尼器
绳系卫星具有很多可取的技术特征,可用于动力源、变轨等。然而,要实现一个绳系卫星则会面临许多的设计问题。当把一个卫星置于绳系上时,绳系会产生动态的振荡(犹如跳绳),最终可能导致整个系统遭到破坏。为此,成立了一个专业小组通过分析和试验研究来解决此问题。很清楚,必须采用一些抑制振荡阻尼的措施来解决此问题。方法就是在绳系输出卡箍上安装一个反旋弹簧的阻尼系统。当绳系产生动态运动时,安装在线缆末端的阻尼器也随之动态运动,从而对跳动的绳系产生了阻尼作用。在经过大量的系统试验验证后,绳系首次飞行取得了圆满成功。详细情况见图 1-10~图 1-12。

图 1-10 绳系卫星方案示意图
我们列举了这些实例是想说明人的革新和创新是如何解决如此复杂问题的。必须记住,对于个人和团体应该给予他们自由表达他们创新思想的机会,并为了推进这些创新而采取积极措施,同时奖励这些创新。
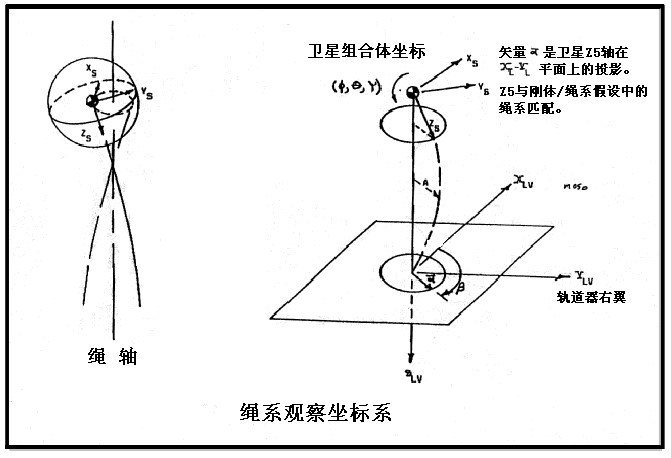
图 1-11 绳系卫星特征示意图
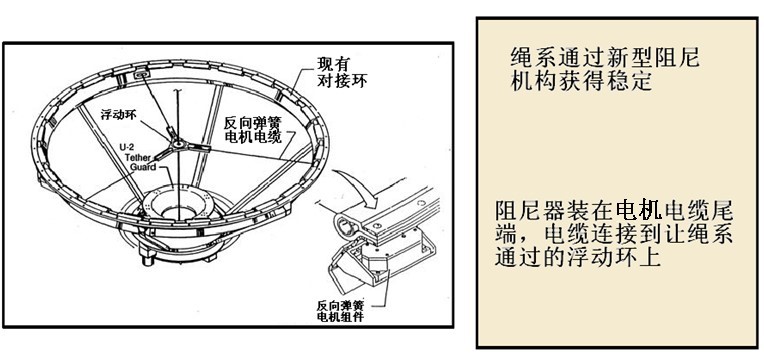
图 1-12 绳系输出卡箍上的阻尼系统示意图
1.2 启示 1 的重要经验
- 奖励判断力和创新力;
- 教条、规则和经验秘诀会扼杀一些关键的判断思考。
启示2:人的技能是获取成功产品的必备条件
尽管工程能力是非常重要的,但人的技能是获取成功产品的必备条件。
选择能兼听并能鼓励每一个人,使之形成一个整体的,具有决策力的强力领导人;
组织是完成任务的工具,必须具有领导力并能激发个人的积极性; 鼓励工程人员提高合作交流能力和技术能力; 将工程人员培训成具有系统视野的专家;
为了对总体系统形成一个全局视野,奖励参加到整体活动中的各领域专家; 提供一个开放性环境,鼓励创新并激发交流。
虽然人是取得工程成功的主要资源,工程能力也是非常重要的,但这并不够;人的技能是获取成功的必备条件。人的技能有很多,但应集中在培养并发展与个人、组织成长相关的技能上。
培养技能需要一个能做出正确判断和决策的强有力的领导层。领导层能鼓励每一个人互动并形成一个整体(团队凝聚),同时保持在技术的前沿。领导层是导师,是技术集成和系统工程的行为榜样。在这些能力中,当征询对报告的看法时,他们能提出自己的见解。每一个人都知道,领导的目标就是寻找到最佳平衡的设计、技术解决方案,或者真实的内涵,而所有这些都聚焦于一个系统。通过实例,他们展现出培养过程,同时以开放的环境鼓励创新和交流,并最大限度减小对失败的恐惧。这些领导者鼓励和激励着每一个人充满激情去实现他们的目标。
人的技能很重要的一个方面与提供一种途径实现个人与组织的成长相关。有大量的主观因素是和个人、组织的成长相关联的。下面的一些列表给出的就是一些已经被发现对此有益的相关信息。我们将简要对每一个都进行讨论,给深入理解提供参考。
2.1 个人和组织成长的特征
- 态度准则
- 生命之树(3) 感官参与
- 非定期强化
- 需求等
- 充分准备定律
- 有失才有得
- 期望理论(皮格马利翁效应)
- 跟踪和反馈
- 榜样的力量
- 制导和控制理论
- 交流
2.1.1 态度准则
心灵是成长的关键要素之一。一个人的价值取向是成长的养料。Whitmore 示出内心的价值取向、知识(技术)和经验(适应性)之间是相互联系的观点,如图 2-1 所示。思想的开放性影响着我们价值取向的变化、我们的获得以及我们得到的经验。知识和工作中的技术相关,而经验和完成一项工作的适应性相关。如果我们认为已经拥有了所有的答案,那么我们就不会对新知识或者经验呈开放态度了。对于成长的渴望是非常重要的,谦虚的态度也同样如此。谦虚意味着孺子可教。与价值取向准则紧密相关的是“心灵法则”,“一个人想象成什么样,他就会什么样”。
Earl Nightingale 如此表达此问题:“对于存在一个人脑海中无法磨灭的任何事物,总有一天都会表达出来”。他说:“心灵会集合所需要的资源来达到目标”。还有一些人这么说,如果事情本身不能按伦理来实现,那么它必将按照非伦理的方式来实现。有一警语:
“那些触动你心灵的事物要认真对待”。
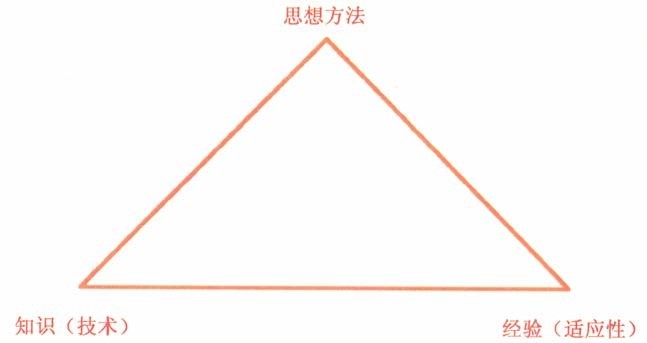
图 2-1 态度原则示意图
2.1.2 生命之树
在我们生命的不同阶段,我们要完成各类不同的角色。大多数情况下,这会产生一些矛盾,因为:(1)角色多;(2)又很极端;(3)又费时;(4)也很矛盾。因此,可能会经历某些挫败。有必要识别和弄清楚我们所扮演的所有角色,然后再决定如何去处理好他们。Covey 等[1941]提出将我们的准则、任务和角色与一棵树,即所谓的“生命之树”关联类比的方法,对这些角色进行剖析。图 2-2 是对 Covey 的一个改进。
当我们凝视这生命之树时,我们看到的是一棵正在茁壮成长的生命,看上去它是那么的强壮、健康、缤纷多彩、赏心悦目。树的主要组成部分包括树根、树干和树枝。树根提供需要的养分,树干满足树枝的需求,如养料和力量。树枝从树干中长出,提供给整个系统营养和美感。这些组成部分都有着自己特定的功能,但是对于一棵完整的树而言,所有这些组成部分都需要彼此协同工作以获取平衡。当所有组成部分都协同工作,相互配合来达到整棵树高度依存的强壮和美时,平衡就实现了。

图 2-2 生命之树示意图
在我们生命的不同阶段,我们所扮演的不同角色会产生矛盾和困惑。如果我们在生命之树和我们生活中的一些关键方面进行比较的话,会发现有一些相似之处并且是很有帮助的。我们可以参见图 2-2。在此图中,我们有准则、任务和角色。这和树的树根、树干和树枝相类似。我们生活中的准则是精神、文化和教育层面上的。它们是我们设置可实现性目标、决定采取的途径和做出决策的基础。我们生命中的任务主要和个人的生活方式以及所选择的职业相关。我们的任务决定了我们在成功实施这些任务过程中所扮演的角色。当我们在考虑我们个人和专业角色时,导致我们感到困惑的多样性相当多。获得能力、参加大量的活动以及解决各种复杂的问题,都需要消耗我们的时间。对于复杂事物,在逐渐成长为大人的过程中,我们学会了分解我们的活动。“我或者做这个或者做那个”。鉴于我们在生活中的多重角色,如果我们继续分解我们的角色,则可能导致我们在个人关系上面遭受痛苦,并延缓我们成长的步伐。和“树”一样,我们的角色是高度关联整体的一部分,需要得到平衡。回顾一下,树的平衡来源于各部分的分工协作。我们的角色看上去会出现一些不相关的矛盾和冲突,这是因为我们没有找出如何使所有事物协同工作的方法。平衡不是“我不做这个就做那个”。我们将看到,平衡意味着“我们所有都要做”。
在我们开展和我们角色相关的活动中,最初可能会聚焦于如何在此过程中实现平衡。首先,当我们考虑所有的角色时,看上去就像是没有人能完成且特别耗时的一件事。实际上,我们会发现我们大部分的角色都是“需要相互协作的关联整体的一部分”。在我们明白了不同角色之间如何在一块工作以及如何调节之后,在处理这些关系上面,我们的看法也将会改变,困惑也会有所减少。与其天天去争吵我们目前必须做的所有事情的含义和概念,不如把它作为一种挑战而接受。例如,“我的爱好就是征服自己的角色”。我和与我接近的人们互动,也就是,我会让他们知道我将接受挑战,并邀请他们也参与进来。由此,在我新的爱好中,他们成为了我的合作者。作为挑战的一部分,我们应把事情放在一个适宜的角度来看待。首先,要考虑完成此项工作所需要的时间。有时,我们在对该项活动会需要多少时间没有任何概念的情况下来确定和探讨时间底线。同时,如果确实存在一个非常急迫的底线,那么我们也应该清楚所得到的结果也必将是一个非常急迫的结果。偶尔,为了获得比急迫结果更好一些的结果,我们所有的工作可以暂时放一放,但是我们的所有活动都不能在这种急迫模式下来开展。因此,我们活动的时间线必须弄清楚,使之平衡。其次,要考虑活动重要程度。难道是我们不能辨别什么是重要,什么是不重要?当我们形成了一系列的活动安排时,困难可能在于找出什么是重要的部分。必须确定出对不同活动结果的敏感性,也就是,如果我们不去开展特定的活动或者减少付出的努力可能带来的后果是什么。在确定了要开展的一大块活动之后,那么后续要做些什么?需要明确各种活动所需要付出的努力和代价。至此,重要活动及其时间底线均为已知,且得到了权衡。
对此,我们将观察到我们的喜好具有了这样一些活动,在这些活动中部分和谐地适应了相互关联的总体全局。现在已经不再是零散的混沌模式下来做事了,取而代之的是在一种和谐模式下所有均衡后的工作都得了完成。我承担起了我的角色和作用!
2.1.3 感官参与
当 Bob Ryan 正在研习教育的时候,有一位教授强调过这么一个准则:在经历中你的感官参与越多,那么你的学习保持期(学习收获)就会越长(触觉、视觉、声觉、味觉和嗅觉)。我们在工程研制中的经历已经证实了这项准则。为了更好理解工程设计,亲眼经历、触摸、测试和分析过硬件的工程师将能够设计出更好的产品。如果他们敲击过一条焊缝、气割过一条线、制造一个鸽尾形接头,那么他们的学习和理解将会得到进一步加强和提高。最终,我们会努力工作让我们的工程师能够设计、试验出更好的硬件产品。麻省理工学院的 Ferguson 意识到了这一点,并非常详细地讨论了该问题,他曾强调:教育机构必须要调整他们的方法来教授工程知识,让他们的学生去一些生产硬件的地方。
2.1.4 非定期强化
Skinner 和 Watson 发展的非定期强化说明的是:学习保持期(学习收获)是和强化周期的不确定性成比例的。如果在每一次成功的尝试之后都给与奖励,那么学习保持期会很短。如果奖励是非定期的,奖励的时间事先并不明确,那么学习者就会更加努力来争取奖励,学习的保持期也就会越长,学习收获也越多。在发展技能和规范行为方面,非定期的强化是一个强有力的工具。经验清楚表明,要获得最好的结果,必须奖励付出的努力,但不能定期[Skinner, 1972]。
2.1.5 需求等级
了解和满足我们的需求是提升动机的必要要素。相关的知识可以通过理解马斯洛
(Maslow)需求等级来获取,如图 2-3。
亚伯拉罕·马斯洛博士生于 1908 年 4 月 1 日,于 1970 年 6 月 8 日去世,他的贡献主要和人类的行为和动机相关,在他早期的一部著作中,他将其基本理论概念化,阐述了人的基本需求。之后,在 1954 年就有了下面看到的一个需求等级的示意图。在这些等级中,位于下层的 4 个需求是刚性需求,顶层是成长需求。刚性需求内,在进入到下一个等级的需求之前,下一层的需求必须满足。如果在之后的时间内,我们克服了某级别的刚性需求(我们没有食物),那么我们就缓解了其刚性(我们有了食物)。
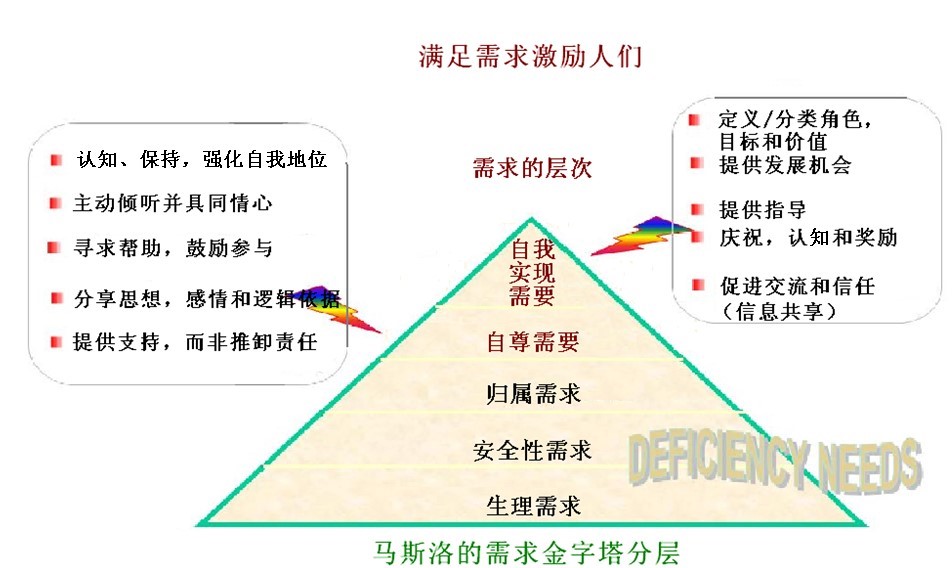
图 2-3 马洛斯分层理论图
在接下来的几年里,马斯洛断定存在有附加成长需求。因此,这个等级就得到了进一步扩展。在上述图中没有将扩展的等级表示出来,关于这些可以通过下面的一些描述来理解。下面展开的列表是按照上升次序汇总的所有马斯洛需求。
刚性需求
- 生理层面:食物、水、身体舒适度…
- 安全层面:远离伤害的方法…
- 归属层面:家庭、朋友…
- 自尊名望方面:自尊、他人的尊敬、胜任力…
成长需求
- 认知层面:知识、理解、观察…
- 美学层面:对称、有序、漂亮…
- 自我实现层面:尽力做得最好…
- 自我超越层面:帮助他人实现其潜能
尽管没有明确的科学依据来支持马斯洛的这种等级划分,但其观点还是得到了广泛的接受(基于轶事依据)。关于马斯洛对人的行为和动机的概念化的更深层次理解可以在[Boeree,2006]和[Huitt,2004]中找到。虽然可以研究与人类的行为和动机相关的大量观察事件,但其焦点主要集中在自尊和自我实现上。
自尊可以看作是一个人对自身价值的完整自我肯定。包括信赖和情感两个方面,并体现在行为上。此外,自尊可以让我们能够面对生活中的挑战,感受到快乐的价值。马斯洛相信,除了自尊以外,我们也需要他人的尊敬。提高自尊有大量的活动可以去做。
下面的列表给出的仅是我们生活中和他人接触时的一些活动。
- 认识、维持和提升自尊
- 学习如何来做到;通过例子来展示给他人
- 积极倾听和共鸣
- 我对你想说的内容感兴趣
- 寻求帮助和鼓励参与
- 委任而非控制;征求意见
- 分享思想、情感和理性
- 这是我的想法;你认为如何
- 提供支持,而非推卸责任
- 帮助他们实现他们的目标;但不要为他们直接去做
除了上述的以外,还需要考虑以下的诸多方面,即精神活动、实践、表扬、实现目标、穿着款式、正直、大方、好的工作作风、教育、谦虚有礼貌等等。
自我实现是对自我成就感的渴望;努力实现自己潜意识中想要达到的目标,也就是要成为我们有能力成为的任何事物。对于一个人而言,想要实现他们的潜在目标,必须花时间来了解自己。之后,采取正确的措施来实现潜在目标。
在学习型组织中,制定一些鼓励个人成长的条规是非常必要和有用的,下面列出的是有限的一些学习型组织应该提供的一些条规实例:
- 明确和阐明角色、目标和价值
- 提供发展的机会
- 提供指导
- 庆祝、认知和奖励
- 促进交流和信任(分享信息)
上述描述的是一些关于理解、满足需求的想法。这些思想只是一个缩影,目的在于追求更有激情的生活。因为每一人都不同,他们自己必须发现自己特有的需求。那你的需求会是什么呢?
2.1.6 充分准备定律
要明白个人和组织是如何成长的,那么“充分准备定律”就是必需的了。本质上,达到准备好的状态需要身体、情绪和智力三者的交融。直到融合发生,性能才会合符标准。当这些因素交融时,表现就会很好并且优美。达到准备好的状态需要费时(忍耐)和历练(实践)。当达到这种状态时,一切都显得那么自然。对于人们,你不要轻易放弃。多给点时间让“准备律”起作用。在执教 1955 年阿拉巴马州 A 级篮球锦标赛球队时,Robert Ryan 有一个 6 英尺 7 英寸(约 2 米)高的中锋,他是取得胜利的关键所在。
John 习惯于抢得篮板后下拉或者运球或者传球。我们安排了实践训练,让他直接投篮或者把球分出去。最后,Ryan 在篮筐上设置了障碍,这样球就可以反弹到他那儿直接再投篮了。在几个星期的训练后,Ryan 失去了耐心。John 失去了信心,他不懂得这些道理。有个周五,我们进行练习,但进步并不明显,周一,John 开始实际执行了这样任务,完成得非常容易。他再也不必去记住这些道理了。达到准备好的状态就是按这种方式来发挥作用的。在大部分的时间里,准备好的状态看起来都是瞬间发生的事情,但实际上它确实经历了很长的一段时间。笔者曾经见证了它在工程领域的作用,在这里它对所有突发事情都是适用的。当要增加新的技巧时,就要重复这个过程。
2.1.7 舍 • 得
另外一个关于发展的准则,“有所失才能有所得”是成长的基础。图 2-4 使用了一个
荡秋千演员来说明此项原理。成长首先意味着有一个可供出发的安全地方。在这个地方,人有社会接受度、处于关系平衡、供个人控制的领域、好的情感、平静的心态和身份地位。成长意味着为了到达一个新的位置,会处于十字路口的迷失以及不确定的浮游状态。这种十字路口的迷失是信仰上的一种跃升,建立在被脆弱、失落和其他一些不理想的风险笼罩下的挑战上。领导者和管理者有责任提供安全网,防止员工失落,这样他们就不会受到毁坏。抓住挑战意味着放弃能力、身份地位、技术、荣誉,变成一个社会的非顺从者,很多时候会面对经济安全的风险。一个更加有纪律性的生活方式意味着受约束、奉献。最终而来的有赞誉、冒险、成长、权力,但最重要的是实现。成长的过程中总是不断的选择,因此,成长意味着失去,而失去意味着悲伤,只有这样才能开辟一片新天地。

图 2-4 有失才有得
当 Robert Ryan 从一个动力学家转变为经理时,放弃所作的分析工作是非常困难的。在很多情况下,自己完成工作很容易,也很快,但是人员的成长往往意味着失去和让他们去工作。当他调动去实验室当副主任的时候,周围发生了一些戏剧性的变化。之前那些可以感觉自由进入他办公室的工程师们,现在感到了拘束。家具、办公室大小、位置等等全都不再对外公开。在经历了一阵困惑苦恼后,他开始走近工程师们,而不是让他们来自己的办公室。这种做法在一定程度上缓解和消除了一些孤立感,但总体上并没有解决该问题。另外的角色取代了老的角色,成长也就此发生。成长总是意味着失去,认识这一准则非常重要,它解释了人们为什么总是不情愿放弃安全、朋友而冒险去开辟一片新天地(位置、环境)。选择总是困难的,因为它意味着放弃。当人们试着通过选择来成长时,指导和辅导人们将会与这一原则保持稳定的协调一致。
2.1.8 期望理论(皮格马利翁效应)
人们总是倾向于学习或完成你所期望的,这就是所谓的皮格马利翁效应原理。让他们知道你所期望的,相信他们能够做到。一般情况下,他们都会让你对其所完成的工作感到惊讶。
2.1.9 跟踪、反馈、持续细化改进
学习遵循持续细化改进的准则。图 2-5 阐述的就是学习、提高和执行的螺旋式上升过程。Bob Guns 将此原理表述为学习的 5 个层次,即收集、使用、反思、改变和方法。对于每一次新的学习,该过程都会如此循环往复。这些原理和模型鲜明的指出了成长是需要时间的。换句话说就是,你不可能在真理的路上找到捷径。大量的经验表明要成长为一个成熟的工程师平均下来需要 20 年的时间。先学习,然后要求使用,付诸实践,然后思考发生了什么和怎样解决,然后采取变化措施,并重复该过程。
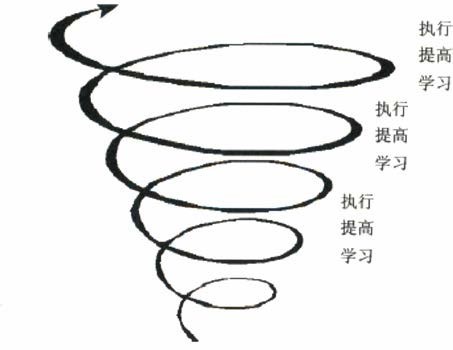
图 2-5 持续细化的模型图
反馈是包含于细化改进的原理。反馈有四个基本的来源,分别是:他人/自身、指导者/教练、同龄群体/他人以及导师主管。有两种类型的反馈:鼓励和强化、修改和更正。后者是令人不愉悦的,但是当所做的工作本身非常关键或者对于个人有决定性的影响,那么它也必须要去进行。通常的原则是去鼓励和强化那些积极的行为。如果这种反馈能够得到正确的实施,久而久之,积极因素将完全压制一些负面的因素。当 Cliff Wells 在
Louisiana 执教篮球时曾说过,“每批评一次要表扬 10 次”。
如图 2-6 所示,反馈存在很多的因素。它是一个连续的过程(实时),该过程涵盖了一个非常明显的滞后和如图所示的“do”循环。这个“do”循环起始于一项任务/愿景(想法),然后是学习。实际实施行为则由学习而生。之后依据提供新的学习和实施行为远景对这些行为活动进行评估。愿景想法和现实之间的差异性成了“动态张力”来推进成长。追踪程度是基于任务复杂程度、失败后果、员工能力和精神状态以及员工的发展。 Bob Guns 列举了如图所示的 9 项反馈准则,底线就是绝不要对员工进行人身攻击。这个道理很清楚,没有必要做详细的解释了。总之,反馈既包括积极的(鼓励)又包括消极的(批评),两者都是非常有意义而且必需的。然而正如一首老的流行歌曲唱的那样,重点集中在正面,消除负面。
图 2-6 反馈与跟踪示意图
2.1.10 榜样的力量
模仿榜样是人们发展的另外一种方式。当 Robert Ryan 第一次结婚时,他们是和另外一个有两个小孩的家庭共用一套客厅。Robert 坐在椅子上,将自己的腿翘在椅子的扶栏上。Jackie 试图去模仿他,但他的腿确实太短了。有一天,他说“我做不到这样”。无论是在生活还是故事中,一个组织都需要行为榜样。在 MSFC 有很多不是特别成功的行为榜样的故事,因为这些行为榜样并不适用于所模仿人员的个性品质。行为榜样必须适合个人和组织。不计其数的榜样都是正面的。要注意到人们是怎么通过衣着、谈吐等来效仿行为榜样的。在 MSFC 和所有组织中有很多的行为榜样都是具有传奇色彩的,他们的影响远远超出了他们本身从事工作的时间阶段。冯·布劳恩(Von Braun)博士就是其中的一个优秀代表。
2.1.11 制导和控制理论
(员工)成长的制导和控制理论的发展基于运载火箭的制导和控制理论。控制系统通过修正箭体姿态来应对短时干扰。制导(某种形式的优化)是保持运载器始终运行在通往目标(轨道)的路线上。运载器距离目标越近,制导增益就越紧密。在峰值扰动期间,不强调使用制导,相对于位置导引姿态而言,控制成为缓解扰动的方式。一个例子就是大风下和高动压下的减载控制。这些减载控制使飞行偏离了理想的轨道,因而导致了性能上的损失,这都是因为要实现减小载荷的目的。保持原来的姿态可能导致运载器破坏或者使结构重量激增,也使实际能够入轨的有效载荷大幅减小。人们同样也是应该在这种相同的方式下得到发展和管理。Greenleaf 说:“你必须有足够的控制力来维持秩序和命令,但是也不要因此而扼杀了组织成员的创造性和创新性。”个人和组织的成功成长需要将每一个人的创造性都发挥和展现出来[Greenleaf, 1977]。
2.1.12 交流
两种方式可以很好地描述技术交流的某些特点,第一个是“T-模型”,第二个是“设计过程中的交流”。
T-模型如图 2-7 所示,之所以如此命名是因为其拥有水平和垂直两个分量。它是一个聚焦于技术集成关键特征的全局性模型。该模型连同子系统、设计功能或者学科功能
(垂直)对系统(水平)进行描述,同时也强调了正式和非正式的集成的重要性。

图 2-7 技术集成的 T-型图
“T”形的水平位置代表的是系统。通过更换名称,技术集成的上部(虚线之上)被认为是系统集成、正式集成或者顶层集成。领导者和他的职员就是在这一层级集成中的主要促成者和执行者。该技术集成的重点主要与系统设计过程中的各个方面相关,也就是技术管理、系统认证鉴定等。主要焦点是交付在性能、成本、可靠性、安全性、操作性、进度和技术成熟度之间适度平衡的产品。平衡是通过对矛盾的管理和解决来实现的。与系统相关的所有决策应该在这一层级作出,与系统相关的所有技术矛盾也应该在这一层级予以解决。此外,系统所有的计划安排、控制和文档都应维持在该层次。位于虚线之下的技术集成是非正式的,它是获得一个成功设计的关键步骤。垂直条和子系统、设计功能或者学科功能相关。有很多情况下都是这些内容(子系统、设计功能或者学科功能)组合情况,它需要非正式的水平集成。这里强调的是子系统、设计功能或者学科功能之间的非正式集成(交流),同时也包括系统。它可以是大厅中的谈话、电话、办公室间的讨论、技术交流会议等,或者其它形式的交流。由于有很多彼此影响的垂直柱,因此在这些单元间的非正式集成就非常的关键。对于设计过程的学科对学科方面,各种功能组织是集成的主要执行者。而对于设计过程的子系统对子系统方面,工程设计功能则是集成的主要促进者。回想一下,“T”型的垂直边也表征着和子系统与设计功能相关的学科活动(分析、测试、仿真等等)。它们意味着深入的认知(垂直方向),但是却从系统观点和高度出发。这种深入的认知必须是准确的,同时对相关的不确定度也应有确定说明。
关于“T”模型的经典例子是篮球运动,它既是强调团队也是强调个人的一项运动。垂直柱是该项运动的基础,比如传球、投篮、运球、手和手指在球上的位置、掩护、阻挡等等。篮球是一项用手指尖控制而非手掌控制的运动。运球步法是篮球运动的第一要点,它要求双脚具有一定的灵活性,移动过程通过脚步滑移而非双腿之间简单的交叉来实现。在防守一个人的过程中,通常你不必直接去压制运球者,而是向上或者向边上去拍球,否则你就很有可能犯规。这些是非正式互动例子。系统部分既是正式也是非正式的。正式的交流通过团队跑位的模式来实现,而非正式的交流则通过利用和适应防守所做的一切来实现,譬如回防、掩护、横向突破。争球和界外球是另外的正式行为的实例。 图 2-8 是技术交流的第二种形式。图中所绘制的设计过程将在启示 4 中进行描述;这里使用该图主要是为了说明在设计过程中广泛交流的必要性。T-模型描述的是全局性的,而这幅图更加鲜明地将技术交流和详细的设计流程相关联。它描述了必要的综合交流的范围和多样性。这一点可以从子系统、设计功能、学科功能之间的相互作用关系以及它们相关的 IXI 和 NXN 图表(数据流)中看出。此外,经典系统工程的 V 形图指出系统集成需要提供学科功能、策划、系统设计的平衡等来支持设计过程。此外,安全性和任务的保障性的主要方面都有所阐明:安全性、可靠性和质量。最终目标就是获得一个平衡的设计。

图 2-8 设计过程中的沟通图
2.2 启示 2 的重要经验
应用相关准则于:培养互动技能,平衡我们的角色、需求和交流。
准则II:航天系统是具有挑战性的高性能系统
进入太空的物理本质要求必须从化学能中提取最大的可用能量。从势能到动能的转
化必须是高效的,不断推进当前的技术极限。同样的情况也适用于系统的结构或者干重。当前技术推动极限就是要使结构变得非常轻,强度非常高。此外,涉及到我们怎样进入太空而导致的损失,必须是严格管理和受控的。换句话说,今天我们仅仅只能使用现有技术来进行轨道设计(或入轨)。这些因素也导致了对高性能系统的需求,而高性能又会催生大的敏感性和一些不尽如意的相互影响和作用。
启示3:高性能需求导致高能量密度和高敏感性
高性能需求导致高敏感性和高能量密度;
为了能把有效载荷送入到特定轨道,需要高性能的火箭。为达这个目标,必须克服地球引力,且获得足够的速度进入到一条稳定轨道。
结果:
系统将技术推进到极致;
- 化学推进系统效率
- 结构质量效率
- 损失最小
当前技术仅仅只能保证我们进入轨道。
图 3-1 以工程、成本和项目需求的形式展示了该挑战。该问题的实质说明,工程研制中必须设计出高能量密度系统、高效推进系统和结构系统,同时要有效并高效管理所有的损失。这必须在成本和包括可操作性等在内的项目需求之间进行平衡。相对于其他已知的运输系统,这使系统风险很高。任务的成功是最重要的,这一点对于载人飞行更为突出,这意味着采取有效方式来管理和降低风险。当风险和成本关联时,如何来平衡系统就会变得非常困难和复杂。

图 3-1 高风险管理系统的复杂性
图 3-2 通过比对普通发动机与航天飞机发动机的能量密度,提出并反映了这种挑战性。图中绘制的是通用汽车发动机、印第赛车发动机、小喷气发动机、大型喷气发动机和 SSME 发动机的(自身)每磅质量所产生的马力大小对比。从中注意到,对于小汽车发动机其比值为 0.54,而 SSME 发动机则达到了 879。如果将小汽车发动机制造成和 SSME 具有相同能量密度和效率,那么其重量将只有 l/4 磅。对结构效率的需求同样也非常苛刻。例如,如果要将可口可乐易拉罐也做成和航天飞机外挂贮箱一样高效,那么它的壳体厚度只有现有厚度的 1/3。
所有这些高能量密度和高效率(特性)随价格的变化情况如图 3-3 所示。该图表描述了一条从航天系统研制历史中提炼出的设计准则,即对系统性能的要求越高,系统对于设计和性能参数不确定性的敏感度就越高。这是一条能够表征大量不同物理系统的具有普适意义的曲线。例如,对于结构疲劳的 SN 曲线与该曲线反向。箭体干重和干重裕度图基本上就遵从该条曲线。其间的含义在于,沿着性能曲线,我们的设计、验证和操作挑战性将随着性能需求的增加而非线性增长。这意味着,我们必须投入大量的精力来设计、制造、验证和使用高性能系统。这些复杂因素也使得预测和掌握系统中诱发的交互作用变得更加困难。Poole 在他的书《工程之外:社会如何塑造技术(Beyond
Engineering:How Society Shapes Technology)》[Poole,1997]中提到,大部分的失败是
复杂因素引起的,并且难以预测。同时他也总结到,高性能系统不仅导致了技术的复杂性,同样也导致了组织的复杂性。SSME 研制的大量问题都可以说是高性能需求的直接结果,这些问题稍后再进行深入讨论。
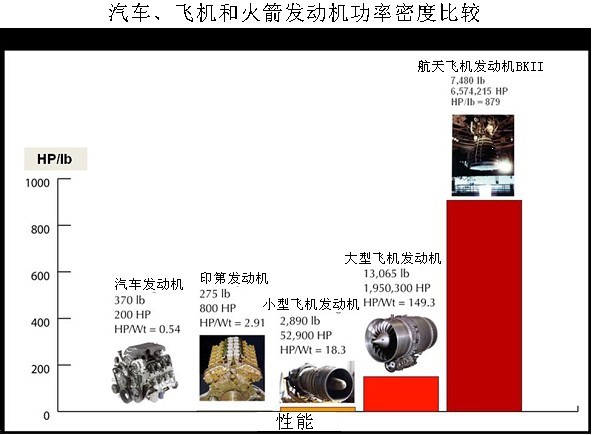
图 3-2 交通运输系统发动机的功率密度比较图
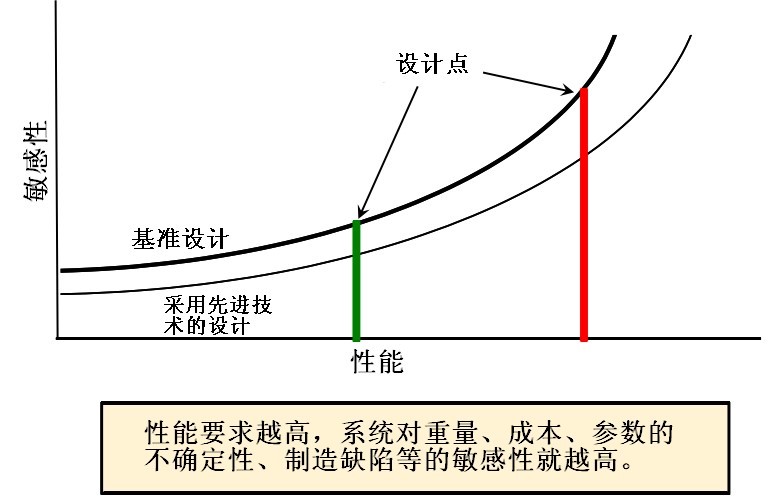
图 3-3 敏感性与性能要求示意图
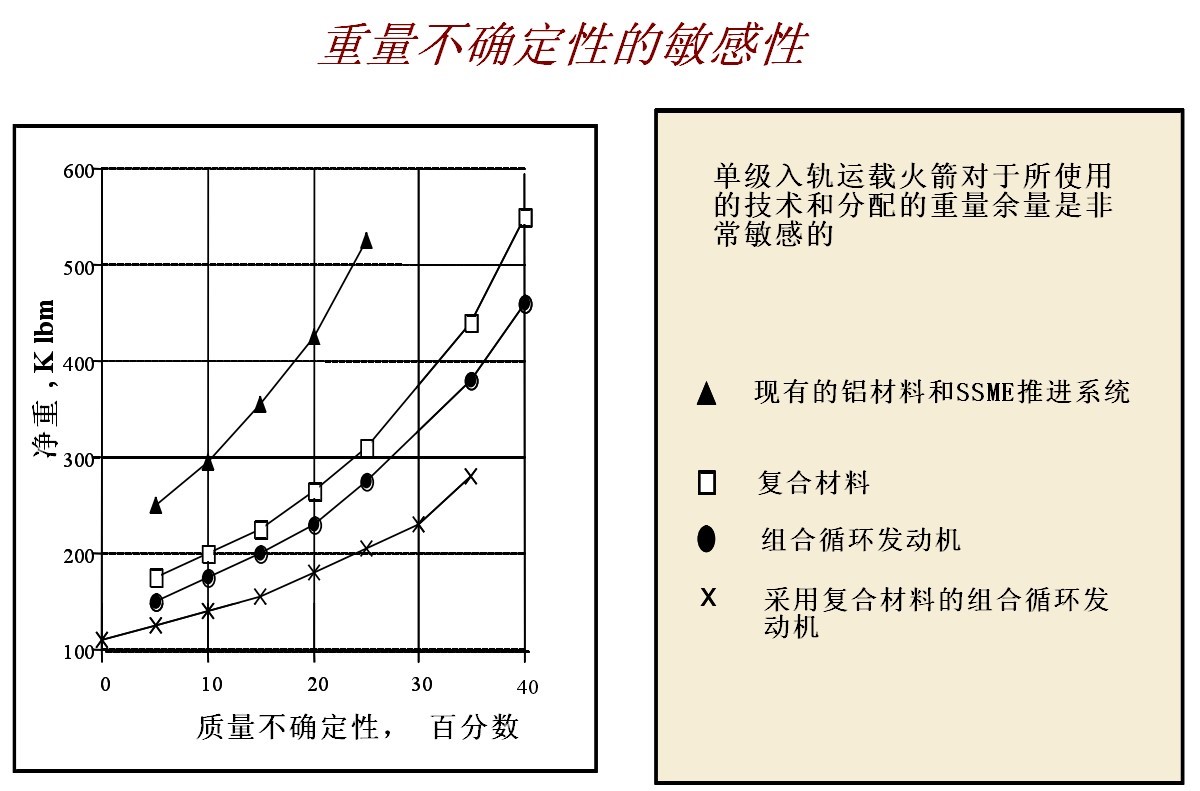
图 3-4 干重与重量不确定性百分比之间的关系图
图 3-4 描述的是一型单级入轨运载器的敏感性,图中绘制的是干重随重量不确定性百分比之间的关系。相同的非线性趋势同样也反映在了图 3-3 中。
总之,高性能的需求导致了高能量密度和敏感性,为了获得成功,就需要深入认知和精巧地寻求系统的平衡点。
3.1 启示 3 的重要经验:
高能量密度系统需要 ·深入掌握和理解 ·精巧平衡
准则III:任何事物都是一个系统(整体)
顶层设计和技术集成的准则叙述如下。它们是本节中后续部分的基础与概要,其他章节也是如此。
物理本质和其他支配准则主宰着所有设计活动; 一切事物都是一个系统,由复杂的、相互作用的各个部分组成,该系统有一个最佳的平衡状态。在平衡状态之外使用代价高昂; 最佳平衡状态的实现是通过理解敏感性、不确定性及其裕度得到的,这将有利于量化风险和提升设计可信度; 当前,复杂系统的设计实践必须进行(顶层)分解
-子系统,设计功能和学科功能;
克服复杂性并达到平衡设计需要技术集成;
-设计过程是所有参与人员的互动过程;
-开展组件(分系统)设计并再集成到一个平衡的和经验证的产品中;
技术集成是通过正式和非正式的交流来开展的,遵循于 T 型理论。单机自身在系统中需精确运行;
创新、创造力和决策能力是成功设计的基础。
这些准则体现的是这样一种思想——我们可以很容易地把复杂系统作为一个整体进行识别;许多由复杂的子系统和部件组成的系统必须设计得健壮而具有交互功能,以支持系统生命周期的需求。
本部分包含接下来的三个启示:
- 系统工程和技术集成是项目成功的关键
- 风险管理
- 所有的设计过程都充满矛盾,平衡无处不在
启示4:系统工程和技术集成是项目成功的关键
系统工程和技术集成涉及分析、试验和仿真的合理性,以及软件和硬件集成、接口协调、相互作用、验证等,所有这些都是保证产品研制成功所必需的。以下是一些基本的经验教训:
- 设计中所遇到的问题 70%-80%都是由系统或技术集成中的某个缺陷所导致的。换句话说,问题的出现往往并非由于未发现或缺乏理论指导,而是忽视了基本的系统原理。
- Dick Kohrs 认为:“系统工程是 95%的沟通和 5%的设计”。然而我们必须意识到,必须不断提高专业技能,否则,交流或集成毫无价值。
- 技术集成对设计过程至关重要。鼓励技术集成,并评估正在做的工作;
- 沟通是关键,是技术集成的重要部分;
- 非正式的沟通交流往往是最有效的;
- 掌握各种相互作用的机理对集成十分关键;
- 不断核查需求及其对下游影响并进行验证;
- 不断核查假设条件。
上述强调的是基本的系统准则,而当强调系统时,我们应认识到必须不断提升专业技能,否则就没有有价值的东西进行集成。专家们必须掌握并量化结果的有效性,此外还需要确定与结果相关的敏感性、不确定性和余量[Blair 等,2001]。
设计过程的一个重要方面是技术集成。技术集成是一个设计项目中所有成员的互动活动。设计项目被划分成各子系统,零部件设计完成后,再重新集成到一个平衡的系统设计中,该系统可以被验证和确认,并将在可接受的风险范围内使用。任何一项活动都应该努力确保技术集成的最终完成。正如上面所提到的,交流是实现技术集成的一个关键因素,并且很明显,信息交流也是技术集成过程中一项无处不在的活动。
在涉及高能量密度的复杂系统设计中,不仅掌握机理很重要,掌握相关的互相作用也很重要。在很多情况下,即使轻微的能量损失也会导致系统不稳定。此时,一个小的差异即可能带来巨大的影响。此外,系统需求也可转变成成熟设计的结果。因此,需求和假设要在“设计和分析循环”(DAC)的每个阶段进行追踪和验证。
为了使设计过程有效,并利用当前最先进的技术水平(SOA)知识库,在任务和程序要求明确后,航天运输系统(STS)必须划分成可执行的多个单元。SOA 信息存在于三个不同类型的组织:(1)行业,(2)政府,(3)学术界。这三个组织的能力和知识储备代表了 SOA,他们掌握标准、专著、技术、制造工艺等。这种能力和知识储备是在高能量密度和极端环境条件下实现成功设计的主要资源。通过下面两个例子我们将阐述启示 4 的主要观点。
4.1 实例:
- 设计过程/技术集成的表征(定义);
- 航天飞机第一次飞行气动力异常。
4.1.1 设计过程/技术集成的表征(定义)
这个示例的目的是通过一个设计过程的概览来说明技术集成。设计过程中更多的细节可以从[Blair 等,2001]中找到。示例中给出了设计过程的不同组成部分,同时还提供了相应的解释,类似于“剥洋葱”的过程。读者将对整个设计过程获得深入的理解;在理解的过程中,读者可以了解她/他适合哪部分的工作,以及与谁配合。需要注意的是,插图代表完成设计所需的功能,不应与组织图表相混淆;此外,与设计过程相关的功能和活动与组织和项目是无关的。
下图 4-1 是项目生命周期流程。可以看到,该流程开始于任务描述,接着是各种要求。设计流程始于定义架构,并通过细节设计推进,然后是产品制造、验证和使用。从最初的设计活动一直到细节设计环节,存在很多与 DAC 和验证试验相关的循环活动。达到设计成熟的状态需要经历很多循环,同时设计细节也不断明朗,与分析、测试和模拟相关的支撑数据库也不断增加。

图 4-1 项目生命周期流程图
如图 4-1 所示,在开展设计活动之前,必须进行任务描述和需求定义,明确所有的需求。过去,有的项目需求没有充分定义,其意想不到的后果是成本大幅超支。刚开始时,定义最顶层的需求,例如轨道、有效载荷、成本、进度、安全、最苛刻的使用需求等等。然后,确定下一层级的需求,以完成系统、子系统、组件和零件的所有设计。随着设计过程持续开展,需求不断地定义、迭代、验证和记录。
从体系生成到包括细节设计的全生命周期的中心部分,通过分解和再集成得以实现,如图 4-2 所示。尽管分工是完成一项设计的必要条件,但它同时增加了复杂性。从图中可以看出,分解和再集成过程始于最初对运载火箭的定义,并结束于集成系统的构型。首先,系统被分解为不同的子系统(硬件部分),这衍生出需跟踪管控的系统接口,并通过接口要求文件(IRD)和接口控制文件(ICD)实施跟踪。然后,每个子系统再根据设计功能进行分解,确保子系统的属性满足衍生的需求。为了完成设计,各设计功能又分解到各学科功能。各学科功能通过分析、试验和模拟提供最终的设计结果。
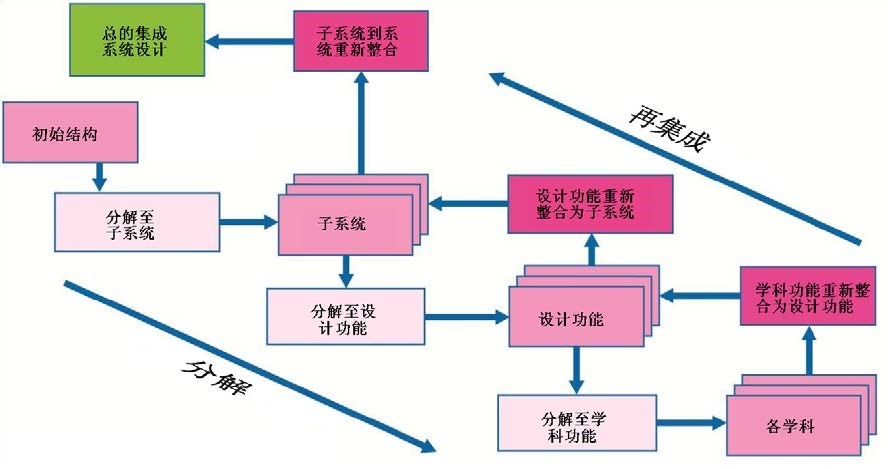
图 4-2 分解与再集成图
系统按上述方式分解细化,子系统设计完成后则需要重新集成为系统。首先,各学科功能要重新集成,要求完成充分的分析、试验和模拟;然后,需要开展敏感性分析、不确定性和裕度分析,为风险评估提供参考。接下来,各设计功能需重新集成。这个过程必须确保设计属性满足分解的需求,并且需要进行确认。此外,所有的交互和非线性过程必须被考虑进来。最后,基于所有的设计知识进行风险评估。此活动至少需要设计师、专业学科基础知识和安全任务保证(S&MA)技术提供支持。系统集成的最后阶段是处理子系统和系统之间的接口,尤其是接口间的物理、功能和信息流必须匹配。同时,与总系统相关的相互作用和非线性特征必须匹配。系统集成和验证、使用约束和系统风险也必须同时考虑。当系统分解和重新集成完成时,系统设计也就完成了。
图 4-3 从另一个角度对分解过程进行了认识。图中显示了与子系统相关的主要活动、产品,以及设计功能和学科功能。
通过图 4-4 可以对设计过程获得进一步的认识,该图采用的方法即“剥洋葱”过程。这里展示的是一个子系统及其设计功能的例证。请注意,需求自上而下、设计属性自下而上,过程中接口就形成了。图的中间列举的是一个系统及其某些子系统。沿着实线框选的模块为例,从运载火箭系统到推进剂调节系统,每个系统都由虚线箭头表示的设计功能完成。图的左上角是一套系统的设计功能模块,其中处于最顶层的设计功能即运载火箭系统。它负责所有技术方面的系统设计,包括经典的系统工程、技术集成、硬件/ 软件集成等。此外,还包括协调和集成各设计活动。以类似的方式,每个子系统的顶层
也进行类似的活动。
|
子系统 (子系统管理者) |
设计功能 (设计师) |
学科功能 (学科专家) |
|
管理与子系统设计相关的所有活动 |
硬件、软件和流程的构思与设计 |
分析、试验与模拟 |
|
硬件和软件 |
技术要求和图纸 |
分析、试验与模拟的结果;数据手册 |
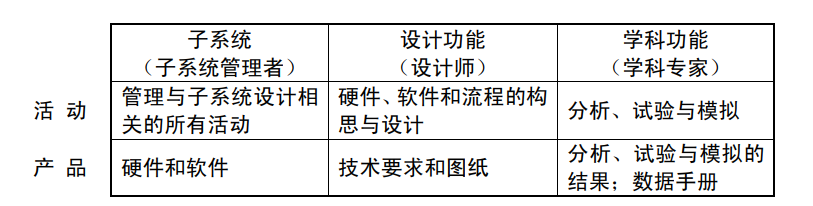
图 4-3 分解要素图
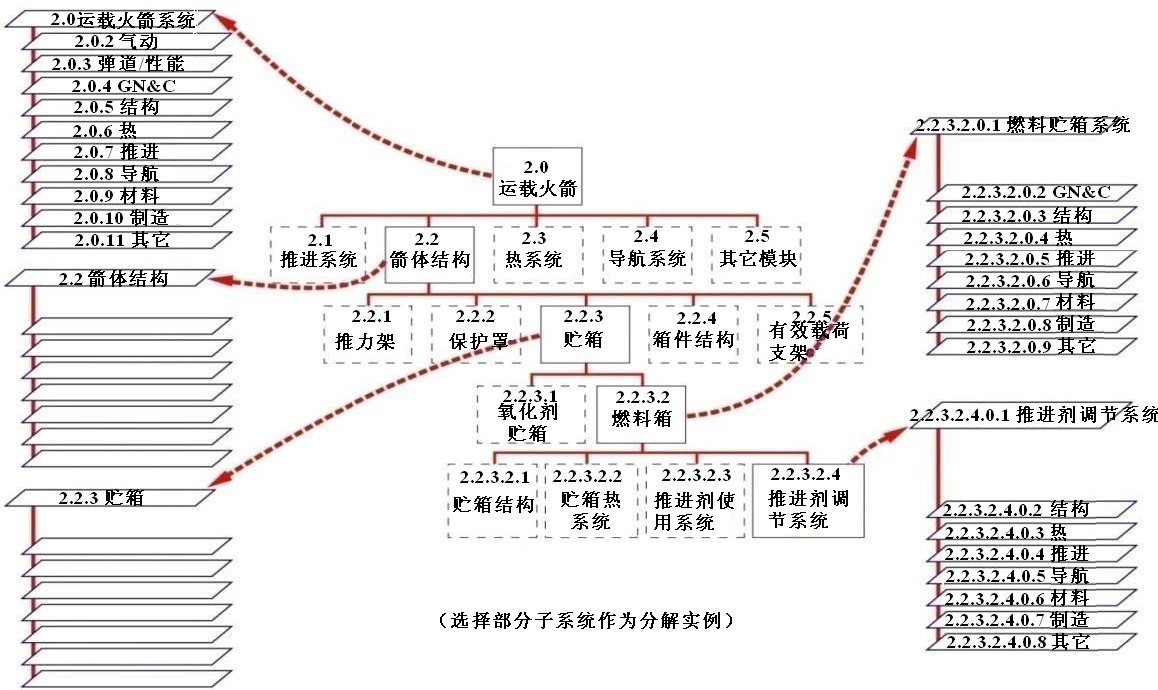
图 4-4 典型的子系统与相关设计功能图
图 4-5 显示了系统的技术集成、设计功能和学科功能。设计功能列于图的右侧。它们提供与每一个设计功能相关的图纸、技术要求和/或数据资料。例如,空气动力学设计模块给出飞行器外形(母线)和相关数据资料;弹道/性能模块设计满足有效载荷要求的轨道。这些都是基于一定的约束、结构、图纸和工艺等条件完成的。系统层面负责所有技术方面的系统设计,这包括经典的系统工程、技术集成、硬件/软件集成等。此外,该系统设计层面也负责集成设计活动的协调。
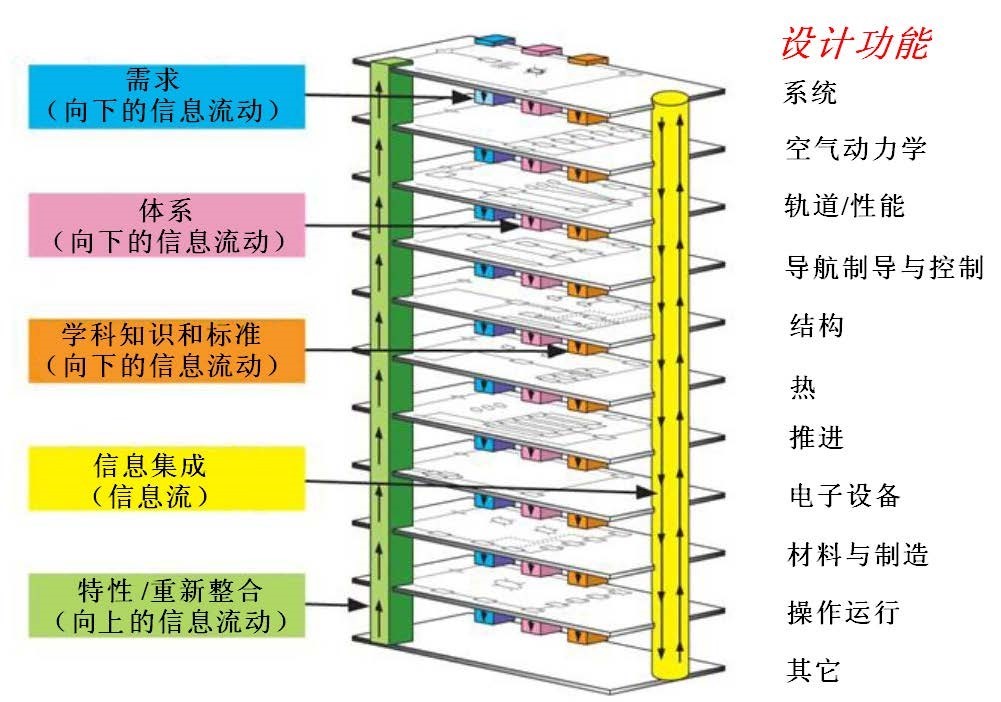
图 4-5 技术集成系统、设计和专业功能图
垂直通道表明了系统控制下需求、体系和基本准则等相关信息的正常流动情况。系统通过设计功能迭代的方式得以实现。最初,由各个功能设计方代表组成的小型团队通过数次迭代后完成概念设计。当设计通过 DAC 循环过程逐渐成熟,参与人数与支撑数据库也随之增加。而图 4-5 表示的基本思想仍在一个更大范围内继续进行。黄色通路代表设计功能之间非正式集成,这是实现平衡设计的一个关键因素。此外,在每一个设计功能的内部,非正式集成也是存在的。当设计收敛时,进行再集成,并且设计的收敛属性(绿色通道)进入到了系统层面,它们最终置于构型控制下。如果不能获得一个平衡、收敛的,且有足够余量的设计,就需要进行更多的迭代,或者改变系统层的一些要求。
我们已经讨论了一个系统或子系统设计所需要的功能设计迭代过程。现在考虑发生在一个设计功能中的过程(即,设计功能层面上发生的事情)。在这里,设计功能被划分为学科功能。例如图 4-6 中的结构设计功能。“设计”标签代表结构设计师在 CAD 设计机器上工作,根据来自系统层面的需求、系统框架和基本准则,设计出满足要求的结构。要达到这一目的,设计师需要一些专业基础知识,这些知识在图中有所列举,包括自然环境、材料科学、热力学、控制、载荷和强度等。利用这些学科的专业知识,可以开展分析、试验和仿真工作,并且可以获得相关的数据库。学科功能也必须符合其相应技术领域各类标准。
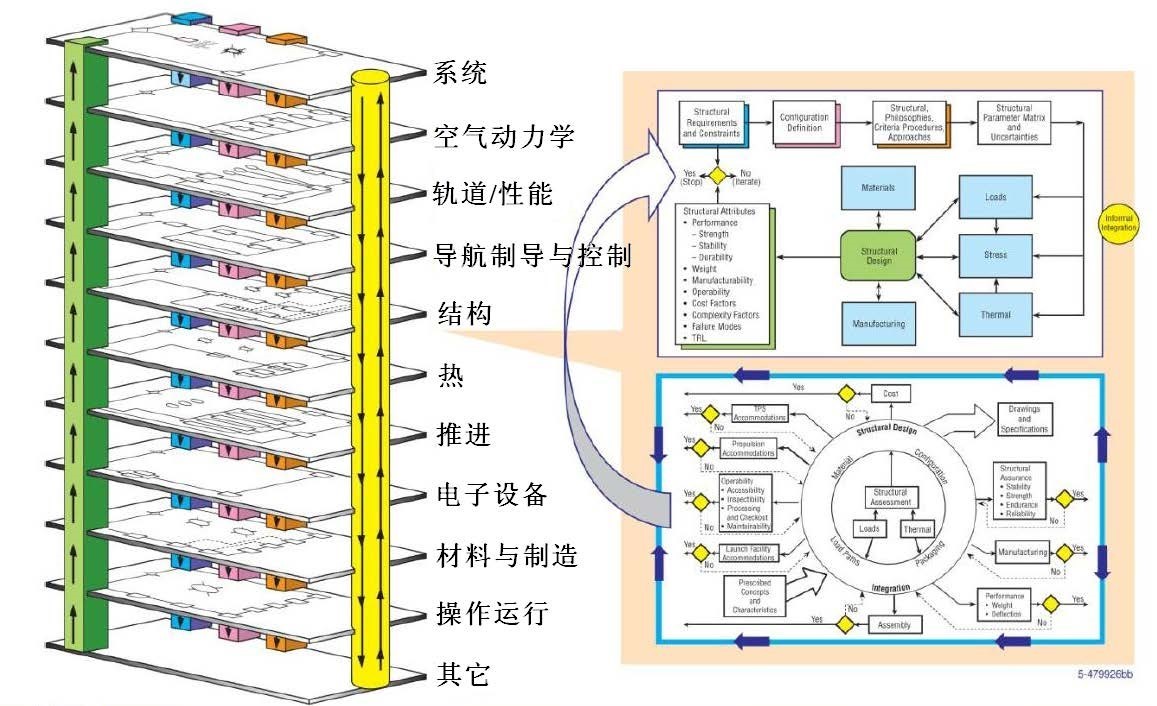
图 4-6 结构设计功能的学科功能分解和决策门
学科(专业)功能模块为设计者提供必要的信息,以确定结构设计是否满足要求。这是一个反复迭代的过程,需要参与者进行大量的沟通。基于对交叉学科专业功能的了解,设计者通常根据经验和想象力假设完成一种设计(几何结构,材料等)。然后对虚拟的设计进行分析以确定其属性,并与需求进行比较。
需要注意的是,设计师的活动可以被认为是一个输入/输出过程,自变量是设计师(设计变量)的选择,应变量是最终设计的特征和质量(设计属性)。
当然,其目的是让属性匹配需求。这是上图所表示的结构设计功能层面的单一决策门。然而,当有多个要求需要满足时,就有多个必须成功通过的决策门。这些决策门的例子都显示在下面的功能设计平面示意图中。包括的属性涵盖结构强度、耐久性、重量、推进调节和热防护,以及制造和装配的兼容性等。可以注意到,除了这些,决策门还包括成本和“各种属性”,例如可操作性。当设计迭代并成功达到所有的目标,结构设计功能模块可以实现结构设计,满足系统属性要求,并输出图纸和技术要求。
这一过程显然不会只出现一次,而是需要多次反复和权衡。设计本身就是一个平衡和权衡的过程。获得可接受的设计,需要在在多个学科功能和设计功能之间反复权衡和迭代。如果在所有参与者之间没有反复的沟通和交流,我们将不会获得成功的设计。系统层面很多时候也需要不断的反复和迭代,特别是当要求放松或重新规划的时候。
这些高度关联的功能和活动涉及大量信息的流动。如何管理这些信息?输入输出矩阵可以有效地识别和定位信息,并提供给需要的参与者。各子系统之间流动的信息流,可以设想为一个 I×I 的系统矩阵,子系统在矩阵对角线上,子系统的输出在单元的水平线上,而子系统的输入在垂直线上。设计功能和学科功能中的信息流通过一个 N×N 的矩阵表示,这个矩阵(与 I×I 的系统矩阵)有一个相似的布局。该矩阵提供的占位符可以识别和定位集成过程所需的信息。在某些情况下,矩阵信息可以正式确定,例如在子系统的接口控制文件和设计、分析循环数据手册中。
回想一下,技术集成可以归纳为多子系统的设计团队中所有成员的互动:首先进行子系统分解→然后进行零部件设计,再把零部件集成到一个平衡的系统设计中,该系统可以得到验证和确认,并且运行时风险可接受。技术集成过程反映在图 4-7 中。
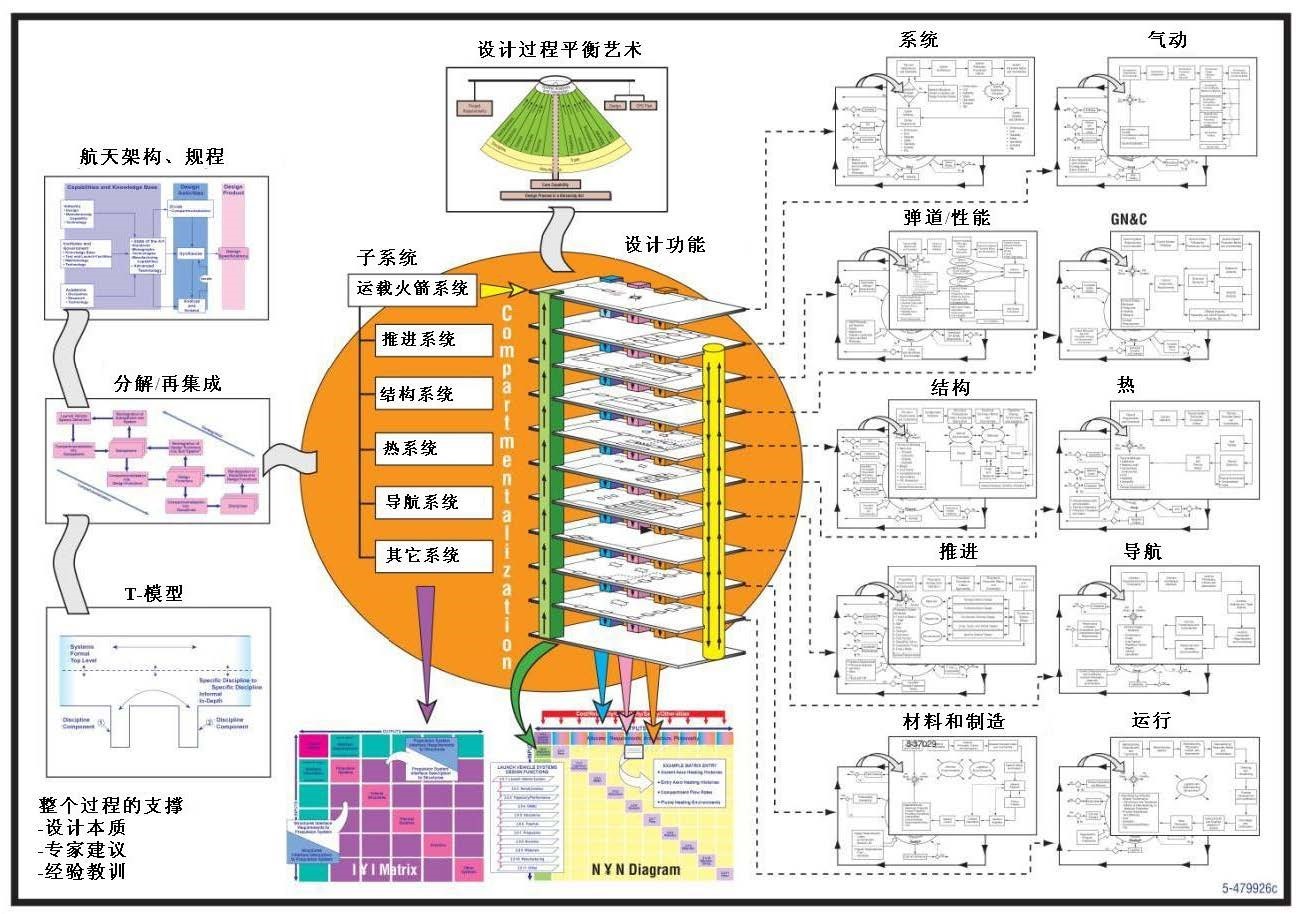
图 4-7 技术集成图
有两种基本的活动覆盖技术集成过程:经典系统工程与安全任务保证(S&MA)。 经典系统工程提供技术集成过程的框架、过程控制和相关文件。图 4-8 代表的是传统系统工程“V”框架,在设计生命周期中遵循从需求到研发生产、组件/子系统验证、系统确认、认证直至使用这样的一个流程。
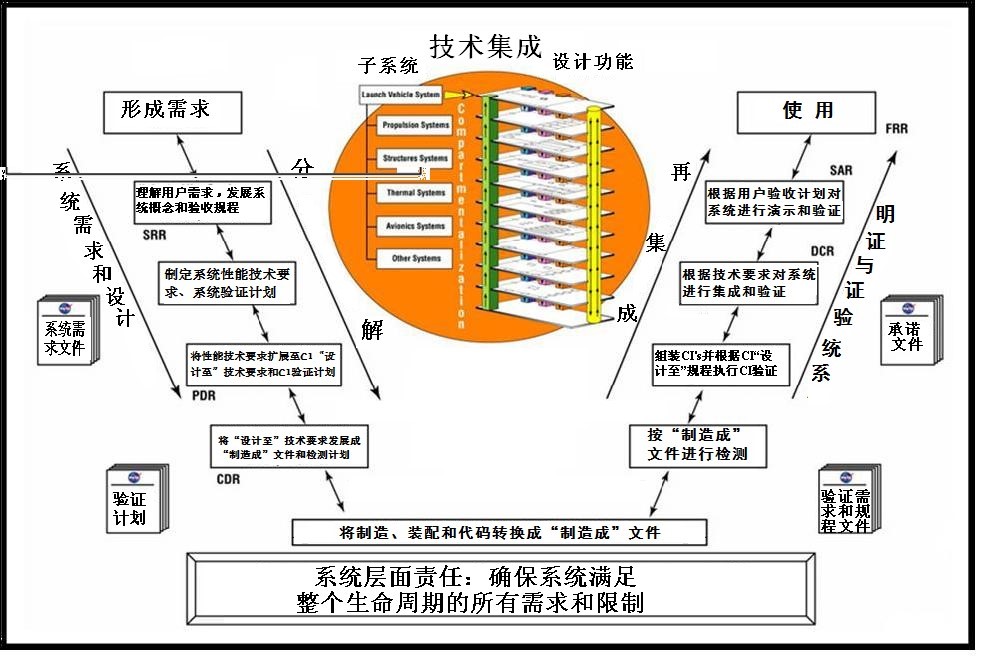
图 4-8 传统系统工程图
安全与任务保证(S&MA)活动是设计活动的一个固有部分。图 4-9 给出了 S&MA
的三个主要部分:(1)系统安全性-识别、检测和缓解风险;(2)可靠性-识别故障模式、原因以及概率;(3)质量-过程控制以及硬件和软件的验证。
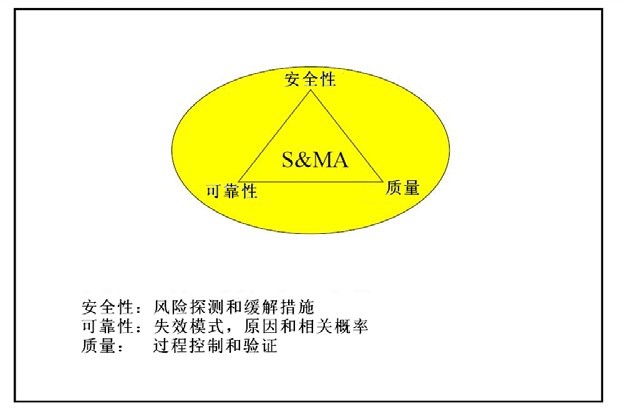
图 4-9 安全与任务保证图
图 4-10 将经典系统工程和 S&MA(安全与任务保证)技术涵盖到技术集成图表中,并且总结了设计的技术执行方案。
图 4-10 设计技术实施图
获得成功的产品显然需要适当的技术执行方案,同时还需要精明的项目管理以及合适的个人和组织文化来支持。图 4-11 展示了这三个交互关联的基本要素,它们共同作用生产出成功满足设计目标的产品。这些要素在一份单独论述卓越工程的报告中有进一步的阐述。
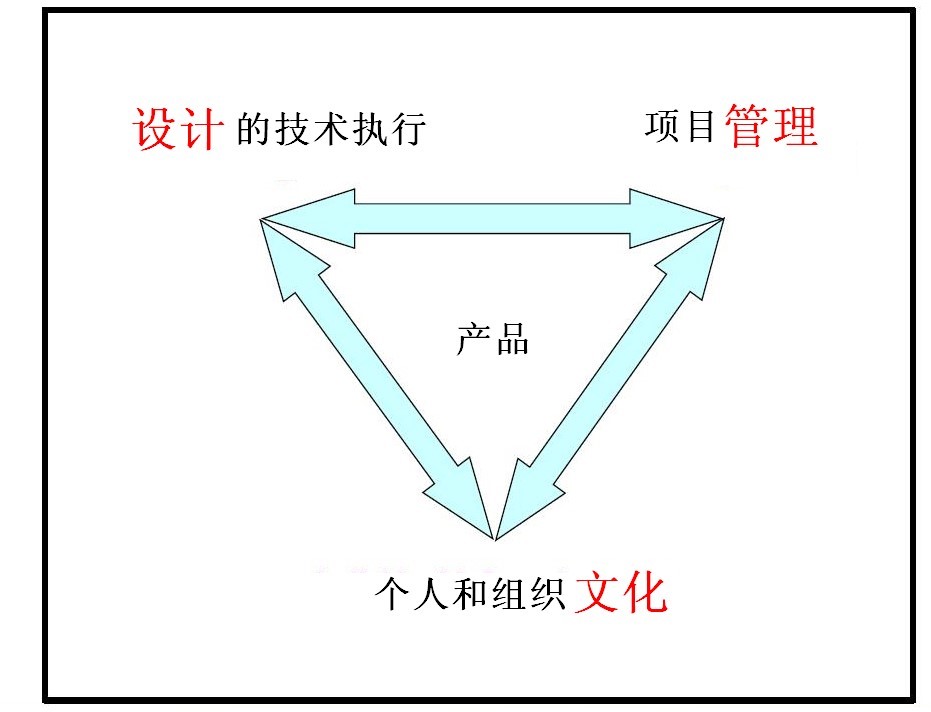
图 4-11 产品成功要素
4.1.2 航天飞机第一次飞行气动力异常
航天飞机是一型高性能、错综复杂、各项平衡的发射系统。这些因素综合作用的结果,导致航天飞机的复杂相互关联作用既高度敏感又难以预测。在航天飞机首飞 STS-1 任务中(图 4-12)出现了一些意想不到的情况。
首先是固体火箭助推器起飞产生的超压问题,导致姿态控制系统增加附加力臂,进而使飞行器产生大幅动态振荡。这些现象将在以后讨论。第二个令人诧异的事情发生在上升过程中,出现了两个异常现象。首先,运载器倾斜角度远远超过预期值,导致固体助推器分离时,飞行器的高度比预期高出约 10,000 英尺,这表明有一个偏斜力矩作用在飞行器上。第二个异常与轨道器的机翼载荷有关。本来飞行弹道采取了保守设计,飞行载荷只有设计极限载荷的 65%;然而,应变测量传感器显示机翼上某些区域的载荷达到了 100%的极限荷载。这两个异常效应出于相同的原因。在设计运载器时,要求进行风洞试验以获取飞行器的气动特性。为了试验的合理性,试验中使用固体推进剂模拟了推进剂系统羽流,以及作用在飞行器外形面上的大气影响。当时的羽流特性分析技术还比较简单,因此给出的结果并不准确。羽流流场的作用以及轨道器机翼、外贮箱和固体助推器之间的管流效应干扰作用,改变了翼体上气动载荷分布,产生了难以预测的气动力矩,增大了轨道器机翼上的载荷。图 4-13 图解显示了这些效应。最初没有人相信应变测量结果及气动压力数据,要求对所有应变计进行重新校准。校准结果表明,飞行中应变测量计的数据是准确有效的。许多人认为,应变计凹进太深导致给出了不准确的数据;然而,对该问题进行分析后表明,由于气动特性,飞行器上的确存在一个偏斜力矩。
图 4-12 STS-1 航天飞机发射图
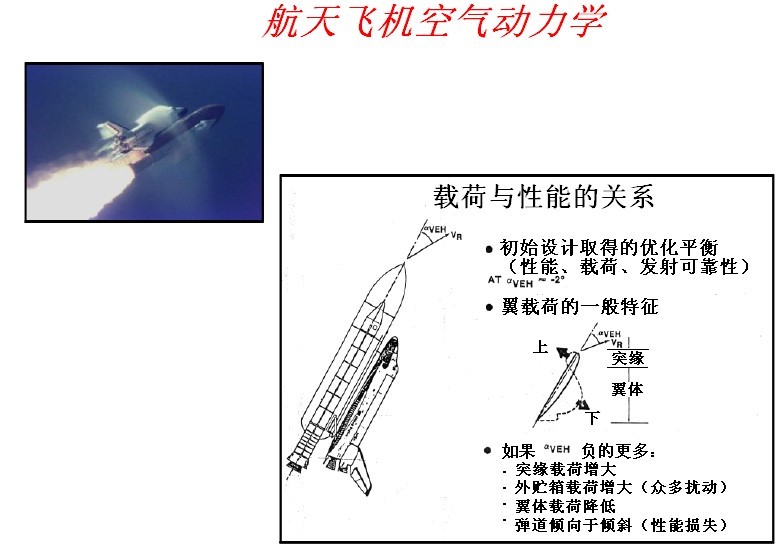
图 4-13 STS-1 航天飞机空气动力特性异常图
这个问题的解决方案很复杂。如果通过加强轨道器机翼来应对增加的压力,就会损失 5000 磅的有效载荷,并且发射时间要延期 2 年。另一个解决方案是飞行器的飞行攻角由原来的-2 度攻角改为-6 度,这将损失 5000 磅的有效载荷。采用这一方案,轨道器翼前缘结构需要进行小小的加强,外贮箱的突起部位也不得不重新鉴定以适应新的载荷。然而,即使采用了这些改进,最初的总结构能力也无法达到,要求发射当日通过测量发射前 4 小时的高空风数据以纠正弹道偏差。图 4-14 显示了原始的“动压头-攻角” 包络线,以及采用新的飞行方式后减小的数据。上述信息来自 ASFIG 会议报告和笔记,作者参与并进行了总结[Chaffe,1983]。

图 4-14 STS-1 任务航天飞机空气动力特性异常和解决方案图
航天飞机首飞中的空气动力学问题可以概括为以下几点:
- 航天飞机首飞(STS-1)数据表明气动载荷分布的设计是有错误的;
- 原因在于没有认识到固体火箭发动机和航天飞机主发动机羽流流场效应、主流的干扰作用,以及外贮箱和轨道器之间的管流效应;
- 用风洞试验数据预测了空气动力学特性,羽流形状和尺寸采用固体推进剂进行模拟;
- 如果采用不同尺寸的羽流外形对敏感性进行评估,问题可能及早发现。
- 解决办法:飞行攻角从-2 度调整到-6 度,改进机翼前缘附件以及外贮箱突起部位;
- 代价:5000 磅的有效载荷损失而且发射受飞行风限制。[或者可以重新设计机翼,但需要 2 年的计划安排,并增加箭体干重 5000 磅(5000 磅等效载荷损失)]
4.2 启示 4 的重要经验:
我们的组织和产品是高度复杂的系统,技术集成是其成功的关键。确定敏感性和不确定性是航天系统设计与使用的基本活动。
启示5:风险管理
“风险管理”——指导在自信下设计 风险评估贯穿项目生命周期的所有阶段 风险是可发展的,但是可控的:
- 技术[(人员、资产和环境)安全]
- 性能(需求、操作及可支持性)
- 成本和进度
方法包括:风险矩阵和概率风险评估 成功的关键之一是评估、认知和管理系统的各种风险。这些风险既有技术层面的也有计划层面的。决策过程规定必须根据系统的总风险作出决策。技术风险主要解决潜在失效模式、其发生的概率和严酷度。成本和进度的计划风险基本相似。技术风险对计划风险也有很大影响,因此必须考虑这些影响。风险评估和降低风险是主要的设计活动,风险评估必须贯穿项目生命周期的所有阶段。
5.1 风险概述
若存在可能会导致有害或不良后果的不确定事项,则存在风险。在航天硬件研制过程中,风险与有害最终状态出现的可能及后果的严酷度有关。在本文的第一个参考文献(参见[Clemens 等,2005])中,Blaise Pascal 在 1662 年提出了上述关于风险的定义。 风险评估和管理贯穿于设计过程的所有阶段,并在最后提供最终设计的置信度。风险评估事关识别和模拟潜在风险,确定其发生的概率及后果的严酷度、提出降低风险至可接受水平所需的改进措施等。风险管理是一个识别、分析、规划、跟踪和控制风险的过程。
考虑发生在设计过程中所有阶段的各类风险,可将其分为技术、成本和进度风险。技术风险重点关注的是安全(人员、资产、环境)和性能(要求、使用、保障)。风险评估结果是否可以接受通常是项目审查小组优先考虑的问题。风险评估和管理的应用使得项目可以集中在最紧迫的问题上。在图 5-1 中可以看出,其中任何一类风险都可能对其它类别的风险产生影响。

图 5-1 风险类型之间的关系
项目的目标就是平衡所有类别的风险,使它们尽量处于尽可能低的水平。图 5-2 给出了一个风险评估的分类,从中可以看出风险评估主要有两种方法,一种是风险矩阵评估,而另一种是概率风险评估(PRA)。
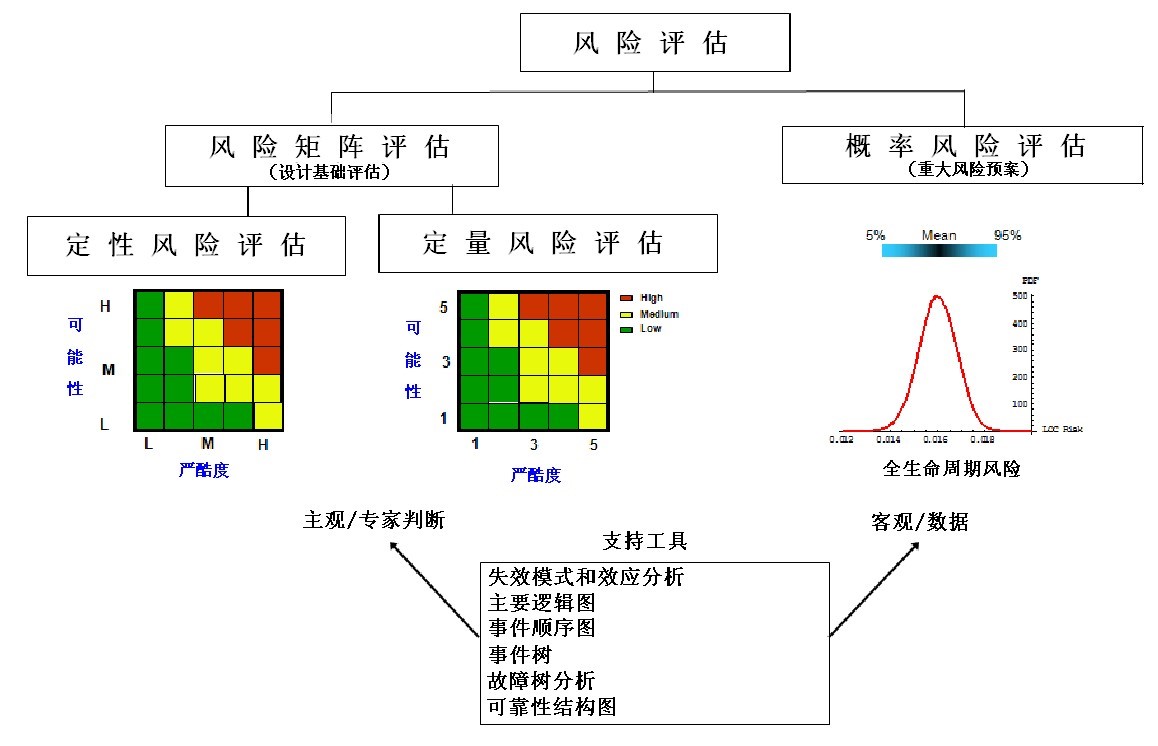
图 5-2 风险评估分类
风险矩阵评估方法通常适用于项目的 3、4、5 层面,主要目的是确定和评估相关技术(安全和性能)、成本、计划的不良事件,包括工程参与方和 S&MA 的不确定性。分析其可能发生的概率及其严酷度,然后由项目小组确定其优先处理的级别。这种方法创建于 70 年代中后期,到现在得到不断的完善,以适应其他领域的应用。
概率风险评估(PRA)方法通常被用于项目的 2、3、4 层面。这种方法通常用于评估发生概率低,但后果严重的事件,例如:人员的伤亡,飞行器损失或任务失败。PRA 的一个显著特征是评定风险级别的不确定性。如图所示,其评定结果是由概率密度分布表示的。这种方法在 20 世纪 70 年代早期评估核反应堆风险时得到发展。PRA 方法第一次应用于航天飞机领域是在 1988 年,人员伤亡的风险为 l/78(当前值是 l/80)。相比之下,Ares-1 成员伤亡风险是 1/2000。
5.2 实例
- 航天飞机固体火箭发动机(SRM)点火超压
- 土星 V 设备组件速率陀螺偏差
以上所列出的两个例子用于阐述风险,下面的讨论将集中在这两个例子上。
5.2.1 航天飞机固体火箭发动机(SRM)点火超压
在航天飞机的一台固体火箭发动机(SRM)点火时,内部总压的最大上升率约为 9000psi/秒(译者注:psi,磅/平方英寸,lpsi=6 890 帕斯卡)。当发动机热排放产物(燃气质量)被突然(0.5 秒左右即达到总质量流量,~l2000 磅/秒)排放进入一定容积的航天飞机活动发射台内,在主导流板、导流槽和侧向导流板上产生了冲击波。该冲击波近似半球形,振幅较高,反射到发射台后产生一个短暂的高振幅压力分布,进而引起运载器振动。
1975 年,大力神Ⅲ的一次飞行试验中出现了较高的点火超压(IOP)。在马歇尔航天飞行中心进行的声学模型试验也表明 IOP 数值较高,参阅[Jones 等,1994]。结构分析表明,该响应是可以接受的,(相关部门)随即作出决定继续发射 STS-1,并在第一次飞行后评估 IOP 的影响。STS-1 发射中,出现了一个高振幅的超压波,在其作用下,轨道器机翼、机身襟翼、垂直尾翼和乘员舱的振动响应都超出了预期。此外,轨道器反作用控制系统的氧化剂贮箱支架被压弯了。
航天飞机首次飞行是在 1981 年 4 月,第二次在同年 11 月。在这期间,付出了很大的工作量以降低点火超压的量级,同时对肯尼迪航天中心的航天飞机发射平台进行了大量的加固工作。在此期间,使用 6.4%的航天飞机模型先后进行了 40 次测试(见图 5-3),并确定了一项设计调整方案。最终确定用两项措施来降低点火超压的量级。第一项措施是采用喷水系统,水流正对着固体火箭助推器下方的两个轴向位置喷射,每台固体火箭助推器的总喷水量为每分钟 100000加仑。六个喷嘴安装在固体火箭发动机下方 22 英寸处,另外两个喷嘴安装在固体火箭助推器下方 140 英寸处。这些喷水设备的功能是将喷出的水与固体助推发动机排出的燃气进行混合,以削弱点火超压波。喷水的有效性单独显示在图 5-4 中。第二项措施是在导流孔的正下方安放一组 12 英寸深的水槽并充满水,这项措施用来阻滞发动机在活动发射台下方产生的反射波,参见[琼斯等,l994]。图 5-5显示了喷水系统和水槽。

图 5-3 声学模型试验设备——6.4%航天飞机模型图
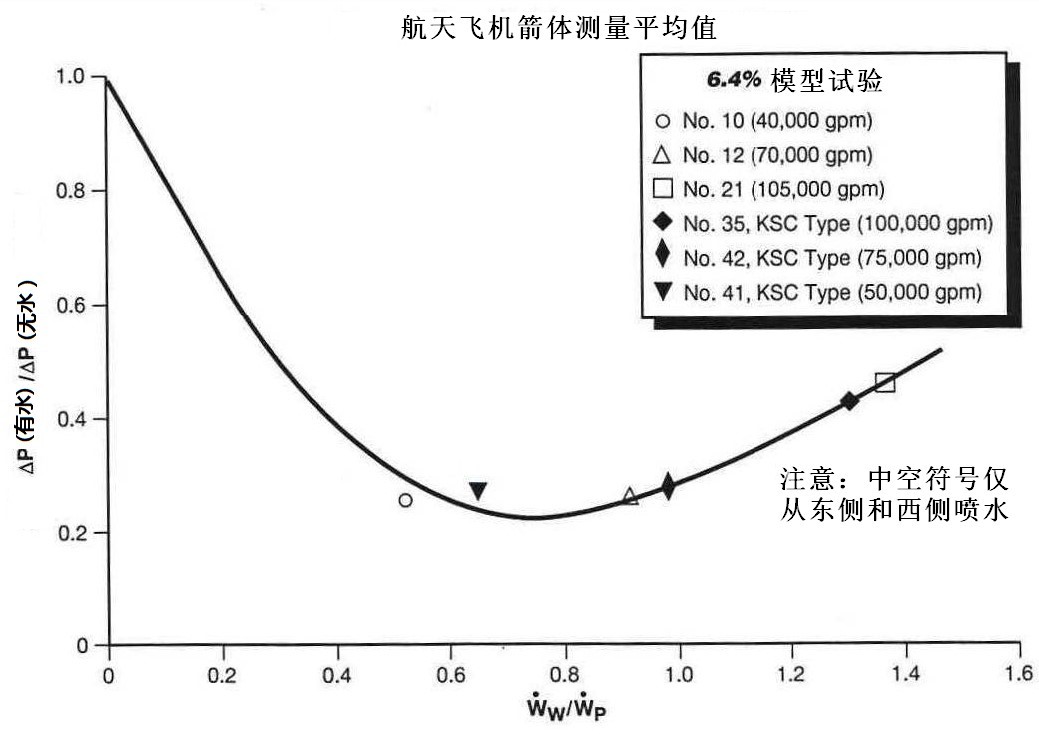
图 5-4 侧向喷水时,固体助推上的正冲击波峰值
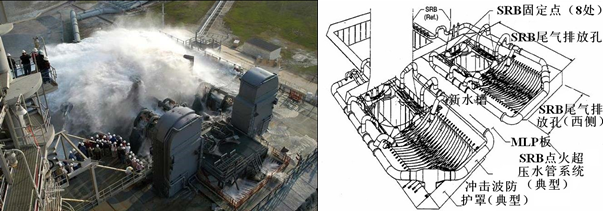
图 5-5 喷水降噪系统和活动发射台下的水槽
上面描述的起飞点火冲击波抑制措施在 STS-2 和后续的所有航天飞机飞行中得到了应用。图 5-6 比较了 STS-2(含喷水措施)和 STS-1(不含喷水措施)两次任务中,轨道器底部热防护层处的起飞点火冲击波形。
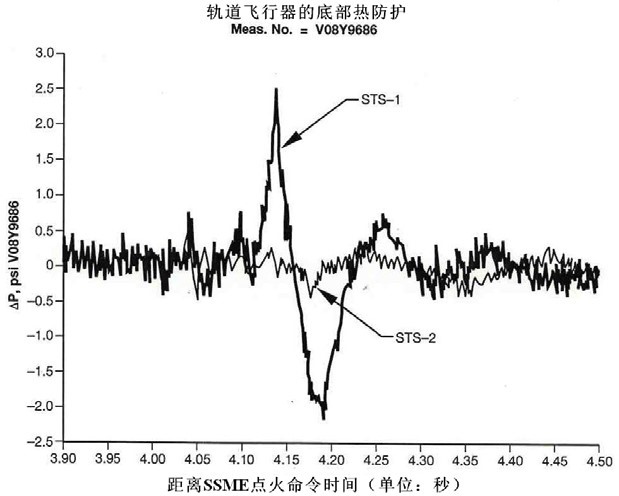
图 5-6 未采用抑制措施(STS-1)和采用抑制措施(STS-2)时航天飞机轨道器底部防热层起飞点火冲击波的比较
另外,图 5-7 给出了固体助推器起飞点火超压振幅峰值数据,表明了喷水降噪的效果。该图显示的是数据的趋势,是个近似的平均值。
图中有两组数据,一组是喷水之前的压力量级,另一组是喷水后的。可以看到,航天飞机外贮箱处,喷水前的最大压力值约为 2psi。模型实测值如此之高,是由于试验中固体火箭发动机未采用和固体火箭助推器同比例的缩比模型。不过,采取抑制措施后的试验数据表明,喷水不会对箭体的载荷造成严重影响。此外,采取抑制措施后的飞行数据也证实,抑制装置能够降低点火超压量级,且不影响箭体载荷。
这是一个典型案例:系统风险没能正确判定,必须在第一次飞行后才能发现。

图 5-7 SRB 点火超压图
5.2.2 土星V 设备组件速率陀螺变形
在土星/阿波罗号的研制过程中,弯曲、控制、载荷和气动弹性变形等相关的力学建模能力还不够成熟,这导致了飞行风险的不确定性。设计团队建议项目管理部门进行地面振动试验(GVT)以确定各种不定因素,并确定其模式。项目管理部门接受了这一建议并进行了地面振动试验。通过一系列试验发现,在速率陀螺位置处的设备组件存在较大的结构变形。
图 5-8 中,顺着速率陀螺仪,在其附近位置可以看见该设备组件。可以发现,在一阶弯曲模态频率下,服务舱(SM)和登月舱(LM)的载荷路径通过速率陀螺位置穿过了该设备组件(IU)向前的部分。其后果为,当火箭飞行时,这个位置的弯曲振动被速率陀螺感知并传送至控制系统参与控制,可能导致火箭动力学不稳定 [Ryan 等,
TM-78037,1980]。
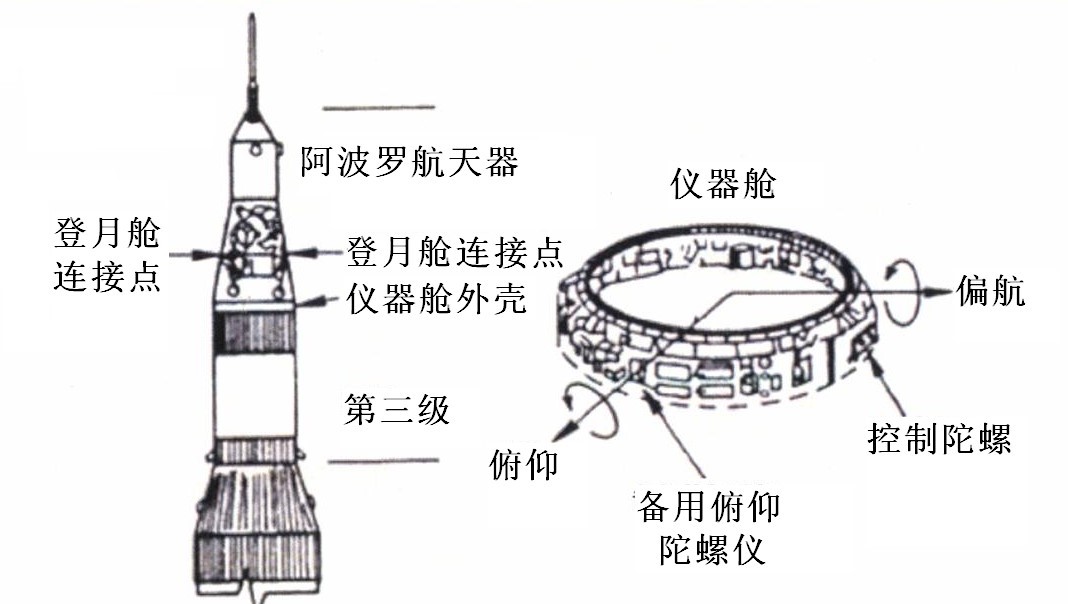
图 5-8 土星/阿波罗-设备组件图
图 5-9 是一个控制用速率陀螺的示意图,展示了速率陀螺位置处一个放大的变形。同时,从图中可以看见登月舱连接点(载荷路径),控制陀螺位于其下方。在变形位置,控制系统认为飞行器存在一个攻角,而事实上只是一个局部弯曲变形。此外,控制系统还认为飞行器作为一个刚体在此弯曲频率下振动。该速率陀螺被移至一个更合适的位置,使这个影响降低到了 1/3 的水平,进而解决了潜在的问题。

图 5-9 陀螺仪的安装和局部变形示意图
在这个案例中,风险得到评估并采取了适当的措施将其降低到了尽可能低的水平,即良性状态。
从这些案例可以看出,在项目的整个生命周期内,必须持续评估风险并进行管控。分析和仔细测试所有条件下的模拟状况对量化风险是最佳的。然而,仍然可能存在难以预测的风险。在这种情况下,未知事件应有预案!飞行中出现的许多异常现象往往表明存在潜在的问题。
5.3 启示 5 的重要经验:
在项目的整个生命周期内,必须持续对风险进行评估和管控。
启示6:所有的设计过程都充满矛盾,平衡无处不在
所有的设计过程中都充满着矛盾,因此需要平衡的艺术。因为存在矛盾,为了得到你想要的,你必须接受一些你不想要的。
所有的设计必须具有可接受的安全可靠性;
在这个约束下,必须在以下几个方面作平衡:
- 在设计功能和学科功能之间(进行能量再分配);
- 在项目需求、设计、制造以及使用方案之间;
- 设计过程中没有得到解决的问题,就必须在使用上采取折衷的办法来限制、补偿(例如,可能导致发射概率减少);
- 在成本、进度、性能以及与之相关的风险之间;
上述属性相互关联,改善一项的属性通常会对另外的一项属性产生负面影响;
平衡行为需要开放的沟通以及制定关键决策时的判断能力。
启示 6 是关于如何平衡系统中相互冲突的需求以及性能指标。我们通过权衡研究平衡各种需求/约束,最终完成设计。权衡研究减少设计方案中的差异性,并阐明航天系统强耦合性的本质。敏感性是完成权衡研究的指示灯,实现系统平衡的权衡研究的好坏,决定产品的成功与否。
David Pye 认为:“任何形式的能量皆能引起事物的变化;更确切的说,物质会产生再分配……现在,由能量传递产生的一个变化导致的结果是,对一组事物产生影响。事物往往相互关联,不会独立存在……你所能做的,只有在一定范围内控制各种变化的数量,这就是你通过设计能做的。”
“设计要求之间相互冲突而不可调和。对一个装置来说,所有的设计在一定程度上都是失败的,设计师或客户不得不选择这种失败应该达到何种程度以及产生在什么地方。”
“为了得到你想要的,你必须接受另一些你不想要的”[Pye,1969]。
因此,设计是矛盾的。结果是,我们应尽可能在冲突的需求中,使系统平衡到一个可接受的程度。由于发射系统具有难度大、性能要求高的特性,使得设计中的平衡工作特别具有挑战性。系统的各种性能属性必须平衡,技术性能、设施、项目成本和进度也必须平衡。因此,要求能够在载荷投送能力、系统健壮性、发射可靠性和使用复杂性之间进行权衡。设计过程中没有得到解决的问题,就必须以使用的妥协和限制来补偿。故系统风险知识对制定正确的权衡和平衡决策是必要的。此外,平衡过程需要开放的沟通和制定关键决策时的判断力。
要达到所期望的系统平衡,基本上每一级都需要进行权衡。图 6-1 是一个基于权衡研究的案例。每一个展示出来的设计功能中都有一些可选项,通过研究可以使其满足要求,并且可以在各自领域内进行权衡。设计功能之间以及设计功能和总系统之间都可以进行权衡。一个真正的权衡研究将带来更多的选择空间,这里只列出部分。

图 6-1 基于权衡研究的例子
图6-2说明的是,设计过程是一个平衡的过程,它在所有相互作用的要素中寻求最佳的设计平衡点。项目中所有的技术和规划都必须进行平衡。
6.1 实例
- 运载能力、弹道、控制、载荷、热环境之间的平衡
- 减载与性能之间的权衡
- 风补偿
- 土星 V 运载火箭减载权衡
- 使用性与飞行器性能
- 固体火箭助推器入水冲击/回收
- 飞行器可靠性与发动机可靠性的关系
(8)X-33 空气动力学特性和可操控性

图 6-2 设计过程的平衡活动
6.1.1 运载能力、弹道、控制、载荷、热环境之间的平衡
在飞行过程中的上升段,必须匹配一些飞行力学参数,以实现最大入轨质量、发射有效性、使用复杂性和系统健壮性之间的最佳平衡。这些参数包括弹道、控制、载荷和热环境(图 6-3)。基本弹道通过最大化入轨有效载荷质量得以确定。控制系统导引飞行器按照最优弹道飞行。从飞行力学角度来说,飞行轨迹越接近最优化弹道,入轨有效载荷质量就越大。然而,当飞行过程中遇到风时,若飞行器飞行时继续与最优弹道高度保持接近,将导致气动载荷较高。较高的气动载荷要求结构更强,因此结构也更重,从而降低了有效运载能力。我们可以通过降低飞行攻角以降低由于风产生的气动载荷。然而,这会导致轨道偏离最优弹道。所以需要进行折中平衡。另外,箭体在上升段的后期在大气中飞行时,飞行弹道会影响热环境,因此这些也是平衡时所要考虑的部分。
航天飞机是协调性和平衡性最高的系统之一。它是一种一级半构型、有翼的重复使用轨道器。这意味着它具有极高的敏感性,对无论多小的更改都必须重新评估。在诸多严格的约束条件下完成艰难的任务,其结果是,使用成本高昂,需要大量持续不断的投入[Chaffe,1983]。
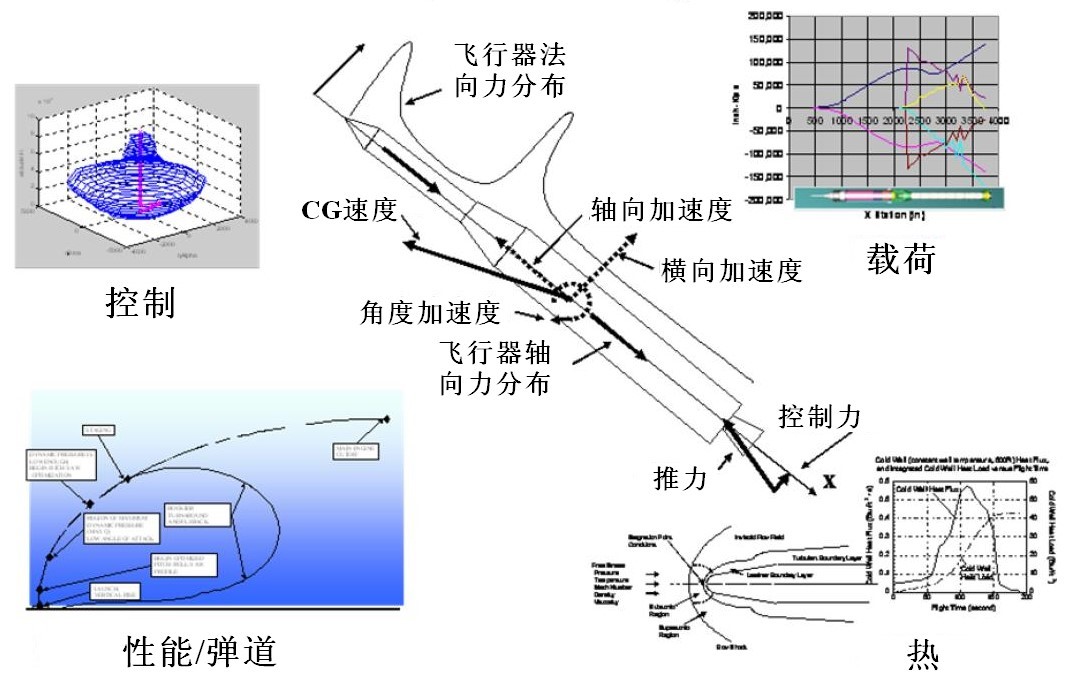
图 6-3 平衡性能、轨迹、控制、负荷、热环境
6.1.2 减载/性能权衡
通常,最好的平衡系统设计包括降低风引起的气动载荷,进而可采用一型较轻的箭体结构。减少气动载荷的技术主要有三种:风补偿、减载控制和模态抑制。图 6-4 总结
了各种技术的优点和成本/缺点。
|
方 法 |
优 点 |
成本/缺点 |
|
风补偿 |
刚体载荷较低,因此结构质量较轻或者余量更大,性能偏差小 |
操作复杂、成本高。 |
|
减载控制 |
刚体载荷较低,因此结构质量较轻或者余量更大,性能偏差小。 |
弹道偏离导致性能损失;控制系统复杂;增加失效模式。 |
|
方 法 |
优 点 |
成本/缺点 |
|
模态抑制 |
飞行器前部分弹性载荷降低,因此结构质量较轻或者余量更大,性能偏差小。 |
控制系统复杂; 针对要求的模态精度,需要进行地面振动试验。 |
|
风补偿 |
刚体载荷较低,因此结构质量较轻或者余量更大,性能偏差小。 |
操作复杂、成本高。 |
好的飞行器设计在收益、成本和健壮性之间取得最佳平衡
图 6-4 减载方法比较
风补偿技术是根据发生在某特定时间段(例如一个月)内风的预测值来设计补偿上升段的弹道/制导剖面。如果飞行过程中的风与预期一致,则飞行中的风载荷可以近似为零。当然,预计风与真实风总是存在偏差,因此仍然存在风载荷。风补偿技术使将要设计的结构能够承受预计的风,而不是承受在这段时间内所有可能出现的风。这种方法的缺点是操作复杂、成本高。后面将会有更多关于风补偿的讨论。
通过安装控制系统感知并降低风引起的气动载荷,被称为“减载控制”。虽然控制飞行器来降低气动载荷通常会导致偏离有效载荷优化的弹道,但采用“减载控制”对于很多飞行器设计而言,能够提升飞行器最重要的净有效载荷能力。然而,采用这种方法需要额外增加横向加速度计和减载滤波器,从而会增加系统的失效模式和操作的复杂性。
模态抑制就是使用控制系统主动抑制一些振动模态以降低强风引起的模态变化带来的载荷。这可以减少柔性飞行器前部的载荷,因此可以采用较轻的结构或给结构设计留有更多的余量。但是也带来一些系统复杂性,并且主动模态控制需要对模态特征有更精确的认知,这意味着可能需要开展地面结构振动试验。
好的飞行器设计通过考虑优点、成本、风险以及健壮性,从这些选项中找到最佳的
平衡方式。
6.1.3 风补偿
如前所述,风补偿是降低上升段载荷的一种手段。风补偿设计中所采用的风场时间周期需要进行权衡。参见图 6-5,我们可以选择以年、月或天(几个小时)为周期的统计平均风来进行设计。对于每种情况,都需要生成相应的弹道/制导参数并载入飞行控制计算机中。如果按照年统计平均风进行风补偿设计,可以保证弹道和制导参数能够适应年度发射需求。这种方式操作简单,但由于实际风场与年平均统计风场的差异比较大,对飞行器的强度要求高。按照月平均风补偿,需要载入特定的发射月的弹道和制导参数。由于一个月内风的变化远小于一年内的变化,实际风场与统计风场的差异变小,从而可以降低火箭的设计载荷。以此类推,我们可以测量发射当天的风并用于补偿。进一步减小风场差异性,则风载的影响范围可以缩减到对应几个小时内风场变化的影响范围,结构自然可以做得更轻。但是这样做必须测量发射当天的风,并据此生成风补偿弹道,最后将经过验证的弹道和参数载入到飞行控制计算机中,从而增加了每次飞行任务的操作成本。因此,决定选择哪种方式进行风补偿需要权衡(有关发射日风补偿技术的进一步阐述见启示 l7)。
如果风补偿设计是针对给定时间周期风场进行的,则飞行器必须在给定周期或更短的时间段内工作。举例来说,设计时采用月平均风补偿方式,则同时具备日补偿能力。这样可以保留一定的设计余量,以适应低载荷性能问题,增加发射可能性,或者提高发射的灵活性。图 6-5 说明了这个概念。
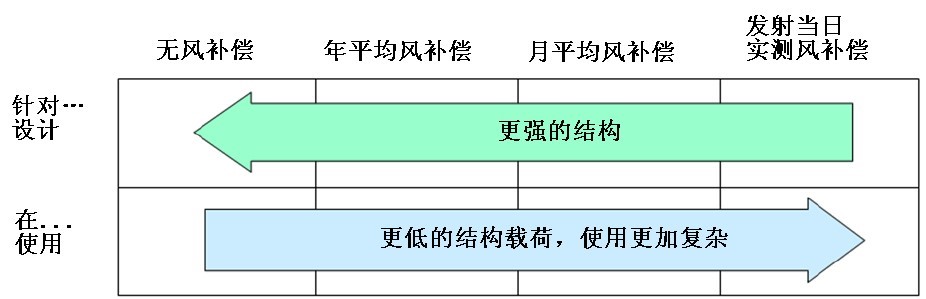
- 在当日的风补偿下使用具有最小的结构载荷
- “针对…设计”与“在…使用”之间的差异为有效载荷性能和/或发射概率之间的匹配提供余量
图 6-5 风补偿方式及其效果
土星 V 运载火箭和航天飞机所采用的风补偿方式见图 6-6。土星 V 采用无风补偿设计,因此具有非常强壮的结构。实际运行时,土星 V 采用月平均风补偿方式,因此, “针对…设计”与“在…下使用”点之间的差异获得了余量。这部分结构裕度连同推进系统裕度一起,为发射任务提供了很大的灵活性,并得以顺利完成月球车和天空实验室发射任务,这两次任务都是预期之外的。
航天飞机走了一条不同的路。相比于三级构型的土星 V,一级半的航天飞机需要相对更高的结构效率(重量更轻)。最初设计时采用月平均风补偿方式,但首飞时出现了预期外的气动异常(具体见启示 4),已经完成设计的飞行器强度没能达到预期目标,实际使用时需要采用发射日风补偿方式以减小其结构载荷。由于设计点和实际使用点之间没有余量,也就没有类似土星 V 的性能余量优势。

- 在当日的风补偿下使用具有最小的结构载荷
- “针对…设计”与“在…使用”之间的差异为有效载荷性能和/或发射概率之间的匹配提供余量
图 6-6 土星 V、航天飞机风补偿方式图
6.1.4 土星V运载火箭减载权衡
土星 V/阿波罗运载火箭开展了常规的权衡研究以确定使用减载控制带来的潜在优势。研究中,将火箭作为一个刚体进行模拟分析,结果表明,减载控制能显著降低飞行中的气动载荷。然而,在考虑结构弹性后,由于强风激发的弹性弯曲响应,火箭上部 1/3 位置处的载荷明显增加了,这一不利影响超过了刚体分析中主动减载技术给三子级中部带来的气动载荷降幅,因此土星 V 最终决定不采用减载措施[Ryan,R.1986,Geissler,
E.D.1970]。这个例子同时说明了,在权衡研究中采用精细化模型避免错误结论的重要性。
过去,土星飞行控制采用模拟滤波技术。如今数字滤波技术对输出加速度信号的弹性部件补偿效果已经大幅提升,因而可以很好地利用减载控制的优势而避免其弊端。
6.1.5 使用特性与飞行器性能
飞行器需要在最佳飞行性能和最大使用效率间进行权衡。如果仅以有效载荷性能或者其它的某一具体性能参数为目标进行优化,则该飞行器极可能对参数变化和扰动高度敏感。因缺乏健壮性,这类飞行器为确保安全使用,将耗费很大的代价和精力。历史上,我们以性能为目标进行系统设计,然后通过使用规程来控制风险和因基于性能设计带来的一系列问题。这种方式导致高昂的使用成本。所以,我们应该平衡运载器的各类性能参数,以提升系统健壮性、降低风险和使用复杂性。
6.1.6 固体火箭助推器入水冲击/助推器回收
决定回收和重复利用航天飞机固体火箭助推器的零部件是另一种不同类型的权衡
和平衡活动。整个决策的制定涉及许多技术和成本因素,最终基于损耗率的概率预测。上升段有效载荷投送能力与回收系统的质量(包括降落伞)有关。重复使用固体助推器需要研究回收方法论、机载系统、回收船和基础设施、整修和检验流程等[Nevins,1975]。
研究中的一个方面就是预测助推器坠入水中时水冲击带来哪些损害。水冲击载荷是固体助推器上主要载荷的来源,它的产生与几个事件相关,见图 6-7 和图 6-8。(1)初始冲击导致较大载荷作用在喷管和尾裙部上。(2)冲击时产生的空泡溃灭,而后水强烈冲击尾裙部。(3)最大深度的渗透段承受水压载荷。(4)固体助推器垂直浮起,然后突然倒下呈水平状态,产生了前部分的侧向载荷。这些事件中的任何一个都存在损坏硬件的可能性。
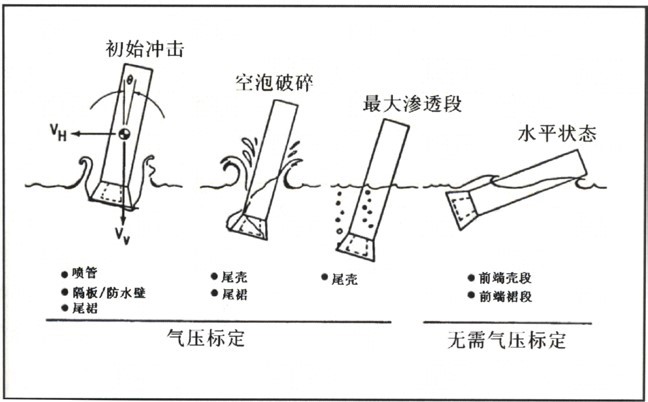
图 6-7 固体助推器水冲击载荷图
图 6-8 典型初始水冲击动态过程图
在回收系统研制过程中,开展了大量的缩比模型坠落试验,也进行了一些全尺寸试验。需要对降落伞大小和海洋状态可能性进行评估和权衡,同时进行经济性分析以评定回收和硬件重复使用的收益。结论是,助推器回收和重复使用在成本考虑上是有效的,前提是回收过程中硬件损坏率不超过 2%。因此,对于回收系统设计存在一个概率平衡点,或者称为目标值。最初希望不因回收而更改固体火箭助推器的上升段设计,只是被动接受回收过程中任何可能发生的耗损。但由于空泡溃灭效应实际产生的载荷高于预期,于是进行了加强后段的设计修改。一次回收中,一个降落伞触发装置出现故障,导致损失了一对固体助推器。此外没有因为概率界定变量,例如海洋状态、降落伞展开环境等,发生固体助推器的损失情况。固体助推器回收带来的主要好处是,借此具备了对回收件进行检测,并确定其后续使用条件的能力。事实已经证明,这些技术对确认实际的设计余量(例如热防护)并及早发现问题尤为重要[McCool,1991]。
6.1.7 飞行器可靠性与发动机可靠性的关系
另外还需要在飞行器可靠性、发动机可靠性、发动机数量之间进行权衡。这里我们用发动机可靠性换取飞行器整体可靠性,尤其是对于载人飞行器,希望具有发动机失效任务中止能力。如果每台发动机,无论规模大小,具有相同的可靠性,那么使用单台发动机的飞行器可靠性最高。但是单台发动机意味着必须具备更高的推力,而发动机的推力越大往往可靠性就越低。发动机推力越小,单机可靠性越高,但是多台小推力发动机的使用会降低飞行器的整体可靠性。图 6-9 对此进行了说明。图中的可靠性数据仅用于说明,不代表真实系统。作为一个额外的考虑,采用多台发动机的飞行器可以设计为允许发动机失效,以作为成员逃生或任务继续的安全措施。航空公司也广泛存在类似问题,多年来一直很难证明采用双引擎(发动机)替代四引擎(发动机)更具优势。只有当证据显示,发动机的可靠性已经获得提升,并且依赖单台发动机完成飞行任务的能力取得大幅进展,他们的新方案才会有市场。
系统可靠性与发动机可靠性关系的一些描述如下:
- 一般来说,飞行器采用的发动机数量越少,飞行任务中发动机失效的可能性越小。
- 但是,减少发动机数量需要提高单台发动机的推力,这将降低单台发动机的可靠性。因此,需要权衡。
- 当一台发动机失效后,安全中止任务(或者甚至继续完成任务)的设计能够明显增加乘员的安全/任务成功率。
系统可靠性与发动机数量的关系如下表所示。
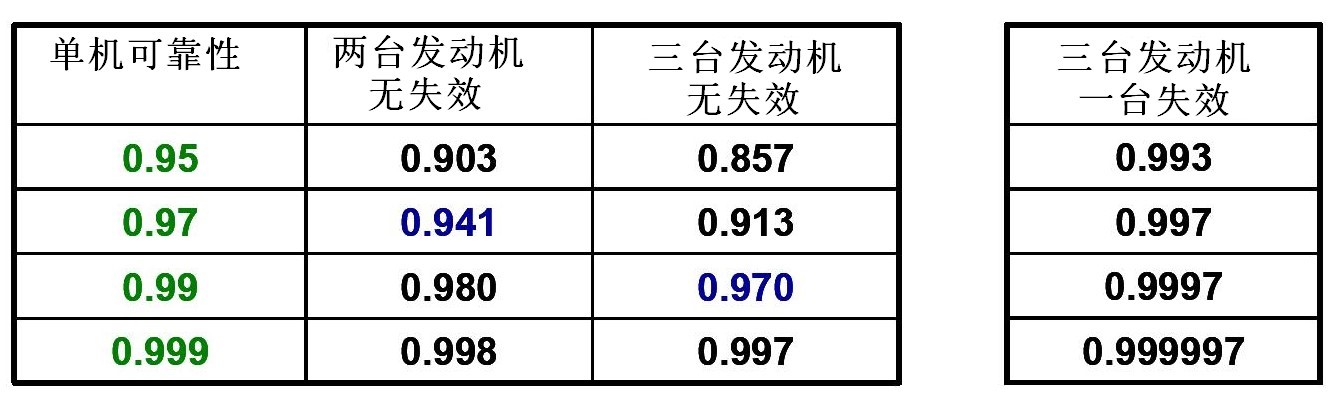
图 6-9 系统可靠性与发动机数量图
6.1.8 X-33空气动力学特性和可操控性
X-33 单级入轨飞行器的气动和可操控性平衡是一项重大挑战。作为单级入轨飞行器,X-33 不得不在上升段和再入段两种空气动力学特性间进行平衡。而上升段的操控能力和载荷与再入段以及着陆时的可控性之间也必须进行平衡。为了解决这一平衡问题,在 MSFC 风洞中开展了 1000 小时的风洞试验。在飞行器的研制计划中有接近 9 个月用以解决这组设计权衡问题[David,2001]
上面的示例阐述了设计过程所需平衡的多维特征。系统的所有方面都需要平衡:子系统、设计功能、学科功能、性能、各种属性、不同飞行阶段、生命周期成本以及其它。
6.2 启示 6 的重要经验
系统的所有方面都需要平衡: – 子系统 – 设计功能 – 学科功能 – 成本/性能/各种属性 – 不同飞行阶段 – 生命周期成本
准则 IV:系统遵循着物理规律
在本节中,我们将讨论基础的技术准则。这不意味着没有其它的技术教训,事实上,
(本书)后续的大多数经验教训都是与技术相关的。这里我们要讨论的是四个高层次的技术问题,它们对产品获得成功是非常必要的。针对这一准则的 4 个启示为:
-
问题的物理本质为最高主宰 8. 工程是一个逻辑思维过程 9. 数学是相通的 10. 运载火箭设计的根本是各类效率的平衡
启示 7:问题的物理本质为最高主宰
问题的物理本质主宰一切(大自然的力量),要么你屈服于她,要么你将失败。
“大自然并不阅读我们的论文,如果我们不遵循她的方式,她就会让我们失败”。
洞悉物理本质是至关重要的; 设计中采用不切实际的假设必然导致项目失败;
在使用之前,技术必须经充分验证。通过真实飞行来进行技术验证,将大幅加大风险和成本; 对于风险识别与风险控制,独立分析是很好的途径; 项目的成功,取决于技术特性的品质。
换句话说,如果你乐观地认为,设计产品可以绕开问题的物理本质,那么你终将失败。大自然的力量永远会获胜。因此,为了充分理解产品的基本物理特性,我们必须拓展、增强关键认知的方法。此外,除了一些必然的推断,我们还需要利用其它途径来强化我们的理解。标准做法是假设一些不切实际或过于乐观的需求。这些必然会受到挑战,从而引领我们回归现实。现在的趋势是,在新技术本身还不成熟或未得到验证之前,就将其推上起跑线(这是不对的)。在将技术应用于产品之前,应对其进行充分的理解,使其成熟并进行验证。技术开发与产品研发、制造并行是一种高风险的模式,是极不谨慎的。要确保对复杂航天系统理解透彻,独立分析和开放式调查是很好的方法。经验教训应当运用在产品的整个生命周期中。最终,技术特性的品质决定了产品的成功与否。
7.1 实例
- 航天飞机固体助推器尾裙部失效
- 太空实验室热防护层/太阳能帆板破坏
- 航天飞机主发动机(SSME)涡轮叶片开裂
- 航天飞机主发动机(SSME)输送管路的波纹管失效
- 固体火箭助推器(SRB)再入噪声
- 热影响
7.1.1 航天飞机固体助推器尾裙部失效
在对高性能发动机的结构试验件进行结构鉴定的过程中,当安全系数达到 1.28(要求值为 1.4)时,位于航天飞机固体助推器(SRB)的尾裙部结构发生了破坏。这导致多次飞行中,需要在装配之前为 SRB 尾裙部安装特殊装置以保证结构的可靠性。尾裙部结构的破坏是一个非常复杂的应力传递问题。在航天飞机自重及航天飞机主发动机推力的作用下,航天飞机产生了绕 SRB 外侧焊点的弯矩。在纵向载荷的作用下,由于 SRB 尾裙部的锥角结构,纵向力将分解为横向和纵向两个方向,导致尾裙部紧靠焊接位置的蒙皮结构弯曲、破坏,如图 7-1 所示。[Townsend,1998]
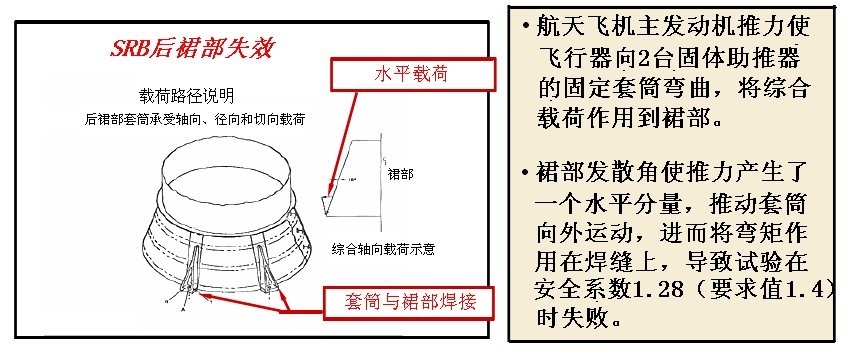
图 7-1 SRB 舱尾裙部焊接区域失效示意图
由该载荷引起的应力大小和分布情况如图 7-2 所示。下图为一个线性分析,分析结果仅表明应力的峰值,而不能表征其真实幅值。焊缝处的真实应力具有强非线性,需要通过非线性分析以及明确特殊材料特性才能对该问题进行深入了解。由于 SRB 尾裙部结构在试验中发生破坏,在后续航天飞机执行的 86 次飞行任务中,尾裙部处通过安装特殊装置以防止结构发生破坏。这就要求对每次飞行的载荷情况进行持续监控,并通过特殊的检查方式和分析手段来确保飞行系统的安全性。这项工作大约需要 5 个专职工程师来完成。后来,采取了一个在连接位置处添加固定装置的方案,不仅撤销了之前的特殊装置而且重新获得了设计余量。

图 7-2 SRB 尾裙部应力分布
7.1.2 X-33 不足之处
X-33 是一型单级入轨运载火箭(SSTO)技术验证缩比模型样机,其比例为预想的全尺寸 SSTO 的 40%。该项目旨在演示关键技术— 质量分数、金属热防护系统、整体成型复合燃料贮箱、塞式喷管主发动机、上升/再入段气动力匹配和控制系统,以及简易的低成本使用流程。热防护系统的验证需要弹道的马赫数至少达到 18。质量分数要求达到大约 0.9,这样才能够拓展到全尺寸(飞行器)。
主要不足有以下几点:
- 质量增长使得无法进入预期轨道,同时无法达到验证 TPS 所需的马赫数,此外质量分数也无法满足要求。 这与解决贮箱问题、气动力问题引起的质量大幅增加有关,同时限制了马赫数只能小于或等于 12。这阻碍了验证热防护系统的能力。同样的质量增加使得质量分数接近
0.85,因此无法推测出全尺寸的结果。
- 未实现气动和控制的匹配(在风洞试验中发现)。
在风洞试验中发现,上升与再入段的气动特性相互冲突,导致需要重新定位和调整倾斜尾翼尺寸。为了达成一个折衷方案,风洞试验花了 l000 个小时,然而结果以不佳的再入和着陆方式、更高的载荷和上升段性能损失而告终。
- 整体式复合材料燃料贮箱故障。
在验证测试中,整体式复合材料燃料贮箱出现故障,详情参见启示 18。这一故障最终导致了 X-33 计划下马。
7.1.3 重力探测器A-红移
如果一个旋转物体有内部能量耗散,它将重新定位到绕最大转动惯量轴自旋的位置(例如:一个长的圆柱物体会翻转成一个水平旋转体)。航天器 GP-A 在最初设计时围绕最小转动惯量轴自旋,并且内部有可晃动的流体(热控系统使用的氨)。这一问题在发射前被发现后,其内部元件被重新定位使之绕最大转动惯量的轴旋转。任务最终获得了成功。图 7-3 说明了这一现象,其中左图是物体围绕最小转动惯量轴旋转,处于非稳定状态;右图是物体围绕最大转动惯量轴旋转,状态稳定。

图 7-3 以最小惯量和最大惯量旋转的影响示意图
7.1.4 气动排气失效
在太空飞行史上,至少发生了三次类似排气事故,其中两次造成运载火箭损失,一次对有效载荷造成损伤。损失的运载火箭为 Atlas-Able-Pioneer(1959)和 Atlas-Centaur (1966),损伤有效载荷的为土星-天空实验室(1973)。这些事故的共同特征为:在跨声速飞行段均发生防护罩脱落。前两次事故源于对流动机理的认识不充分。当时防护罩设计目的为承受外部挤压载荷,但真实情况并非如此。实际上,防护罩在跨声速飞行时由于内压过大导致破坏。如果防护罩能够充分排气泄压,这两次失败完全可以避免。
土星-天空实验室任务的失败则是由于附加通道(太阳能帆板/防护板容器)泄压不足造成的。泄压分析是在假设通道尾端完全密封的基础上进行的,但生产出的通道尾端并不是密封的。通道尾端的缺口是技术集成缺失造成的。关键的密封设计要求,没有在气动力学、结构设计以及制造人员间得到充分的沟通和有效的传递,见[Lundin,1973]。此外,系统工程能力不足也是导致这个问题的原因之一。这些可以归结于当时还没有专职的型号主管进行抓总,因此设计过程中缺乏有组织的技术协调与信息传递、集成。
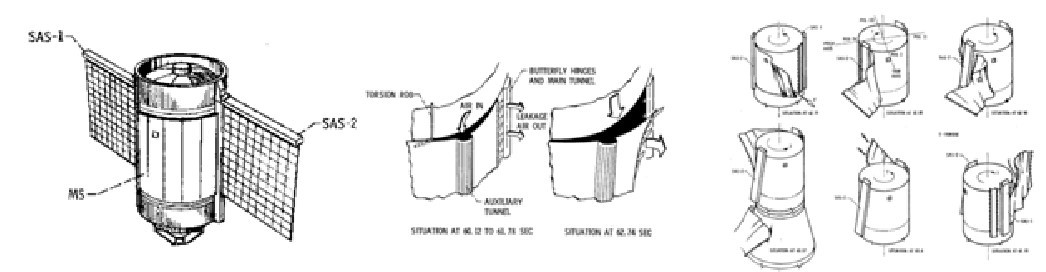
图 7-4 土星天空实验室太阳能电池阵列(SAS)
图 7-4 所示为天空实验室太阳能电池帆板阵列:左图为设计的展开状态;中图可看
到跨音速飞行段的内压造成了一附加通道的撕裂;右图显示的则是部分展开(实际状态)的空间颗粒防护板,该结构同时也是隔热板。尽管天空实验室没有损坏,但是有效载荷受到了损伤。最后,加装了具有热防护作用的遮阳装置,任务得以挽救。挽救天空实验室是个复杂的过程,需要两次出舱活动。地面和卫星照片都显示了受损情况,必须修复才能使用。太阳能帆板阵列中的一组被破坏,其它部分则被受损结构的碎片卡住。同时,防护板的破坏造成了生活舱内部温度升高。第一组宇航员用刀具切割释放了卡住的太阳能帆板,并携带安装了一个可以通过锁紧机构安装的遮阳伞对天空实验室进行防护。此外,释放卡住的太阳能帆板亦存在风险:由于帆板并未完全展开,当卡住部分被割断时,帆板继续展开可能对宇航员造成伤害。在完成补救措施后,第一组航天员启动了天空实验室的所有系统和阿波罗望远镜支座,并完成了部分科学试验任务。但是舱内温度仍高于预期,因此第二次发射任务又安装了一个更大的热防护装置:宇航员先从 ATM 出发沿着工作舱的方向安装了两个伸缩支撑杆,之后将一个更大防护罩安装在支撑杆上。新的防护罩可以代替以前的遮阳伞,并可以覆盖工作舱上方更大的区域,这样就解决了温度问题。剩下的问题是如何弥补由于缺失一组太阳能帆板造成的能量供给不足。这个问题只能通过后续发射任务规划逐渐解决,所幸后续发射任务均获成功。图 7-5 是第一次修复方案,图 7-6 是最终配置。
这次飞行任务的异常是技术集成和系统工程工作失败的结果。所有的设计要求在整个设计、制造流程中都没有得到充分交流和有效传递。在参考文献[Augustine,1983]中,作者列出了52条原则(被称为Augustine法则)。其中,第45条原则为:“我们预期的目标应该是预测到的所有的问题均可避免,而意外事件也应该被预测到”。

图 7-5 天空实验室最初采用的隔热装置
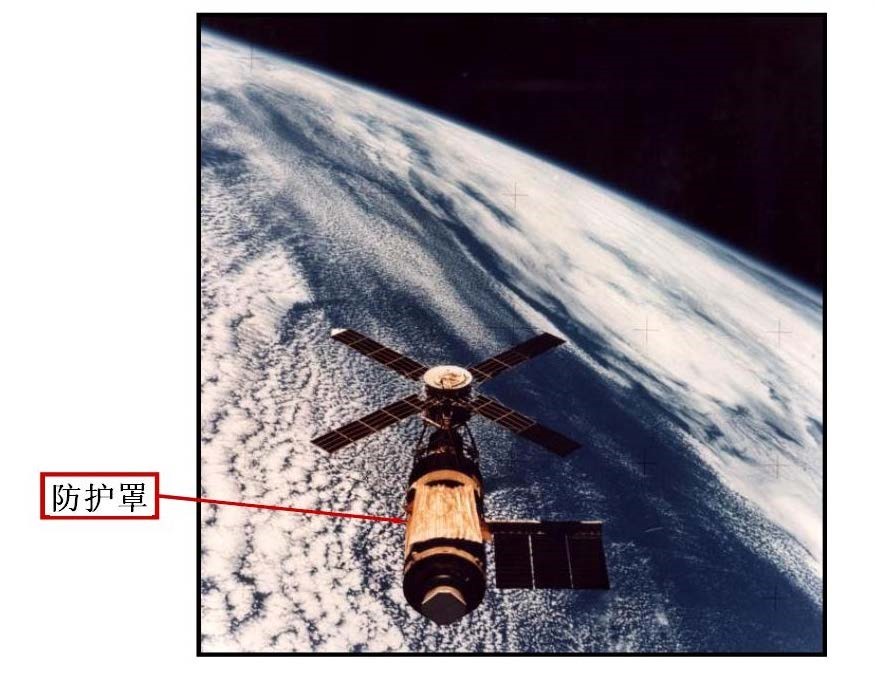
图 7-6 安装第二种热防护装置后天空实验室的最终构型
7.1.5 SSME疲劳问题
SSME 的高性能与高能量密度紧密相连,在前面的章节(关于太空旅行的挑战)中我们已经讨论过,其产生了许多的断裂和疲劳问题[Ryan 等,in Chaffe,1983]。高压涡轮泵涡轮叶片是一个经典的例子。在 SSME 方案中,有两种疲劳形式:(1)低周疲劳;(2)高周疲劳。低周疲劳是由低、高压力和温度循环引起的。最大工况下,温度为 1800R,关机时采用低温氮气吹除。带预燃室的燃料泵有 3 英尺长、750 磅重,转速 30000rpm,产生的功率为 70000 马力。每个拇指大小的涡轮叶片产生 550 马力。当涡轮旋转,燃气通过叶片时,在导流叶片的作用下会形成一个脉动压力。该压力引起叶片振动,并导致高周疲劳。
解决高周疲劳的方法是在叶片托板和叶轮之间安装阻尼器。在测试时,阻尼器上用来消除氢影响的镀金失效了,叶片阻尼器未起到作用。修补方案中取消了阻尼器上的电镀层。在航天飞机上的洛克达因泵运行期间,这个叶片没有发生其它问题。图 7-7 是燃料泵叶片,图 7-8 描述的是遇到低周疲劳问题的液氧泵叶片。低周疲劳产生的原因是叶片从非常高的工作温度到关机时的环境温度形成的热循环。裂纹发展现象可以通过检查、地面热试、50%先导原则的应用来控制。该原则说的是,所有参加航天飞机任务的零件,都必须首先在地面测试,两个状态一致的组件要进行两倍工作时间的测试。这条规则已经被应用到所有的 SSME 关键零部件中。
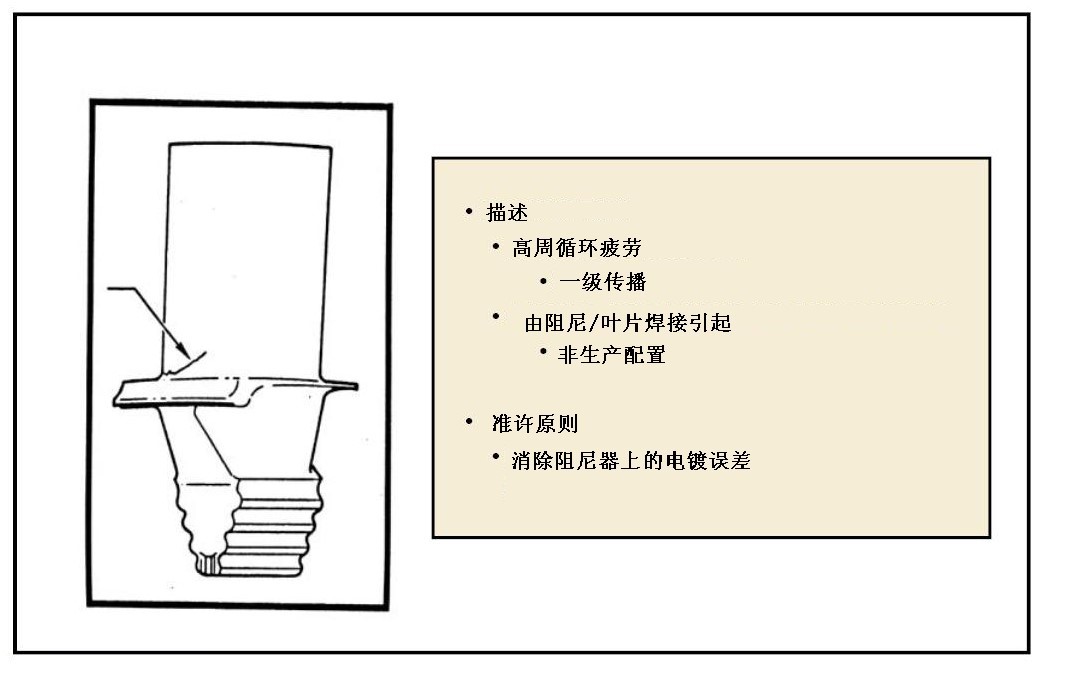
图 7-7 燃料泵涡轮叶片高周循环疲劳
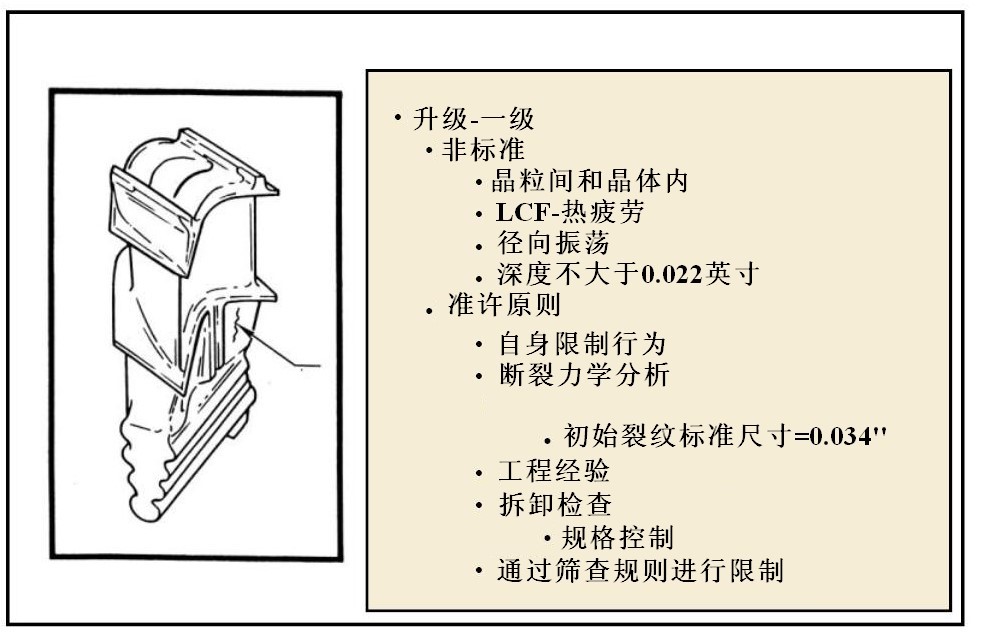
图 7-8 液氧泵涡轮叶片低周疲劳问题
为了解决叶片在极端环境中的工作问题,人们开展了大量的技术尝试,其中一些已经获得成功。多种材料被持续研究,其中单、双晶体增长的叶片也已经在研发并陆续投入使用。然而,在这些极端环境中工作,将永远是一项复杂而艰巨的挑战。敏感性、不确定性和风险控制使得各种缓解措施,比如 50%先导原则被制定以确保任务的成功与飞行安全性。
7.1.6 低压燃料输送管的波纹管失效
航天飞机主发动机(SSME)的低压燃料泵与高压燃料泵通过一个导管相连,该导管含有三段波纹管,如图 7-9 所示。这种波纹管设计能使 SSME 在静态试验和爬升飞行中实现摆动。
柔性接头采用的是柔性波纹管,其两端被牢牢地连接在管道上,内部采用了图 7-10 所示的万向三角架。推进剂流经万向接头会使其振动、疲劳以至断裂。
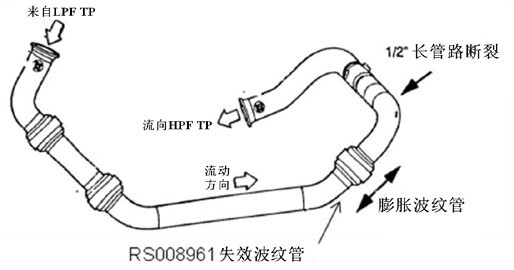
图 7-9 波纹管的弯曲连接图
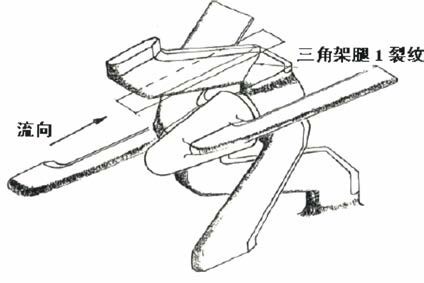
图 7-10 柔性接头内部结构关系图
在 2206 发动机静态试验中,RS008961 波纹管由于高周疲劳开裂而失效,该裂缝始于万向三脚架 1 号腿内。当三脚架裂开时产生了一个弹射力,该力向下游传递,压迫燃料管壁造成氢气泄漏,见图 7-11。
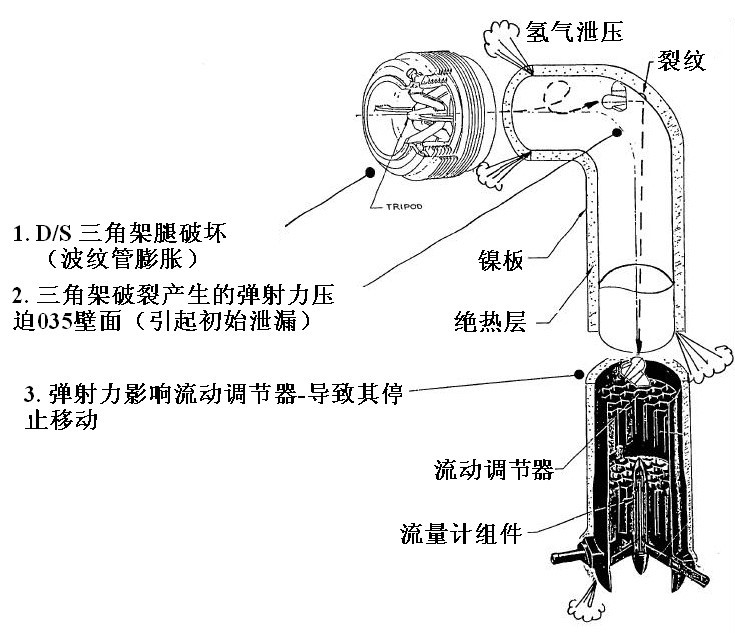
图 7-11 波纹管失效和管道破裂图
这根导管测试历程为:启动 90 次,热试 31853 秒,等效于 19.54 次万向活动循环。先导产品则经历了 36114 秒的热试。随后进行的调查表明,从倒角内部开始产生了疲劳裂缝。该故障产生原因在于遗漏了图纸上的一项设计要求。倒角半径明显小于图纸的要求。在故障位置,其截面被错误加工,半径小于要求尺寸。因此,误解图纸、不当的加工和检验程序共同导致了故障的发生。纠正措施包括对图纸进行修改(标明横截面积),以及对加工、检验程序进行修订,要求在最终装配、焊接时检查三角架的几何形状。由于此问题和其它的同类型故障,SSME 和航天飞机项目对于发动机零件采用了 50%先导准则,正如之前所述。这种方法非常成功,因为从此之后没有再发生 SSME 飞行故障。
7.1.7 固体火箭助推器再入噪声
SRB 在助推航天飞机后再入时,其弹道是随机的。再入马赫数 3.5 时,攻角的变化范围从 96 度到 180 度,95%的外壳动压头变化范围从 360 至 1020psf。在设计阶段,已经预测到喷管扩张段 189db 的压力波动,并且通过之后的风洞试验加以证实。最初认为,这么高的量级会严重影响固体助推器喷管。为了减轻不利影响,在远地点飞行时,喷管扩张段被切断。图 7-12 给出了马赫数 3.5 时无喷管扩展段的风洞试验结果。
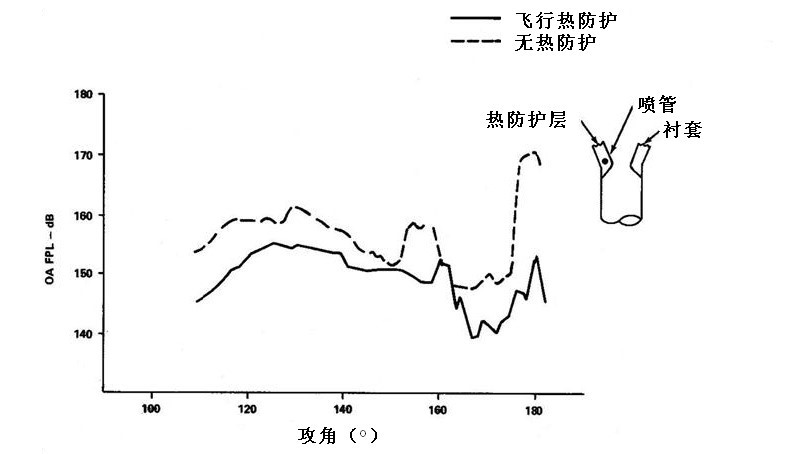
图 7-12 SRB 再入无喷管延伸段时的脉动压力水平
可以看出,没有喷管扩张段时,总的脉动压力量级(OAFPL)明显低于 l89dB。而有热防护时,OAFPL 的量级会有所降低。再入弹道、风洞试验和标尺的描述参见参考文献[Schutzenhofer 等,l979]。
高 OAFPL 对系统的影响还不清楚。设计人员决定在固体助推器上安装动压传感器,以此来测量带有喷管扩张段时的 OAFPL 量级。图 7-13 给出了喷管扩张段再入时的 OAFPL,噪音分贝值由时间函数的均方根值换算。曲线振荡变化源于攻角的振荡变化。可以看出,总声压级高达 l90dB,和预测基本一致。在风洞试验中,结果也是如此。不过,喷管上没有其它结构或电气/液压元件产生动态谐振。因此,尽管总声压级较高,但没有造成不良的后果。因此,项目组决定,在再入过程的不同时间段,对喷管扩张段进行相应调节。这个示例说明,未知的声噪事件是可以预测的。该项目最初实施了一个修正措施来减轻高量级脉动压力的潜在影响。但最后考虑到尽管总声压量级很高,但没有对结构和电气/液压元件产生不利影响,因此对修正措施进行了调整。
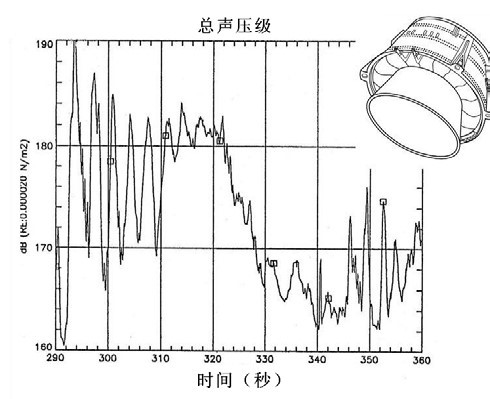
图 7-13 带有喷管扩张段时 STS 6 的 OAFPL 量级
7.1.8 羽流/主流热影响
在“木星”第一次飞行中,出现了飞行异常情况。箭体底部的燃烧导致箭体出现损坏。
根本原因在于洛克达因 A-7 碳氢发动机涡轮燃气的二次燃烧和冲击。
图 7-14 对比了木星 1 的两种飞行状态。其中,左图为飞行初期,火箭底部压力低于自由流静压(大气压力)。在底部看到的小股燃气流是涡轮排出的富燃燃气。主流(底部流)与羽流的相互作用并不明显。右图是箭体破坏之前的高空羽流和主流的照片。此时,底部流与羽流的相互作用十分显著。主流压力高于自由来流压力。涡轮富燃燃气被卷入主流中,重新被点燃,并在火箭底部区域进行二次燃烧,从而导致了箭体破坏。后来,设计人员在箭体底部增加了一个隔热屏以减轻火箭底部燃烧的影响。

图 7-14 木星 l 主流
图 7-15 显示了火箭在低空和高空尾部流场的比较。可以看出,低空时箭体主流压力低于自由流压力,气体被(负压)抽吸至箭体底部。然而,在高空时自由流压力低于主流的压力,箭体底部出现回流,羽流中的高温燃气回流使得底部热环境更加恶劣。
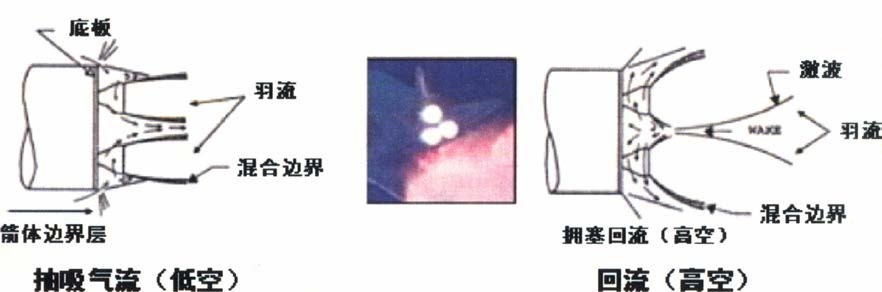
图 7-15 羽流影响的主流场
其它运载器也经历了羽流引起的分离流产生的显著影响。图 7-16 显示了航天飞机和土星阿波罗的羽流场。在航天飞机设计中考虑到了羽流影响,但是羽流的危害还是被低估了。载荷的低估导致以牺牲 5000 磅有效载荷的代价来弥补错误。在“土星”研制
中,羽流的尺寸和形状也被低估了,幸而对于箭体没有明显的影响。

图 7-16 航天飞机与土星阿波罗羽流图
7.2 启示 7 传递的重要信息
我们的系统遵循着物理学定律:你不能希望它不存在;你的分析不能离开它;你不能忽视它。
启示 8:工程是一个逻辑思维过程
工程是一个逻辑思维过程,而不是计算机代码简单组合。学会思考,用电脑来提高你的思维过程。
工程基于物理学定律和原理,因此,工程和工程设计是一个逻辑思维过程,在适当的约束条件下考虑各种可用选项。基本的技能要求是具备按照合乎逻辑的原则进行思考的能力。电脑、试验、分析都是工具,为人的思考辅以必要的信息,继而完成设计。在太空发展史上有很多例子能够用来说明这个启示。固体助推器尾裙部问题在前面已经讨论过了,这里讨论另外两个问题。
8.1 实例
- 土星Ⅴ晃动计算程序
- 空间站节点加固
8.1.1 土星Ⅴ晃动计算程序
在土星 V 的研发过程中,推进剂晃动是一个关键问题。当时,火箭、火箭控制系统和推进剂晃动分析工具都还在发展过程中。在使用早期的电脑费力地计算晃动动力学特性时,由于不断发现错误,程序不得不一再修改,这导致反复需要新的穿孔卡片并进行卡片组装。电脑操作员最后问 Robert Ryan:“如果你知道这个问题的答案,我们为什么还要运行程序呢?”他回答说:“如果我们不知道答案,我们就不会运行程序了。”换句话说,我们需要知道问题的物理特性,以便我们可以持续不断地检查计算机程序。计算机程序只给出你所要求的。这种检查采用简化方程,然后依据问题的基本物理特性进行封装计算。Helmut Horn,早期的德国管理者,会让你去黑板上写出所讨论的复杂实物的简化模型。他认为,如果你无法用简单的方式解释它,你就不理解它。他希望你能使用相同模型检查计算机结果或者甚至是检查别人的结果或表述。
8.1.2 国际空间站节点舱传力路径问题和通用停泊结构磨损问题
国际空间站节点舱(图 8-1)在研制过程中有两个主要问题。第一个是验证试验时对接舱口发生变形,第二个是通用停泊机构在停泊模拟过程中出现磨损。
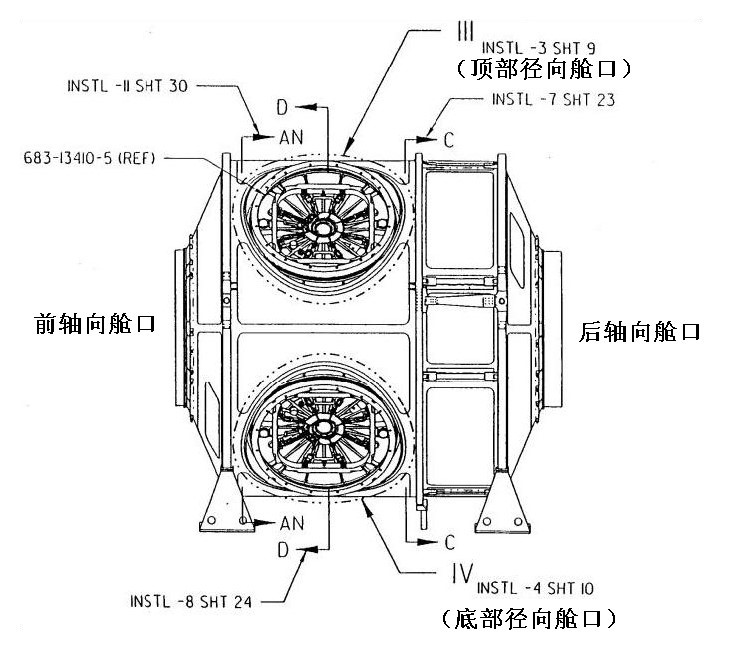
图 8-1 ISS 节点显示靠泊端口和扣板图
对接舱口变形问题发生在压力验证试验中,是一个典型的传力路径问题,该问题的发生源于在不理解基本传力路径的情况下,去设法降低结构重量,导致安装于对接舱口径向的两块筋板发生了周向应力集中。理解传力路径是结构设计的关键。Pugh 撰写的论文和著作中有专门的章节介绍传力路径设计[Pugh,1991]。传力路径是设计的基本物理概念之一,必须充分理解并贯彻于设计之中。
对接机构进行了充分的 5 自由度运动模拟试验,试验在 MSFC 的仿真试验室进行。试验过程中发现,由于无法预知对接的接触角度,对接机构存在发生卡滞的可能。这个仿真结果是基于在使用远程控制系统进行对接时,由于存在多连接角度,而无法确定被捕获体的位置的条件下完成的。然而,对接角度取决于远程控制系统如何捕获第二个物体,以及它相对于空间站的位置。一旦确认所有可能出现的运动状态(初始条件),问题就迎刃而解了。目前(问题已经解决),该机构在国际空间站任务中运行良好[Ryan‘s的工作报告]。
8.2 启示 8 的重要经验:
工程是一个逻辑思维过程,而不是盲目地应用流程和代码。
(1)批判性地思考(2)理解(3)解释
启示 9:数学是通用的!
对系统的物理过程来说,数学表达式(描述方程)是相同的,不同的是维度(单位)和边界条件。
通过以下几类数学概念可以阐述这一论述:
- 代数和几何
- 常微分方程(3)偏微分方程
自然界的各种物理现象都可以通过数学来描述,这是令人震惊的。更令人震惊的是使用相同形式的数学表达式,可以描述各种各样的、不同形式的物理现象。当然,代数和几何是一切的根本,常微分和偏微分方程也是基础。同一形式的微分方程可以描述各种各样的学科问题,我们只需改变系数和单位,就能够做到各学科之间的类比。这是模拟计算机的基础,我们中很多人用它来求解方程。这也意味着我们从原理上思考,而不是我们特意使用了这一类比方法。基本经验是我们必须精通数学的使用,同时理解观察到的现象中的差别。我们能够极大地使用相似性带来的好处,但是最后还是问题的物理特性决定一切。
启示 9 的重要经验
学习数学,它是所有分析和建模的基础。
启示 10:运载火箭的设计关键
运载火箭性能的挑战
运载火箭设计要点为: 推进系统效率
结构(不含推进剂的重量)效率 损失管理
运载火箭设计关注的是使有效载荷以有效、高效的方式进入轨道。设计并控制运载火箭需要了解系统的物理基础知识。本启示的目的是理解推进系统效率、结构效率和系统损失管理这几个基本的设计元素。正如启示 3 中所讨论的那样,克服重力使这一项工作非常具有挑战性。要完成任务,必须具有高效的结构、推进系统和损失管理能力,以获得一个平衡系统。下一节将讨论这些要点。
图 10-1 展示的是运载火箭设计中更多的基础要素细节。启示 3 中的讨论说明了太
空飞行的复杂性和挑战性。图 l0-1 总结了这些挑战的基本特征。需要强调的是:技术,包括推进和结构效率及损失管理必须与成本、进度以及各种属性协调平衡。为了降低成本及计划对技术的影响,在计划和技术之间平衡是一个主要的挑战。实际上,为克服重力等带来的问题,技术上要求设计满足所有的性能,使这个过程进一步复杂化。图 l0-1 描绘了一些代表特性,但还不是运载火箭三个设计要素的完整特性列表。需要注意的是,对于质量效率,通过管理质量分数、封装、热防护系统这三个单元可以获得总的质量效率。每个单元也有许多子系统,如质量分数包含结构构型、材料、载荷等等。推进系统至少包括发动机循环、比冲和发动机推重比。同样,每一个子系统可能又存在很多子元素。损失管理众所周知的子因素包括重力损失并扩展到各种环境条件等。我们正在尽力处理不确定性和相互作用。不确定性必须从一开始就清晰地定义其初始集合。而各种因素的不确定性随着项目生命周期进入使用环节后逐渐减小。系统的交互作用是非常复杂的,必须分析和控制,否则损失将非常惨重。在任何运载火箭系统中,交互作用认识不清是导致问题的主要原因。经典的问题包括颤振、旋转、弹动等,必须在系统之外专门开展设计。
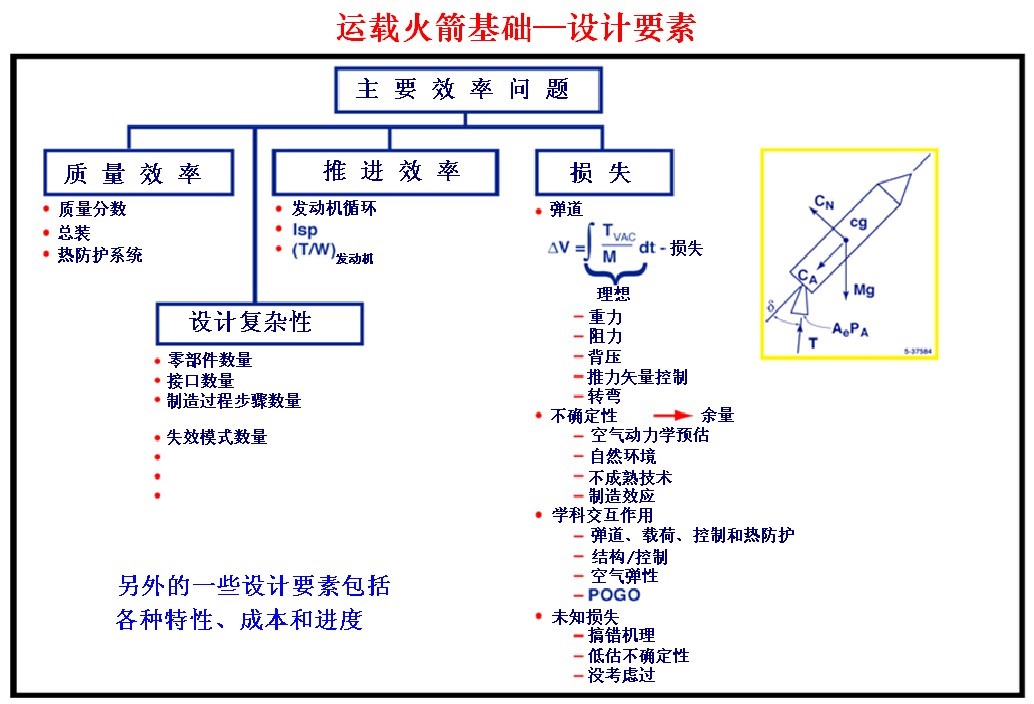
图 10-1 运载火箭设计平衡的关键元素图
10.1 运载火箭设计基本要素实例:
- 运载火箭的效率
- 敏感性与性能
- 质量增长时间历程
- 运载火箭构型的典型问题
10.1.1 运载火箭的效率
第一个示例是关于效率与计划平衡的概念,显示在下表中。早期的航天系统设计首先由性能驱动,然后对属性/计划进行评估。当属性/计划和前三个设计要素一起被放置在设计表上时,设计的平衡活动变得非常复杂。需要研究属性/计划与结构、推进系统等设计参数之间的功能关系。而这样的设计才是一种全面的系统设计[Ryan 等,l977]。举例,如果一个系统进行成本设计时没有结合其物理特性,那么将永远无法获得最小设计成本。现在,航天系统设计面临的一个主要挑战便是完成一个总的系统设计。这将在启示 l7 中进一步讨论。
挑战在于需要平衡下列两组关系性能 属性与效率 项目计划
-可靠性 -使用特性 -成本 -进度
-推进效率
-结构效率
-对损失的管控
10.1.2 敏感性和性能
完成设计使用的技术之一便是确定并量化系统对设计参数变化的敏感性。图 10-2 给出了一型单级入轨运载火箭的起飞质量对飞行器结构质量分数和推进系统比冲的敏感性。需要说明的是,为了界定问题,我们画了两条实际限制曲线。第一条是基于有效运行尺寸进行估计的总起飞质量,第二条是比冲的实际限制。比冲的上限为 460s,对于典型的液氧/液氢发动机,混合比为 6.0 时,实际比冲达到 453s。
正如所看到的,图中只有一条设计曲线位于限制线之内,即质量分数为 0.95 的曲线,
这样的值目前仍然无法达到。而质量分数为 0.9 的曲线,同结构效率为 0.89 的一样,对比冲过于敏感,不具有实际意义。该图说明了由于敏感性,单级入轨飞行器在目前技术条件下是无法实现的[Ryan 的工作报告]。

图 10-2 比冲和质量分数敏感性对飞行器总起飞质量的影响
图 10-3 给出了发射质量与初始设计时预估的设计余量之间的敏感关系。图中采用了三条不同曲线描述设计余量消耗与设计周期的关系。这个图仅为示意图,非真实数据。

图 10-3 运载火箭干重对干重余量的敏感性
10.1.3 质量增长时间历程
我们之所以使用干重余量,是因为实践已经证明,所有航天系统的质量伴随项目生命周期逐渐成熟而不断增长。下面列出了质量增长中的一些因素:
- 经验表明,航天系统质量不断增长
- 设计初期,余量必须考虑
- 科技进步可以改进质量预估
- 例如:运载器集成性能分析(VIPA)。
- 质量分类增长必须考虑
- 运载器干质量(运载器子级和有效载荷)
- 推进剂贮量
- 质量增长的主要原因:
- 环境的不当定义
- 子系统不当定义
- 技术成熟度(TRL)不如预期成熟
- 不确定性没有考虑或控制
- 其它未知因素
图 10-4 显示了在不同项目中质量增长历史数据库[Alexander 等,2002]。很明显,最初的设计必须考虑这种增长。而后问题形成了,什么是可接受的质量设计余量,额外的设计余量必须使用吗?目前运载火箭的设计中,新结构使用 l5%的设计余量,继承使用的硬件设计余量为 5%,另外分配 15%的余量,以覆盖之前讨论的质量损失,并且给
项目负责人储备一点余量以备不时之需。

图 10-4 航天系统的历史质量增长
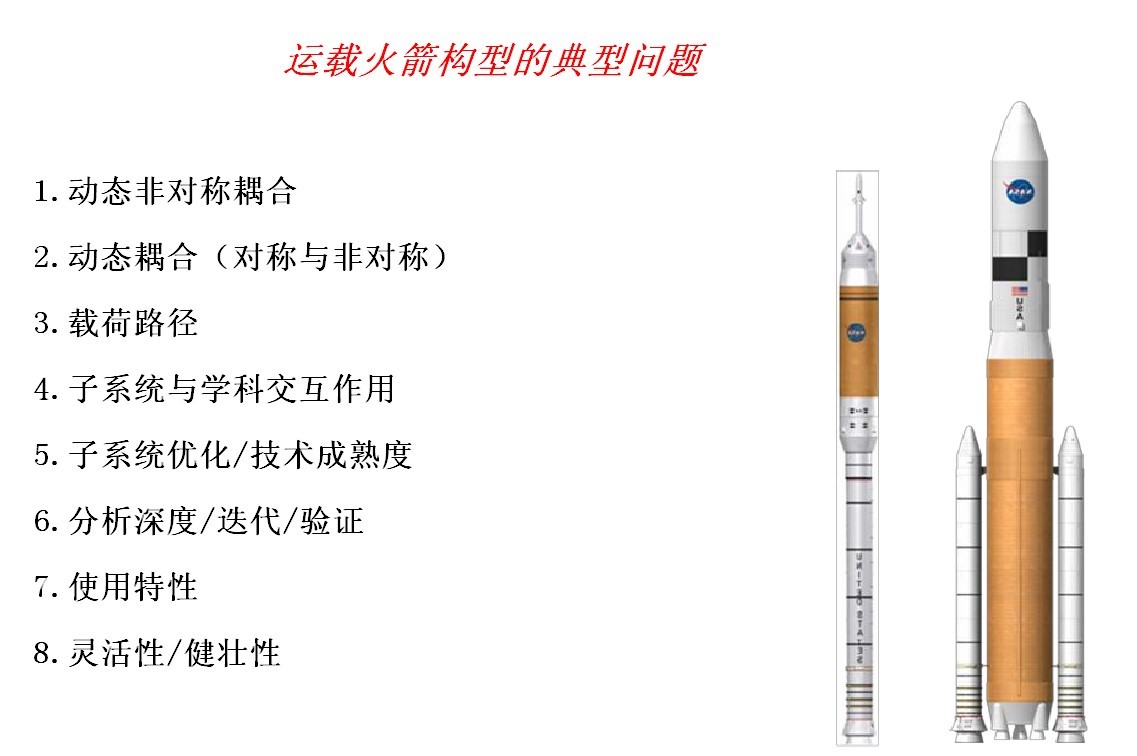
图 10-5 运载火箭设计中的其它系统层面的考虑
10.1.4 运载火箭构型的典型问题
图 10-5 展示的是其它设计复杂性清单,这些复杂性会引起质量增长并增加系统复杂性,这些因素必须要充分理解并在设计中综合考虑。任何多体结构的动态耦合对动态响应通常都具有较大的敏感性,如起飞、阵风响应,因此必须清楚地理解与描述。同理也适用于所有的载荷路径和非对称几何结构。子系统以及学科功能间的主要的相互作用是一些问题的关键驱动源,因此这些相互作用也必须描述,设计时考虑其可能性。有一个原则是:“一般而言,载荷路径越简单,系统越可靠”。每个要素在应用于设计前,其技术成熟度(TRL)应该得到验证。设计时优先考虑健壮性。分析的深度由系统的复杂性和敏感性来决定。
10.2 启示10的重要经验
设计挑战为性能效率、属性以及进度间的平衡。
准则 V:健壮性设计基于我们对敏感性、不确定性和裕度的理解
设计高能量密度的复杂系统时,总是存在顶层的需求、约束、基本规则以及假设,而设计即在此空间中完成。如何在这些因素中寻求平衡是对设计者的挑战。设计技巧包括如何应用敏感性、不确定性和裕度来实现最佳平衡的高可靠性设计。在通过改变设计变量来评估特征属性的变化时,敏感性分析是在众多方法中实现最佳平衡设计的关键工具。这是通过对敏感因子(偏导数)的理解来完成的。它使得设计者可以使设计迭代性地收敛,并且专注于对分析、试验和模拟的应用。不确定性适用于各个等级输入变量中的随机变量以及相应设计属性(输出变量)中的随机变量。这些变量存在均值,且取决于历史数据、试验与专家判断。裕度分析则适用于确定能力测量值与需求值之间的差别。在设计高能量密度的系统时,理解系统的不确定性并将充足的裕度应用到整个项目的各个阶段,才能实现设计的可靠性。以下是与该准则相关的启示:
11. 健壮性
12.必须理解系统的敏感性和不确定性
13.项目裕度必须足够大
启示 11:健壮性
实现健壮性的策略:
系统设计简易,部件数目、连接件及接口少等。
设计载荷路径简单的结构。
连接件设计的正确性。
解决问题或议题时,不要将复杂因素叠加,而是将复杂问题与简单问题放
在一起分析。
设计的目标是,在考虑所有需求和约束等因素的条件下实现最佳平衡的设计。与此同时,设计需要具有健壮性,其可以定义为:
(1)健壮的设计是,系统响应本质上对扰动不敏感。(2)健壮的设计是,系统响应可以对扰动敏感,但是处于完全可控的状态。
健壮性通过采用简易策略就可以实现。以下是一些策略的例子。比如,合理设计系统的简易性,最小化零部件数目、设计简易的连接件和接口等。航天飞机主发动机(SSME)的原型燃料涡轮泵壳体包含大约 469 条焊缝,其中 315 条是无法检测的,并且壳体部分采用金属片材料。轴承材料采用的是 440C 钢。在设计备用涡轮泵时,外壳采用了熔模铸造技术,消除了系统中的焊缝和金属片。轴承材料使用了氮化硅,转子系统的组件数目比原有设计的减少了一半。另一个设计目标是简化载荷路径。这样可以减少应力集中并使子结构得到加固,因此,结构质量也就更轻。另外,合理地设计连接件可以让载荷分散,避免载荷集中到一个不得不去加固的点上。最后,在解决问题时不要将复杂因素叠加;而是将复杂问题与简单问题放在一起分析。在解决 SSME 涡轮机械复杂设计中转子的动态不稳定性问题时,原先考虑的方法是对旋转组件进行加固,最后则采用了安装减震密封垫的方法来稳定系统,与其它方法相比,该方法显然是最简单的。
11.1 健壮性设计的实例:
- 健壮性的六个要素
- 土星 V 第一级和第二级的 5 个发动机
- 土星 V 的结构性能
- 惯性上面级(IUS)的健壮性
11.1.1 健壮性的六个要素:
- 裕度/公差设计
有时关于健壮性的普遍观点是“增加更多裕度”。在安全、性能、成本和进度不受影响的情况下,这样做是可以的。然而,在某些情况下,增加更多的裕度并不恰当,需要通过其它方式来完成平衡设计的目标。
- 冗余
冗余可以用加到系统中的航空电子设备链的数目来说明。举个例子,假设不存在由共性原因引起的失效,如果一条链的可靠性是 0.9,那两条就是 0.99,三条就会是 0.999。
如果一条链的可靠性是 0.99,那两条的就是 0.9999,三条就会是 0.999999。这个简单的例子说明了,通过冗余可以使系统可靠性达到不同等级。
- 简易性
简易化设计是精良设计中最重要的一个方面。举个例子,设计、分析、试验和使用都需要实现简易化。通过敏感度分析,可简易地实现平衡设计,不确定度评估也一样简易,并最终可以决定系统的风险性。
- 钝化对参数不确定性的敏感性
不确定性通常是指相对于平均值数值上的随机偏差。设计的输出属性受到设计输入变量和其它参数的影响。由于输入条件和参数中可能存在随机偏差,那么在输出变量中就可能会有随机偏差。对于小偏差,输出偏差大约等于敏感系数乘以输入的随机偏差(也包含带有随机偏差的参数)。这是均方根(RSS)方法的基础。由于存在一个乘积的关系(敏感度乘以随机偏差),通过降低敏感系数,也可以降低输出的偏差。利用这种方法可以在设计系统(输出)属性时实现偏差的决策、控制与管理。
- 控制参数偏差
在某些情况下,对参数偏差进行控制是很难的。举个例子,在大气风场中处理随机偏差的方式是测量发射日的高空风状态,并选择合适的条件发射火箭。在结构设计中,结构设计师采用容差控制的方法来实现压力和形变的控制。在电子设备中,电子元件的偏差控制可以通过筛选元件使其处于特定的容差极限内得以实现。在所有这些例子中,可以看到控制参数偏差对于成本有着重要的影响。
- 使用流程
设计的目标之一是让使维护和使用流程最为简便。一般来讲,可取的做法是减少系统清洗、电气系统检测次数,以及减少组件和零件的更换数量,减少流体的种类(早期的航天飞机包含了 11 种主要流体)等等。在航天飞机飞行的早期,涡轮机在每次飞行后都要进行拆除以更换涡轮叶片和轴承,其代价是每个泵 300 万美元。现在高压燃料涡轮泵的使用寿命是 3354s:这包含了一次验收试验和五次飞行。目前无需重新生产涡轮泵,因为余下的涡轮泵对于清单所列后续任务已经够用了。
上面六个要点以及其它一些要素是让我们能以最小的风险完成系统健壮性平衡设
计的重要因素。这些重要因素可以提高可靠性和安全性,同时降低成本,应当在整个设计过程和使用中被贯彻实施 [Ryan, R., AIAA Paper 93-0974, 1993]。
11.1.2 土星V第一和第二级的5台发动机
最初的土星阿波罗方案设计中,第一级(S-IC 级)由四台 F-1 发动机,第二级(S-II 级)由四台 J-2 发动机组成。后来考虑到土星阿波罗系统的重量问题,决定在第一级增加一台 F-1 发动机以增加裕度。这就需要在飞船上增加一个防辐射罩,第二级直径也必须相应地增加,同时还需增加一台 J-2 发动机。增加的第五台 F-1 和 J-2 发动机为没预料到的重量增加和后来的月球车以及空间站任务提供了裕度。
在阿波罗 13 飞行任务中,第二级第五台发动机失效并未影响发射任务,剩余四个发动机工作了更长时间来达到正确的入轨速度。
增加这些发动机是谨慎设计的一个实践案例,它为月球着陆、拯救阿波罗 13 飞行
任务、月球车和空间站计划提供了裕度。
11.1.3 土星V的结构性能
土星 V 的复合设计纵向载荷由图 11-1 给出,纵轴代表以英寸表示的火箭位置,横轴代表总的结构载荷。可以看到低处根据地面风设计(根据…设计是指参考了特定环境引起的最大载荷)。级间段和火箭的上面部分根据最大动压和攻角的乘积值(qα)设计,其余部分根据第一级关机状态设计。另外,安全系数也在图中展示出来。
这些载荷的设计策略包含了刚体和弹性体效应。这一策略在设计的早期阶段提出并且建立了载荷联合方程组,目的是达到载荷等于或小于 0.99865 的大致水平。土星 V 的刚体载荷策略包括:第一,95%的标量风速(最严酷月份),第二,RSS‘d(和的平方根)的 99%的大风区和风切边,第三,在所有响应参数上的 3σ 偏差,第四,无风时的偏差量。弹性体效应包括了 3σ 弯曲动态特性和湍流效应。在月平均偏差的飞行操作中设置了额外的裕度。
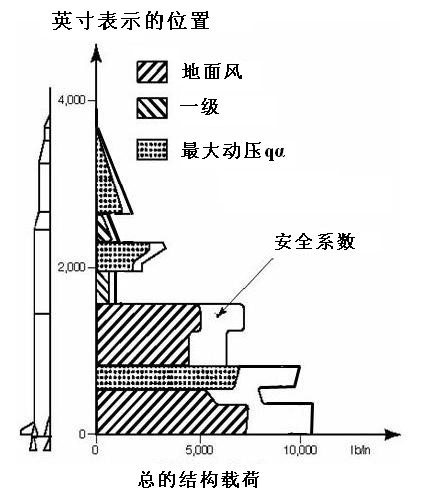
图 11-1 土星 V 综合设计中的载荷示意图
上图展示的策略提供了对载荷能力无影响的裕度,实际上,这使得土星火箭能够用于月球车和空间站计划。
11.1.4 惯性上面级(IUS)健壮性
惯性上面级是可由地面控制的高度冗余级。相较于早期航天飞机、大力神号等使用的助推器,惯性上面级可以将载荷(约 5000 磅)送入更高的轨道(地球同步轨道)。从 l982 到 2004 执行了 24 次任务:15 次是 NASA 的,9 次是国防部的。此外,它具有功能性冗余设计。图 ll-2 中也提到了几点其它的特性[Dunn,1984]。
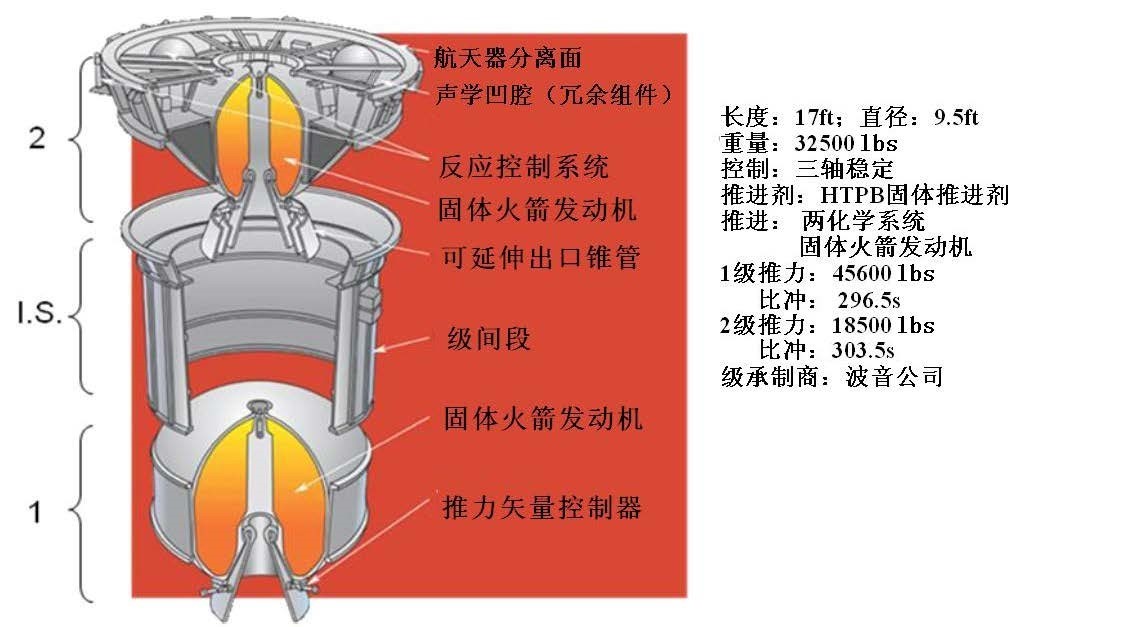
图 11-2 惯性上面级及其特征图
第一级将第二级和载荷推送至地球转移轨道,第二级则提供能量将载荷送入圆形的地球同步轨道。
24 次任务中有 3 次出现了事故。由于其可被地面控制及存在功能性冗余的特点,只有一次任务失败了。这三次任务包括了:IUS-2,IUS-1 和 IUS-21。以下只讨论 IUS-1 和 IUS-21 的经验。
1983 年,IUS-1 搭载在航天飞机 STS-6 中飞行,有效载荷为跟踪数据中继卫星(TDRS-1)。在 IUS-1 的第二级飞行中,喷管中的一个重要的密封件失效。喷管倾斜并被锁在了倾斜位置,并且控制系统失去了调控喷管位置以及控制整个系统的能力。由于喷管外廓大约有半圈被烧坏,IUS/TDRS 产生了翻转,进入了一个 13,579 英里×21,980 英里形状的轨道。翻转过程中,通过地面控制,将惯性上面级和卫星(TDRS-1)分离。
在两个月的时间里,为了达到预定的 22,300 英里轨道,共对卫星进行了 39 次机动,消耗了 64%的肼燃料。
图 11-3 展示的是第二级喷管的截面图。高温燃气从衬套密封件处泄露,密封件钛外壳过热导致密封件材料性能失效,结果在该压力下破裂,最终导致喷管向下倾斜。为了成功飞行,需要补救这一问题,因此取消了衬套密封件的螺钉连接,另外增加了密封材料的密度,去掉了表面的倒角[Chase 等,l984]。
下一个例子是 IUS-21。1999 年它搭载大力神IVB-27 飞行,有效载荷是防御支持计划-19(DPS-19)。起飞后大约六个半小时,当 IUS 进入地球转移轨道时,开始分离,两级还未完全分离时,第二级点火,系统翻滚进入了一个无法使用的大倾角椭圆形地球轨道[Brinkley 等,2008]。
图 11-4 示出的是第二级点火前、两级还未分离时的示意图。这次故障是由于一个电子连接插头没有及时分离从而阻止了两级的分离。

图 11-3 惯性上面级的二级发动机喷管截面图
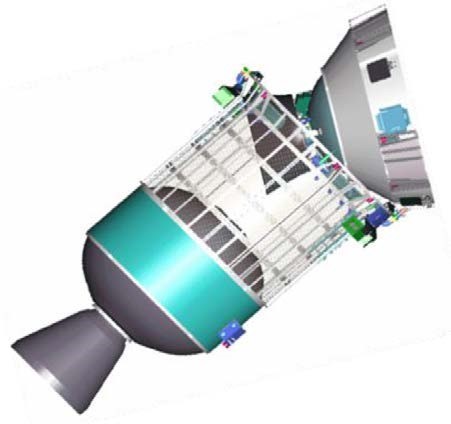
图 11-4 惯性上面级的第一级与第二级示意图
调查发现技术人员包裹的绝热带离插头太近,阻止了级间分离,见图 11-5 左图。技术人员按照 1978 年的详细操作流程(DOP)缠绕了绝热带。而 DOP 遗漏了与分离相关的特殊需求,只是说明绝热带需要在距离支架法兰 0.5 英寸之内开始缠绕。

图 11-5 电气线束内置和纠正示意图
DOP 的表述后来变更为:缠绕的绝热带与安装的支架法兰距离应控制在 0.5 英寸到
1.0 英寸之间,见图 11-5 的右图。
11.2 启示11的重要经验:
健壮性设计
(1)让系统对扰动不敏感或响应可控;
(2)设计中强调简化。
启示 12:理解敏感性和不确定性是必须的
确定系统的敏感性是通往成功产品的关键。
为达到平衡的设计,在设计方案选择时应深思熟虑(确保决策可行)。
高性能系统敏感性高,不确定性大,这使设计过程复杂(不能有小的变化)。
整个过程采用适宜的理念和规程把握敏感性和不确定性。
系统敏感性应当在概念设计阶段进行确定,并在整个设计循环中进行评估; 高敏感性需要更加注重设计细节,通过管理敏感性可以选择出最佳的设计方案,并且减少不确定性的影响; 需要确定与系统设计相关的所有输入/输出的不确定性; 设计必须减少不确定性,提供合适的裕度;
在设计的早期阶段,考虑到系统定义的不成熟性,应确保对特定飞行器敏
感性和不确定性的足够裕度。
在复杂的高能量密度系统的整个设计中,为了获得最佳的平衡设计,需要作出大量决策。敏感因子分析为方案选择提供了依据,从而达到最佳设计。举个例子,在液体火箭运载系统设计中,可以通过增加发动机比冲来提高有效载荷的质量。假设比冲提高 1s 就可以增加 400 磅的载荷,那么比冲增加 20s 就可以增加 8000 磅的载荷。因此设计人员可以决定需要增加多少比冲来满足有效载荷要求。在这个决策制定过程中,对发动机设计的影响将不得不连同其它间接交叉效应一起评估。上述例子中,敏感性因子已经通过系统性能分析得到。在其它情况下,敏感因子也可以通过试验或模拟得到。
高性能系统敏感性高,不确定性大,设计复杂。如果对火箭级和飞机的设计效率(功
率/质量)进行比较,可以发现火箭级在设计效率上要高 2 个数量级。如果与汽车做比较,火箭级的设计效率要高 3 个数量级。在不确定性方面,运载火箭设计中的一个复杂因子便是大气中风的不确定性。为解决这个不确定性,需要测定发射当天的风力状态,以确定是否满足飞行条件。
在设计过程中的所有阶段,必须对敏感性和不确定性进行确定和评估。这需要关注设计细节以评估最佳设计方案,降低不确定性的可能性。实际上,在某些情况下,不确定性可以通过降低敏感性来降低,不确定性还可以由历史数据库、试验和专家意见来确定。设计中的一个主要关注点是通过输入偏差的不确定性来确定输出偏差的不确定性。
用来评估不确定性的方法包括均方根法(RSS)和蒙特卡罗模拟法。
在设计过程的初期,为未知的敏感性和不确定性提供充分裕度空间非常重要。随着设计工作的推进,为了降低风险并获得设计自信,必须不断努力来理解敏感性,以期达到最佳平衡设计,降低不确定性。
下面是一个针对火箭发动机和结构设计的不确定性的概述。在火箭发动机设计中,高不确定性会导致巨额的研发成本。图 12-1 说明的是不确定性对高成本的影响[Havskj old,2004]。左图显示的是反复工作循环数(修正行为),它是各种子系统技术不确定性因子的函数。随着不确定性的增加,反复工作循环数相应增加。不确定性产生于静态和动态流场中,诱导因素有载荷、瞬态热效应、温度梯度、高的泵转速,以及焊缝等等。右图是研发时间与研发成本的对应图,可以发现 73%的研发成本都用在了修正行为(试验失败修正)上。在 SSME 的研发过程中,出现了 38 个重要的故障,每个故障耗资都超过了 3 千万美元。
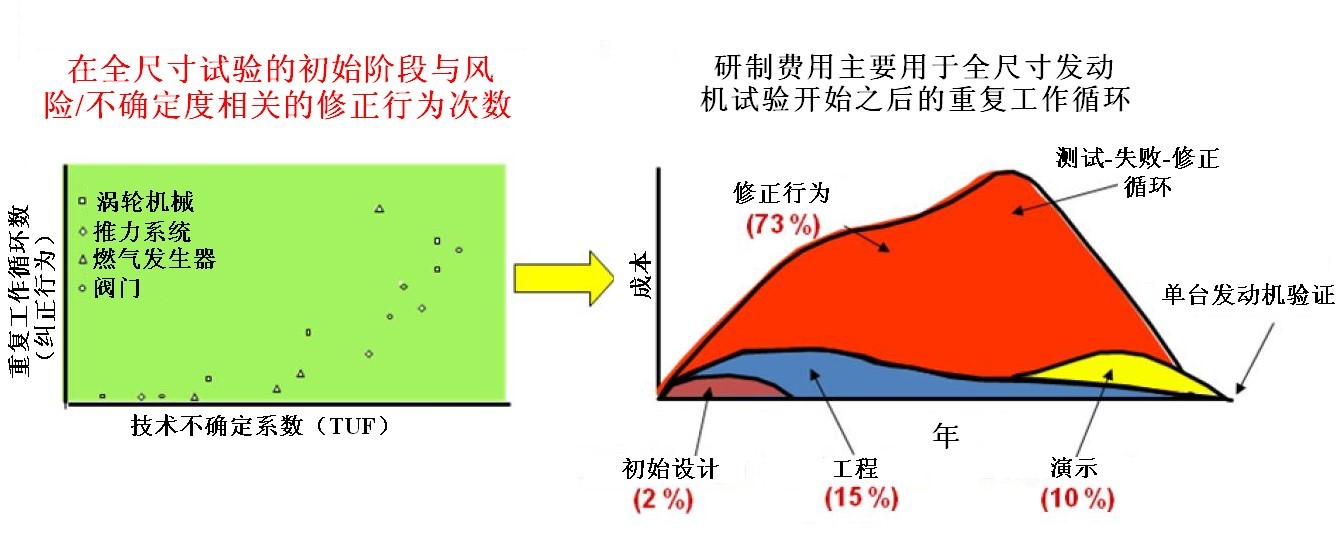
图 12-1 技术不确定性导致高成本示意图
从图 12-1 的经验中可以学到什么来改善不确定的影响呢?图 12-2 是一个示意图,告诉我们如何能够通过降低不确定性和改善过程来降低研发成本。

图 12-2 低不确定度和改进的工艺共同作用降低成本示意图
图 12-2 表明,当不确定性降低时,修正行为就可以随之减少,同时借助过程改善,修正行为的花费也会改善,其实际效应就是降低成本,研制出合格的发动机。不确定性可以通过降低由静态、动态流场引起的载荷来减少,例如降低燃烧室压力和扩大流动面积。另外,不确定性还可以通过降低泵转速、改善环境条件等来减少。过程改善可以通过减少焊缝数、应用摩擦搅拌焊、高静压焊接、减少零部件数量等来实现。总之,通过建立我们的经验数据库(如图 12-2 所示),借助各种新的设计技术,将来有望大幅降低研发成本。
结构设计的不确定性如图 12-3 所示。图片的中间是工作应力和材料许用应力的概率密度函数(PDF),失效发生在重叠区域。这个例子中,设计过程已经考虑了所有的失效模型,其中主要关注的是强度。右边概率密度函数的随机变量确定材料许用应力,而应力由左边概率密度函数的随机变量来确定。了解这些概率密度函数的关系后,设计可靠性便可以确定。在示例中,由于如图所示的重叠区域有点大,设计是不可接受的。我们可以采取很多措施来改善这种装况。可以通过降低载荷或改变几何尺寸来降低平均应力。通过限制载荷的不确定性、改变公差、改进焊接质量等方式可以降低不确定性。选用强度高、不确定性少或两者兼备的材料可以改善材料性能。
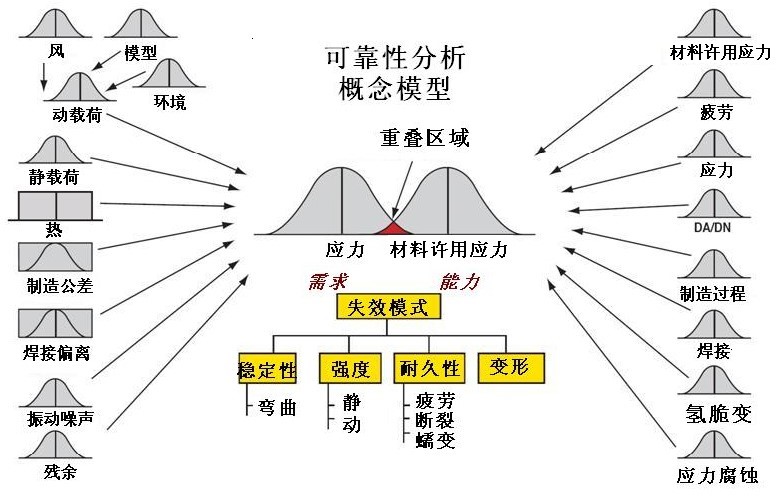
图 12-3 结构设计中的不确定性示意图
敏感性和不确定性在高能量密度复杂设计中扮演着重要的角色。敏感性为实现最佳平衡设计和辅助减少不确定性提供了深入的了解。了解不确定性,可以为评估风险和增强设计信心提供一种手段。通过对已有经验教训的理解和学习,以及应用新的设计工具改进设计,有望在将来降低设计成本。
12.1 敏感性和不确定性实例:
- 土星 V 固定杆
- 航天飞机起飞载荷
- 替代涡轮泵振动
- 太阳能帆板昼夜频率交替飞行试验
- 航天飞机参数不确定性矩阵
- 固体火箭发动机(SRM)推力室和 SSME 节流阀(放大流量或节流)
- 固体火箭发动机(SRM)万向支架连接摆动喷管
12.1.1 土星V固定杆(起飞载荷)
出于安全性的考虑,在初始飞行阶段,在火箭释放出发射架之前,要求所有液体发动机在满推力下,并且各项性能指标正常。为适应这一需要,发射架需要采用具备足够强度的大型机械装置牵制火箭,抵御起飞时的推力作用,另外还需留有一定余量。因此,土星 V 第一级的总推力(750 万磅)作为应变能量(势能)储存在结构中。当所有发动机工作正常时,火箭从发射架释放起飞升空。释放的能量产生了一个巨大的结构动态响应,显著地增大了火箭第一级的载荷,也增加了其它各级的载荷,为了应对这些增加的载荷,结构质量就需要增加,因此火箭性能会有所损失。为了减少损失,发射架采用了一个缓释机构,如图 12-4 所示,该机构包含了一个锥形螺栓,是通过火工品切断的。发射台通过小直径的衬套安装孔来牵引这个锥形螺栓,缓慢地释放能量,降低了约 30% 的载荷。总结如下:
- 火箭从发射装置(平台)起飞之前,发动机启动,并处于满推力状态以确认发动机工作正常。
- 发动机工作产生的推力能量贮存在箭体推力结构和其它结构内。
- 贮存的能量突然释放会产生巨大的动态响应。
- 土星 V 采用了缓释机构以降低载荷的动力学响应。
- 释放机构是一个通过下图所示孔口的挤压螺栓。
- 箭体尾部的载荷减少超过 30%。
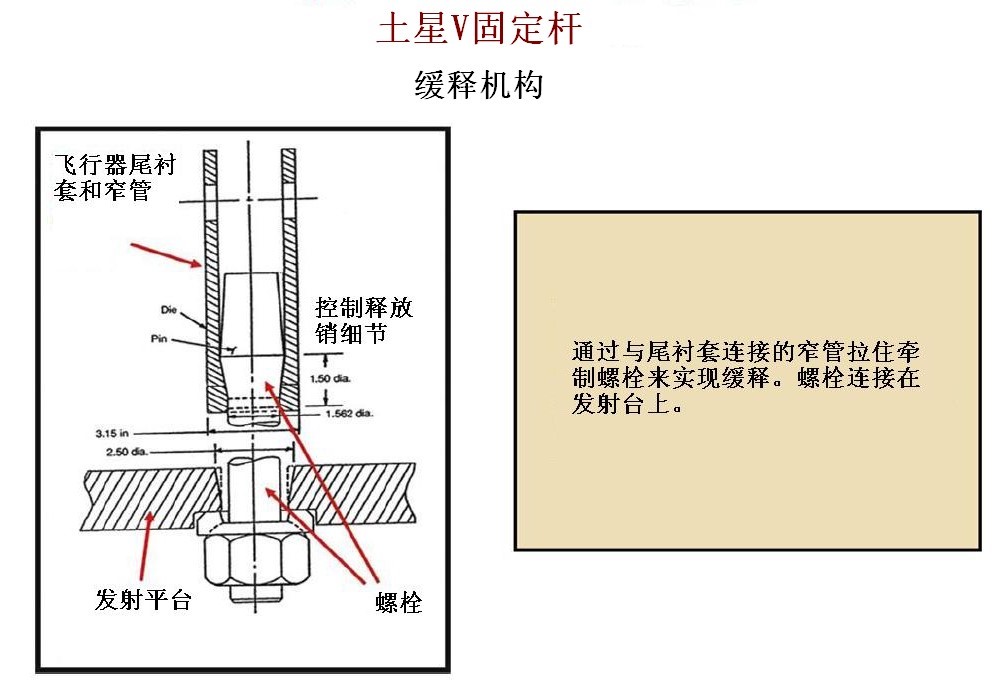
图 12-4 土星 V 牵制释放缓释装置示意图
12.1.2 航天飞机起飞载荷
航天飞机有着类似土星 V 的需求,而动力学系统更复杂,并且有一个非常敏感的性能问题,因此必须使结构质量尽可能最小。航天飞机是一个五体结构系统,通过接口(被称作支撑结构或连接装置)连接。由于轨道器连接在外部贮箱和固体火箭发动机的一侧,因此箭体在偏航面上是非对称的。航天飞机通过每个固壁上的四个火工品螺栓固定在活动发射平台(MLP)上,见下图。飞行器首先加注低温液体推进剂,这使外贮箱长度和直径收缩。举个例子,加注推进剂前,尾部固体助推器与外贮箱连接装置的连线与垂线有 7 度的偏离,在外贮箱加注后由于低温收缩,连线与垂线重合。另外,它的直径也收缩了大概 2 英寸。这些能量贮存在结构中,在发射架起飞阶段的一开始,航天飞机主发动机点火,并达到 90%推力以确保发动机工作正常。主发动机质心和航天飞机中心线之间的偏离有几英尺。这将以两种方式将附加能量贮存到结构中。轨道器向上运动时,飞行器沿着支撑连接处弯曲,系统中产生了一个较大的扭矩。这个可以通过观看航天飞机发射视频形象地说明:飞行器发射时,观察可以发现,外贮箱顶端向横向偏移了大约 36 英寸,发射架上的飞行器发生了动态位移。这是由于主发动机不在中心线上,其推力对轨道器和处于两台固体火箭发动机之间的外贮箱具有推动作用。而飞行器正是通过两台固体火箭发动机固定在发射架上,因此相应产生了位移[Ryan,1996]。
在固体助推器连接螺栓释放所有这些贮存的能量时,会造成一个大的复杂的动态响应。四个分体的交互作用再加上有效载荷体,共需要大约 300 个弯曲模态来模拟响应以及计算所有的系统载荷。在分离时刻,两个附加力加强了动态响应,也就是加大了载荷。推进剂燃烧产生的 960psi 的内部压力导致固体火箭发动机膨胀。这些压力在发动机点火后的 500 毫秒内从 0psi 增到 960psi。发动机点火后,喷流具有巨大推力,当喷流通过平台下方的导流槽时产生强噪声,噪声经反射还会影响到上方的箭体。由于航天飞机是一个一级半飞行器,对性能要求很苛刻,因此为了减少结构质量,必须降低高强度的动态载荷。
如上所述,航天飞机主发动机在启动和增强时的推力造成了一个动态的横向位移,
如图12-5所示。飞行器往回运动到一个最小位置时,存在一个最小能量点,此时如果飞行器从平台起飞它将承受最小载荷。如图12-6所示,贮存的弯矩与时间相关。因此决定,航天飞机主发动机点火2.5s,这超出了判断各项功能是否正常的时间,这样极大地降低了载荷。从航天飞机主发动机验证时间延迟到最小能量点起飞,飞行器的性能有所降低,但是载荷冲击造成的声压级减小了。图12-7给出了预测的起飞响应与实际飞行响应的关系。

图 12-5 航天飞机起飞动力学示意图
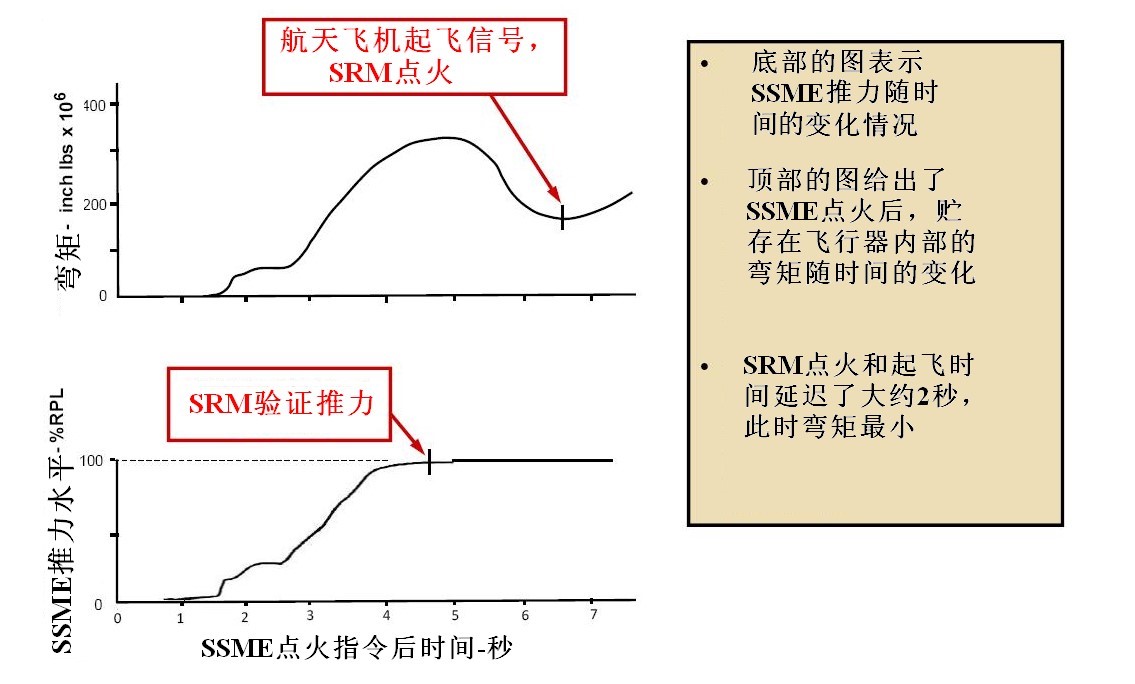
图 12-6 航天飞机起飞时序图
在图 12-7 中可以看到贮存的载荷和最小能量释放点之后,跟随的是上面讨论的大的动态响应。图片反映了外贮箱到固体火箭助推器支撑结构的载荷响应。预测值和实际飞
行值之间的差别是由于预测时采用的是 3σ 条件,而飞行时的条件接近名义值。
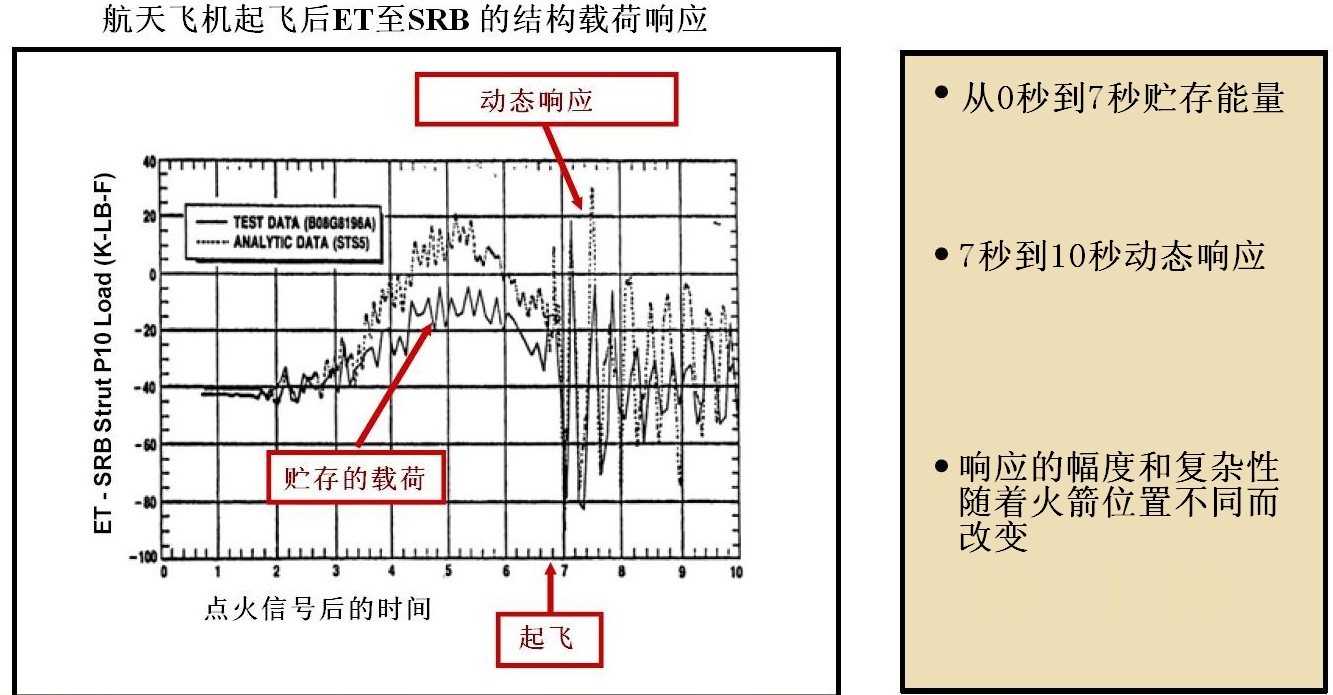
图 l2-7 航天飞机起飞载荷图
这两个例子说明了如何理解一个系统的不确定性和敏感性,从而获得较好的系统性能。总结如下:
- 由于非对称结构,当航天飞机主发动机的推力使轨道器向上移动,并推动轨道器和固体火箭助推器之间的外挂贮箱时,航天飞机结构中贮存了附加能量。
- 该能量使贮箱顶端向横向偏移(36 英寸),并使固体火箭助推器与发射架之间的连接硬件扭曲。
- 起飞时的结构响应是极其快速和敏感的,如果构型或操作参数有小的变化,
载荷就能改变 30%。
- 为了使起飞时系统贮存的能量最小(能量由发动机推力产生),起飞信号延迟了大约2s。
- 起飞延迟损失了约 1000 磅的有效载荷质量,然而,比起没有减轻载荷前的设计状态,起飞时载荷冲击带来的影响大幅减小了。起飞时刻的载荷敏感性要求进行载荷分析,并且对每次发射任务中的有效载荷进行验证,结果是使用复杂。
12.1.3 替代液氧涡轮泵振动问题
SSME 在高压涡轮泵上升级了一个组件,以消除与原涡轮泵相关的大部分破裂和疲劳问题,这些新的涡轮泵被称为“ATD”泵(涡轮泵新型替代泵)。在 ATD 液氧涡轮泵的研发试验中,泵经历了可能导致实验失败的、剧烈的同步振动问题。下面的泵测试曲线和结构示意图(图 12-8)显示,出现的响应瞬间激增到了很高的水平,几乎导致试验终止。在花了大量精力试图减小水力学作用力之后,解决方案转移到轴承死区。泵的响应非常敏感,以至于死区改变 2mils(一英寸的千分之二,比一页纸的厚度还要薄)就能使振动消失,而反过来修正 2mils 又会出现振动。这就对泵的组装提出了严格的制造公差要求。
通过对这一敏感性的理解,之后在多次的航天飞机飞行中,泵都没有再出现此类振动问题。[技术攻关小组工作笔记,Ryan 等,l994]。
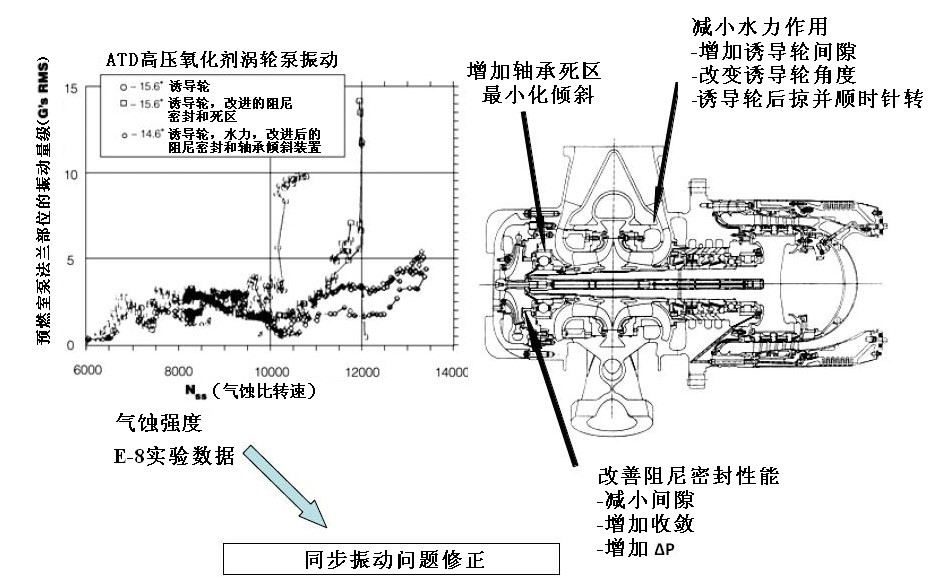
图 12-8 备用 LOX 涡轮泵振动修正总结图
12.1.4 太阳能帆板飞行试验(SAFE)的昼夜频率转换问题 太阳能帆板飞行试验有两个目标:(1)研究一种太空中大型航天结构的动力学测试方法;(2)评估一种太阳能新设计的效率。图 12-9 示出从航天飞机货舱中伸出的太阳能帆板。实验中当飞行轨道经历夜-昼变化时,太阳能帆板的固有频率发生变化,这是没有预计到的。变化的原因是热效应导致太阳能帆板收缩或膨胀,改变了它的转动惯量。图 12-10 可以看到,在轨道的夜间部分,太阳能板翘曲。尽管热对结构的影响众所周知,但是没有预料到在这种大型结构上会有如此大的影响。这一教训再次说明:要理解和量化敏感性。这一实验非常成功地展示了在太空中大型结构的力学试验是可行的[Schock, 等,1986]。
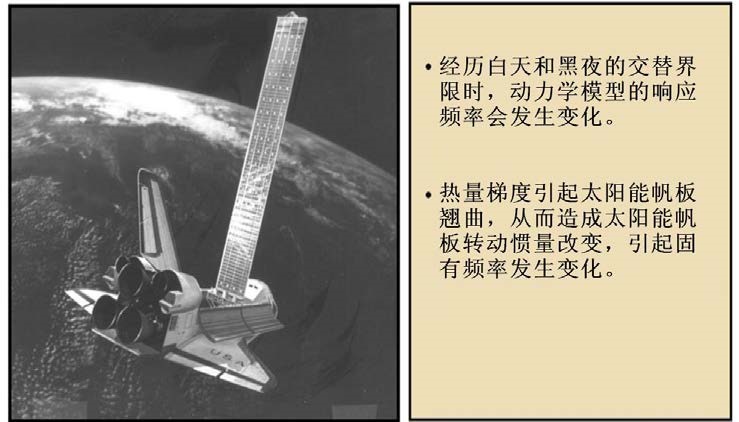
图 12-9 艺术家设想的在轨 SAFE 的太阳能帆板试验
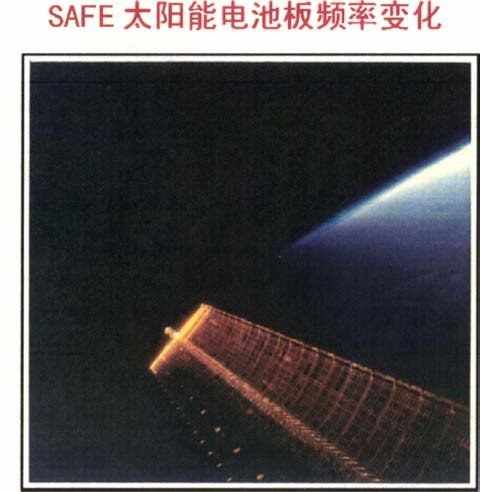
图 12-10 从航天飞机展开的 SAFE 太阳能帆板图片
12.1.5 航天飞机参数不确定性矩阵
在航天飞机设计的早期阶段,非常明确的是,航天飞机系统对参数不确定性的敏感性,需要采取一个协定措施,以定义所有影响飞行器诱导环境的参数不确定性。这一工作需要由上升飞行段综合工作组(AFSIG)来协调进行。完成初始版本花了大约 2 个月的时间。这个不确定性量级随着项目的推进以及从实验和飞行中不断采集到的数据而降低。给我们的启示非常清楚:每一个项目都必须研究和控制所有参数的不确定性,继而在整个项目生命周期内不断将其降低。研究不确定性水平数据的指导方针如下:
- 为了实现航天飞机的平衡设计,需要确定控制参数的平均值和 3σ 偏差;
- 这些偏差必须针对每一次任务和每个主要设计功能进行确定。
图 12-11 给出了部分参数变量列表,描述了任务的形式和量级。该汇编是一个大型
文件,放置在结构控制下。
ED5154

图 12-11 航天飞机参数变量矩阵的部分列表
12.1.6 固体火箭发动机(SRM)推力室和航天飞机主发动机(SSME)节流(SRM 药柱形状放样调节与SSME节流调节)
航天系统设计中的约束是必须的。然而,它们通常以牺牲系统灵活性、性能和进度为代价。航天飞机在最大动压 (q)下的约束就是一个很好的例子。约束对于消除轨道器尾部的振动是必须的,并且可以保证诱导环境(例如负载)在飞行器设计条件允许范围内。航天飞机性能对于动压限制(650psf范围内)和 3.15g的纵向加速度条件的限制是很敏感的。下表展示了敏感性和一般特性。(降低航天飞机动压主要有两种方式,一是对SSME进行节流调节;二是对SRM药柱放样形状进行调节。)一般来说,通过(SSME)节流降低 1psf的动压会损失 25 磅的有效载荷,而通过(SRM药柱)放样降低 1psf会损失 250 磅有效载荷质量。为了实现上述约束(动压限制和纵向加速度限制),航天飞机主发动机(SSME)需要节流至最小可能值,在推力较低的情况下,该最小值由喷管动载荷决定。这是喷管(工作范围从地面到真空)形状优化的需要,并且是喷管不稳定性和真空环境下最大性能之间的一个权衡。(在大气中飞行时,由于喷管边缘载荷的存在,SSME节流不能低于 65%满推力。)因此,SSME节流的同时,SRM药柱必须配合采用一定的形状放样,这样在最大q时, SRM的推力也能随之降低。据此,最终SSME 节流的适应性指导方案被提出,和预设的SSME节流曲线相比,它能够使飞行器的性能获得提高[Ryan,1996]。综上,我们只需记住必须“限制损失”。动压约束(放样与节流)的措施如下:
- SSME通过节流调节确保纵向加速度维持在15g,动压(q)限制在650psf范围内。
- 在大气中飞行时,由于喷管边缘载荷的存在,SSME节流不能低于65%满推力。 (3)65%的限制意味着使用(SSME)节流的同时必须配合使用SRM药柱放样调节,以保证动压q维持在650psf以内。
- 通过SRM药柱放样降低1psf会损失大约250磅的有效载荷质量,而通过SSME 节流降低1psf的动压会损失25磅的有效载荷。
- 可以用动压限制换取结构质量(二者之间需要权衡)。
12.1.7 固体火箭发动机摆动(万向支架连接)喷管
在航天飞机设计的初期,期望将三台主发动机通过万向支架连接在轨道器上,为上
升飞行段提供足够的可控性。因此在初始设计中将喷管固定在固体火箭发动机(SRM’s)上。随着获取的固体火箭发动机特性和其它参数偏差的信息越来越多,可以明显地发现,由于在固体火箭发动机推力方向和其它扰动量存在不确定性,飞行器不能仅由主发动机单独进行控制,固体火箭发动机需要增加推力矢量控制能力,如图 12-12 所示[Ryan,1996]。
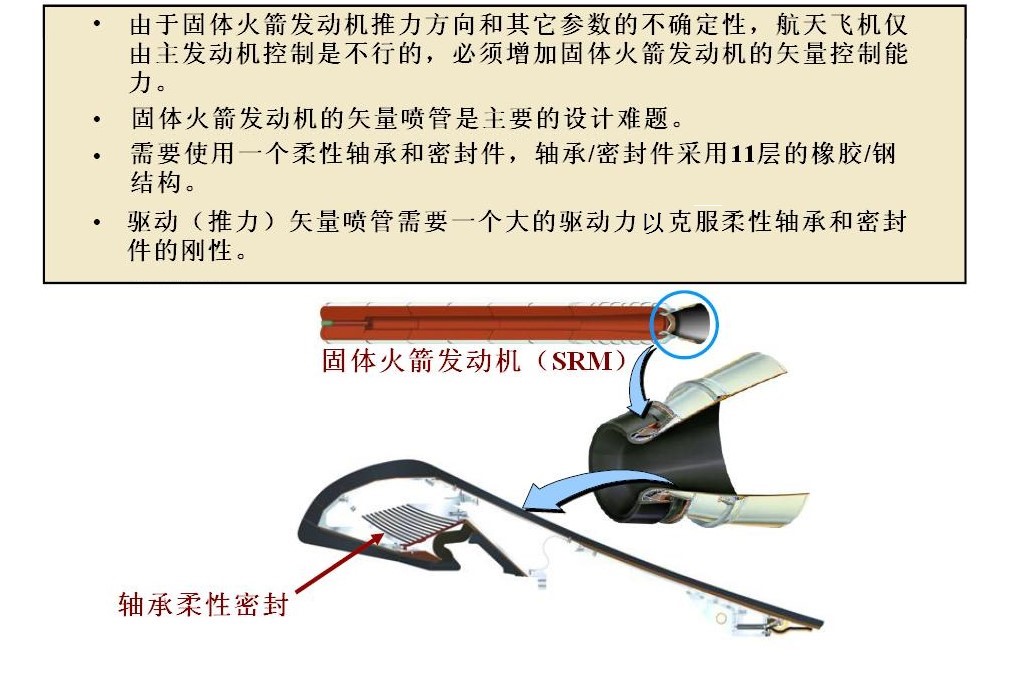
图 12-12 固体火箭发动机摆动喷管示意图
这对固体火箭发动机设计和整个航天飞机系统来说有着重要的影响。要使固体火箭发动机的喷管具备定向摆动能力,势必大幅增加其复杂性。解决方法是采用一个柔性轴承和 11 层的橡胶/钢密封件。通过摆动喷管来改变推力方向,需要应用大的驱动力克服柔性轴承和密封件的刚性,还要考虑其它载荷的影响,如空气动力。伺服机构的偏向、速率和加速度都必须适当,以满足控制性和稳定性要求。反过来说,大的驱动力需要喷管尾裙部内有高的液压能量供应,这带来了处理危险燃料的复杂性。所以,一个系统中固有的不确定性,对使用和成本产生主要的影响。
这里我们再次讨论了不确定性和敏感性,二者必须被理解、量化和改善,否则设计将是无效的。二者不只需要理解和管控,而且由其产生的需求经常是需要准确确定的设计依据。
12.2 启示12的重要经验:
量化敏感性、不确定性和裕度能够平衡风险 忽略系统的敏感性和不确定性会导致失败 量化 理解 管控
下一启示中,我们将应用对敏感性和不确定性的理解,将其作为设计中系统裕度要求的标准。
启示 13:项目裕度必须足够大
裕度必须足够大以覆盖设计中的预期增长、技术成熟度等级不高和敏感性。否则,将发生许多设计问题、预算超支和性能降低。
我们已经讨论过对敏感性和不确定性理解的重要性。为了覆盖系统中总是存在的不确定性和未知因素,理解是明智地增加裕度的主要的驱动因素之一。下面的教训说明了裕度必须充分,一是航天飞机缺少补偿性能损失的裕度设计,二是航天飞机主发动机泵轴承腐蚀的问题。
13.1 裕度实例:
- 航天飞机性能裕度
- SSME 液氧泵轴承座圈失效
13.1.1 航天飞机性能裕度
航天飞机设计过程中,在第一次飞行测试时,由于裕度不足以及缺乏对所面临问题的解决手段,导致了空军任务中接近 45,000 磅的有效载荷性能损失。许多问题在设计循环中发现,从而提出了许多减重策略以及更改固体火箭发动机、外贮箱、主发动机和轨道器等航天飞机组件的计划,这些解决方案同时也带来了许多使用流程和使用限制的变化。一个例子就是为保证结构载荷设计的安全,要求使用飞行前 4 小时的风测量数据来更新有效载荷以及飞行参数。以下列出了用于恢复有效载荷损失和解决其它一些问题的修正方法。
提高推进系统性能
- SSME 的 104%推力设计点和后来升级到 ATD 泵
- 大喉道和双管道集合腔减重计划
- 轻质量贮箱和随后升级到超轻贮箱
- 轨道器减重
- 高性能固体火箭发动机
- 降低风场设计标准
- 飞行引导偏差使用问题
- 额外增加维护、整修和检查条目
- 额外增加发射时的分析/限制条件
- 额外增加发射时的工作量
详细情况将在启示 15 中说明。
这些方法中,许多造成了其它问题。例如,SSME 推力增加造成发动机动力学环境条件更严酷,进而导致必须通过发动机部件升级来解决的破裂和疲劳问题。早期的部分解决方案也是放弃发射的覆盖性来减小重量。这个项目最终不仅完成了升级,同时对改
变设计标准、环境变量和设计参数的保守性产生了较大的影响。
13.1.2 SSME液氧泵轴承座圈失效
在 STS-27 任务之后,在例行的飞行后检测中发现,SSME 液氧泵的涡轮端面轴承的内座圈已经彻底破裂。金属断面显微检测表明,裂纹在发动机启动前就发生了,说明发动机在液氧中使用破损轴承座圈完成了整个工作。这一严重问题直到飞行后对硬件进行测试才发现。图 13-1 为涡轮泵剖面图,其中涡轮端面轴承位置用圆形标注。
图 13-1 航天飞机主发动机液氧泵轴承部分截面图
破损的原因归结为高应力条件下的应力腐蚀。在组装中,用液氮冷却轴以达到轴承到轴的过盈安装,遇水(装配过程中的凝结水)膨胀后,残余环向应力导致了轴承座圈破裂。同样,氟里昂清洗液也会带来潜在的污染。
过盈安装导致的周向应力是 30ksi 或更大,远远超过了内座圈材料的承受能力。为达到足够的裕度,对设计进行了调整,周向应力限定至 24ksi,并且强调了组件无尘腔内的污染和冷凝水问题,从而解决了应力腐蚀破坏问题。此外,在后来的高级涡轮泵应用中,更换了更坚固的内座圈材料以获得更大裕度。
13.2 启示13的重要经验:
分配足够的技术和进度裕度,否则以后就会为之付出代价。
准则 VI:项目的成功取决于对生命周期诸多因素的考量
该准则揭示了生命周期问题的重要性,包括对可用设计选择的影响、方案选择的重要性、认识到需求的深远影响、有时意料之外的结果以及按照全生命周期的最佳设计方案。
将讨论如下四个启示:
14.设计空间受制于产品在生命周期内的定位
15.方案选择和设计流程
16.需求推动设计
17.针对属性和成本的设计
启示 14:设计空间受制于产品在生命周期内的定位
三个生命周期阶段
方案/初始设计阶段
- 为各种选择和平衡提供开放的设计空间 细节设计
- 设计空间受方案选择所限制 验证和使用阶段
- 设计空间受现有系统限制
- 必须让系统工作起来,解决方案是受限制的 当我们从系统生命周期的角度考虑时,影响设计的可用选择范围和使用变得更为受限。生命周期可被划分为三个时间阶段:(1)方案或初步设计,(2)详细设计,(3)验证和使用。在方案或初步设计阶段,设计空间是自由的,可以自由选择必须的设计变量以满足任务要求。到细节设计阶段时,已经完成方案制定和初步设计决策,这严重限制了设计师选择变量的自由度。系统性能和成本的大部分由已经选定方案设计决定,这在启示 15 中将进行讨论。一旦系统已经投入生产,在验证和使用阶段,设计空间被现有系统所限制。除非有较大重新设计环节,否则系统必须在只进行小的调整或在使用限制下工作。在这个阶段的解决方案是非常受限的,显然,早期的选择对后期的选择有重要的限制作用。
14.1 设计空间的实例:
- 国际空间站支架设计
- 采用备用设计涡轮泵代替 SSME 基本型设计涡轮泵
14.1.1 国际空间站支架设计
在设计国际空间站科学支架(图 14-1)中,有四个主要的问题。(1)支架要求轻量化。(2)要求适用于安装和操作不同实验。(3)由于一些实验需要低重力环境,人员的活动和其它扰动的产生需要在支架上安装一个隔振系统。(4)支架必须具有足够的刚度,满足作为航天飞机载荷所需的最小频率要求,以避免发射时出现的动力学和载荷问题。
[Bookout,1996]

图 14-1 国际空间站科学支架的设计
由于设计要求和各种条件限制,方案设计开始考虑使用复合材料,满足重量和刚度要求。然而,当所有限制条件、需求和空间要求满足后,与铝材料相比,复合材料并没有节省多少重量,还不如一开始就采用更简单和便宜的金属材料进行支架设计。
同样,在上面所述的其它约束和需求之外,由于几何约束的限制,主动隔振系统的设计很困难。可以明显看到,这些限制带来了不想要的设计妥协。
ISS 支架另一个设计方面的考虑是支架还可用于其它不同功能,图 14-2 展示了其中的一些。要求单个设计灵活地具有可以完成这些功能的需求,给设计和验证带来了困难。
但总得来说,通用性的优势比设计问题更重要。

图 14-2 国际空间站支架功能和构型图
航天飞机轨道器设计是这个问题的另一个例子。NASA 和美国国防部都对航天飞机提出了一套设计要求。国防部军事上要求比 NASA 有更大的载荷和更大的再入横向机动范围。国防部要求横向机动范围为 1500 海里,从而在完成一次运送任务后能返回同一发射基地。NASA 出于任务中止条件考虑,需要的横向机动范围小。这样就出现了两种竞争的轨道器构型:一种是三角翼设计构型,这种构型能在超声速飞行时产生足够的升 /阻比来满足国防部的横向机动需求,另一种是简单的平直翼设计构型,这种构型满足
NASA 要求。由于飞行器需要满足两种需求,最终选择了三角翼设计构型。
显然,没有办法确定成熟的直翼设计会产生怎样的性能,尽管在初步设计方案阶段时,预测直机翼设计构型会有一个相对简单的热防护系统而且对着陆系统要求较低。在随后的发展阶段,国防部从来没有使用过轨道器的横向机动能力,但是航天飞机却一直产生着由于三角翼构型及其热防护系统带来的使用费用。
灵活性和通用性是设计要求的目标,但是这些目标通常限制设计空间,带来了设计问题和挑战。在项目的早期,要搞清楚通用性是否真的需要,并且清楚其带来的后果。
14.1.2 采用备用设计涡轮泵代替SSME基本型设计涡轮泵
为更换原来洛克达因的涡轮泵,普惠设计的新泵(图 14-3)汲取了原有泵的经验,提高了可靠性和可维护性。替代泵的重量限额超过了原型泵,增加的重量限额给涡轮泵设计的重大改进和可靠性提高提供了保障,然而,替代泵设计需与现有发动机系统协调接口,包括压头和管路、几何尺寸、压力和热接口都需要匹配并满足重量需求。由于这些限制条件,替代泵无法全部利用获得的教训而得到一个最优的设计。
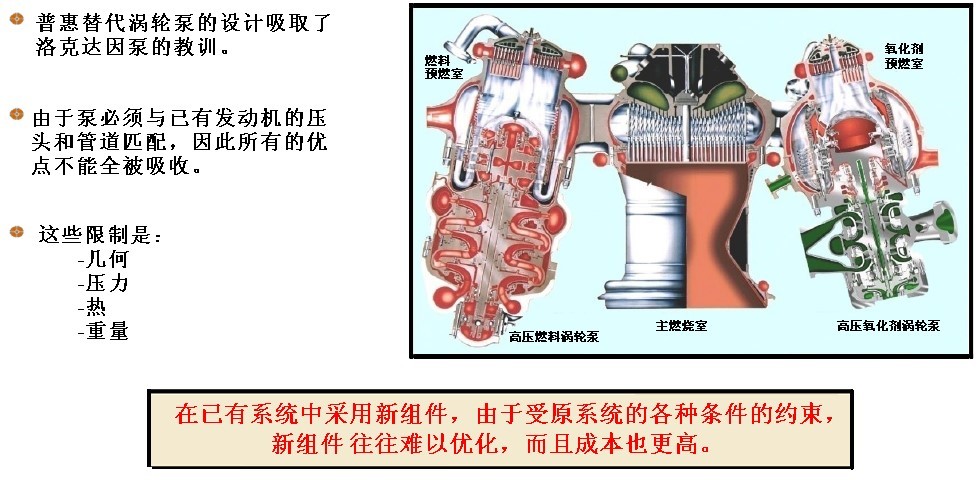
图 14-3 备用高压涡轮泵
一般,在现有系统中使用新组件时,由于接口限制因素导致新组件通常并非最优设计且成本更高。因此,这一启示就是认识到产品生命周期对设计空间的影响。正如在设计流程中我们所做的,让精度增加,不确定性降低,但是设计的选择性也减少了。减小约束以增加设计的选择。
14.2 从启示14得到的关键信息:
认识到生命周期对设计空间的影响 – 精度增加 – 不确定性降低 但是:设计选择减少
尽量减少设计限制以增加设计的选择机会。
启示 15:方案选择和设计流程
80%的项目问题锁定在方案选择上
启示 l4 指出了设计选择的自由度是如何随着设计的成熟而减少的。本启示说明这种约束影响是巨大的;早期设计过程中的选择决定了系统绝大部分的最终属性,包括系统如何使用、遇到的问题及其成本。
正确的方案选择很关键,再好的细节设计都不可能弥补一个存在缺陷的方案设计。 投入大量的精力在前期工程上(质量标准)
确保对选项进行充足的评估,最终根据各种方案和要求的细化(更多细节)进行收敛
- 选择一个在由众多方案或选项适当收敛后得出的方案,而不只是“找到” 答案
在选择方案前获取足够的精度
- 不仅仅依赖于分级排序的方法
- 在早期阶段,学科专家必须评估分级排序结果的有效性 采用足够成熟的技术
- 避免采用过多低技术成熟度的方案 不要冒险投机
选择,选择,还是选择
选择正确的方案至关重要。再好的细节设计都不能弥补一个存在缺陷的方案设计,
(反过来说,一个好的方案也会毁于糟糕的细节设计),这意味着我们必须在工程前期就投入大量的精力。需要在方案提出和选择中必须做的三个方面是:(1)充分剖析各种选项,(2)在确定方案之前,深入分析每个选项时应保证足够的准确度,(3)采用足够成熟的技术。
充分评估各种选项。为满足系统需求,设计时首先构想出大量的竞争性的结构、方案、以及备份设计,进而筛选掉不合适或不满意的选项以达到最佳的结构、方案和设计,其他选项则随着这个过程渐渐弱化。淘汰的内容列入之前的选项内,而对留下的选项继续筛选提炼。保证对各种选项都进行充分的剖析,这点很重要。我们必须避免由于自然倾向而一开始就选择那个看起来合理的方案,不应只是“找到”一种方案,而是对所有选择都采用严格一致的逻辑,保证每种方案都得到一个公正的评估,只有对所有可能的方案进行恰当收敛后才去选择最终方案。
这个原理同样应用在其他活动中。失效调查尤其趋向于“找到”陷阱。应当找出所有可能的选项并进行剖析,坚持判断的准则,只有在分析清楚后才能将其排除。
在确定方案之前,深入分析每个选项时应保证足够的准确度。方案的准确度应当随着设计流程的进展而不断地提高。在做出选择前,为确保比较的有效性,使参与竞争的概念具备足够的精准度是非常重要的,否则就会有错误的选择。实践已经告诉我们在所有的方案选择阶段,不应当仅仅依赖于分级程序本身的精准度,而应该引入学科专家来评估分级程序结果精准度的有效性。一个整体的工程评估,例如“飞船整体性能分析方法”,在这一问题上是有借鉴价值的。
应用足够成熟的技术。需要避免采用许多低技术成熟度的方案。对此有很多规则,通常认为在设计中,技术成熟度 TRL 低于 6 级的技术不能多于两项。任何不成熟的技术都应当有一个发展计划,采用偏离主流技术的替代方法是无法取得成功的。
这些建议是以全面的、符合逻辑的方式直接收敛到正确方案的。不要冒险,而是需要深思熟虑地做出正确选择。
本启示虽然特别针对方案选择,其准则也可应用到对选项进行评估的设计周期的其他阶段,例如:权衡研究、问题解决方案和部件更改评估。
15.1 方案选择和设计流程的实例
- 质量杠杆
- 土星 V 方案的选择历史
- 航天飞机方案的选择历史
引用的例子包括质量杠杆和土星、航天飞机的方案选择的比较。航天飞机的方案选择对性能演变的影响也进行了阐述。
15.1.1 质量杠杆
质量杠杆(图 15-1)是一个典型的早期决策在项目上的影响力和重要性的体现。在方案选择和早期设计中的投入对产品的质量是最有影响力的。随着设计周期后移,杠杆影响力下降,在产品制造出来后,各种选择就局限在使其进行工作所需要的使用流程中。尽管这一原则已被熟知,还是可以从中了解到,大部分组织的奖励机制,对于在后续生命周期中解决问题的奖励会多于在前期工作中对问题进行规避的奖励。
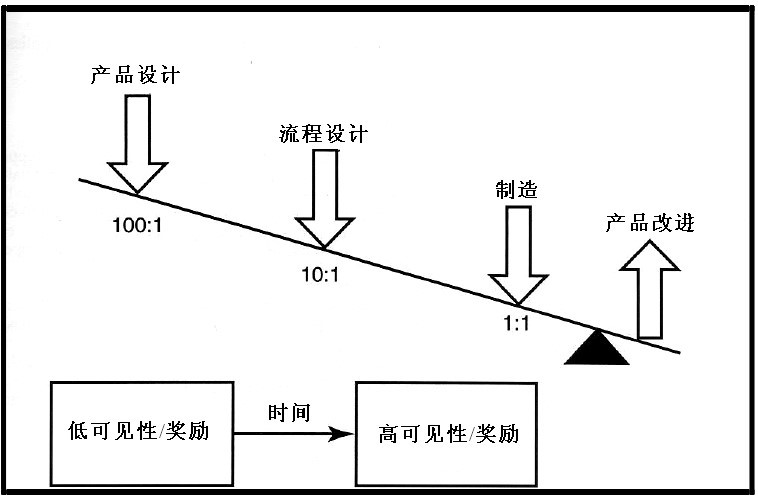
图 15-1 质量杠杆
15.1.2 土星V方案选择历史
土星 V 的方案选择和设计是一个进化的过程,建立在之前系统的经验上,包括:红石,木星,土星 I,土星 IB 和无人土星 V 的历次飞行(图 15-2)。这个过程在《土星各火箭级(Stages to Saturn)》中有详细叙述 [NASA SP-4206,1980]。

图 15-2 第一颗美国卫星、第一次载人航天飞行和土星/阿波罗的结构模块
建造一个像土星 V 这样规模的系统,虽然进入了未知的领域,但其大部分技术和系统与之前系统相比只是在数量上的增加,而不是质量上的进步。除了这种搭积木的建造方法,飞船本身是朝着简易性和最小接口的目标构思和设计的,这样就可以减少后期的各种不确定性和问题。而且,在载人之前,有三次不载人的土星 V 测试飞行。这一精细的过程促成了阿波罗的成功发射,图 15-3 和图 l5-4 展示了这一任务成功中的辉煌成就。
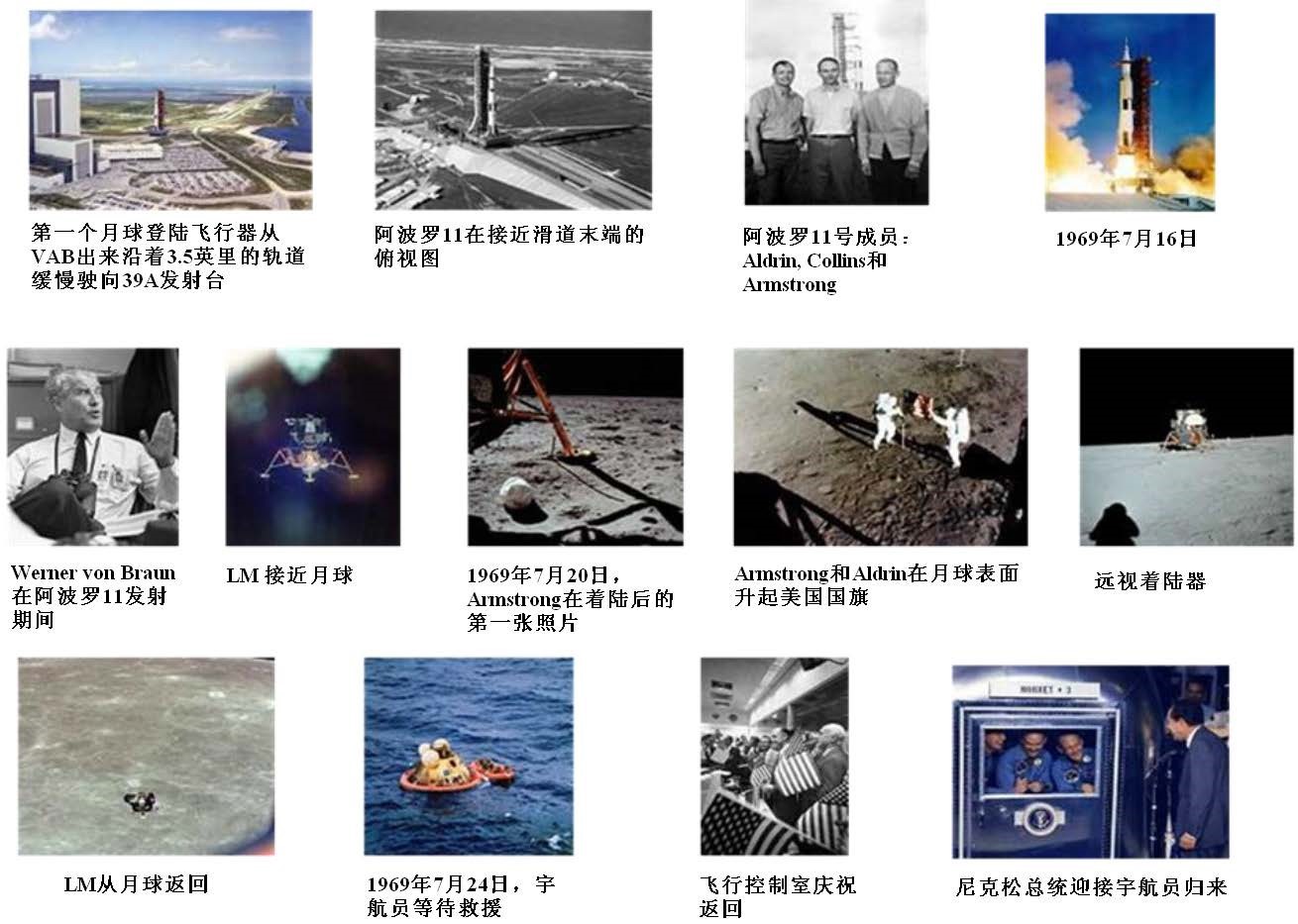
图 15-3 土星阿波罗飞船登月过程

图 15-4 阿波罗 11 号的月球基地
15.1.3 航天飞机方案的选择历史
航天飞机方案的发展选择了一条与土星 V 截然不同的道路。Dennis Jenkin 的著作 [Jenkins,1997]从技术和政治两个方面对该过程进行了精彩的描述。初始想法是建成一个完全可重复使用的系统,在那个年代被认为是最低使用成本的航天运输模式。研究的大量精力都集中在两级的构想,实现助推器和轨道飞行器均可回收。这种方法的问题是研发费用估计需要 l30.5 亿美元,而当时的财政预算和政治形势无法满足这种规模的资金,只有有限的 55 亿美元研发费用。这种约束使方案选择余地极少。评估了在此资金限制内能研发的技术后,NASA 选择了现在航天飞机的构型:固体助推,一级半构型,部分重复使用(图 15-5)。

图 15-5 航天飞机方案的演变
这种结构几乎没有应用的先例,并且接口复杂。同时,一级半构型追求的高效率导致了系统的高度敏感性。在热防护、推进系统和其他领域都需要有新的技术。因此,研发过程遇到了许多困难,而航天飞机的使用也复杂且昂贵。这一方案的选择决定了随后系统的复杂性和成本。
航天飞机有效载荷性能的演变说明了这种构型的敏感性。启示 13 中给出了由于多种设计问题导致的事故,也讨论了组件升级的解决方法。下面给出了这些性能损失的原因和一些应用的解决方案[作者的工作笔记]。
航天飞机的性能演变代表性变化
演变项目 影响
1.轨道飞行器设计与真实需求不匹配导致不能满足重量指标。 -27,000 lbs
2.加入季风影响导致的环境(负荷)增加。导致如下一些影响: -5,000 1bs
- 月平均风偏差用于设计
- 三轴和升降辅助翼载荷释放
- 分析和测试工作量增加
- 气动热/热防护系统影响(固体助推器和外贮箱)
- 轨道偏离的性能损失
3.将 SRM 固定式喷管重新设计成柔性万向喷管用于提供足够的控制
4.起飞载荷增加:
-交错 SSME 启动和异常关机
-地面风限制
-重量增加/重新设计航天飞机组件 -1,200 lbs
(不计入单独有效载荷影响)
-直到轻质贮箱前预拉伸的 SRB/ET 支杆
5.空气动力预测错误/STS-1 理论模型绘制 -5,000 lbs
-q 、SRB 分离、攻角修正对弹道的限制,
-性能损失
-热防护系统对外贮箱和固体助推器的影响 80%
-冬季的发射可靠性下降
-轨道飞行器机翼(前缘)
-发射日 I 载荷更新
-源自飞行的散差
6.比冲达不到设计要求
-SSME -2.5 s -SRM -1 s
7.STS-1SRB 点火超压
-改进的水喷注系统(水喷入推力室)
-水槽在主孔之上
-有效载荷负荷增加(限制性的重新设计,重新验证)
8.轨道飞行器外壳松动和毁坏
-运行
9.其他
-起落架和制动装置
-发动机升级
-SSME 疲劳和断裂问题
-ET 疲劳控制
-液氧喷嘴堵塞造成的比冲损失 -1 s
-SRB 回收
- 水击损坏
- 声学(再入时)
- 热(再入时)
总有效载荷损失 -45,000 lb 下图(15-6)示出航天飞机初始性能和目前性能近似值的对比,该性能图是为上文提到的空军任务绘制的。旁边列出的最后两列是性能加强措施,被用于弥补部分最初的损失。
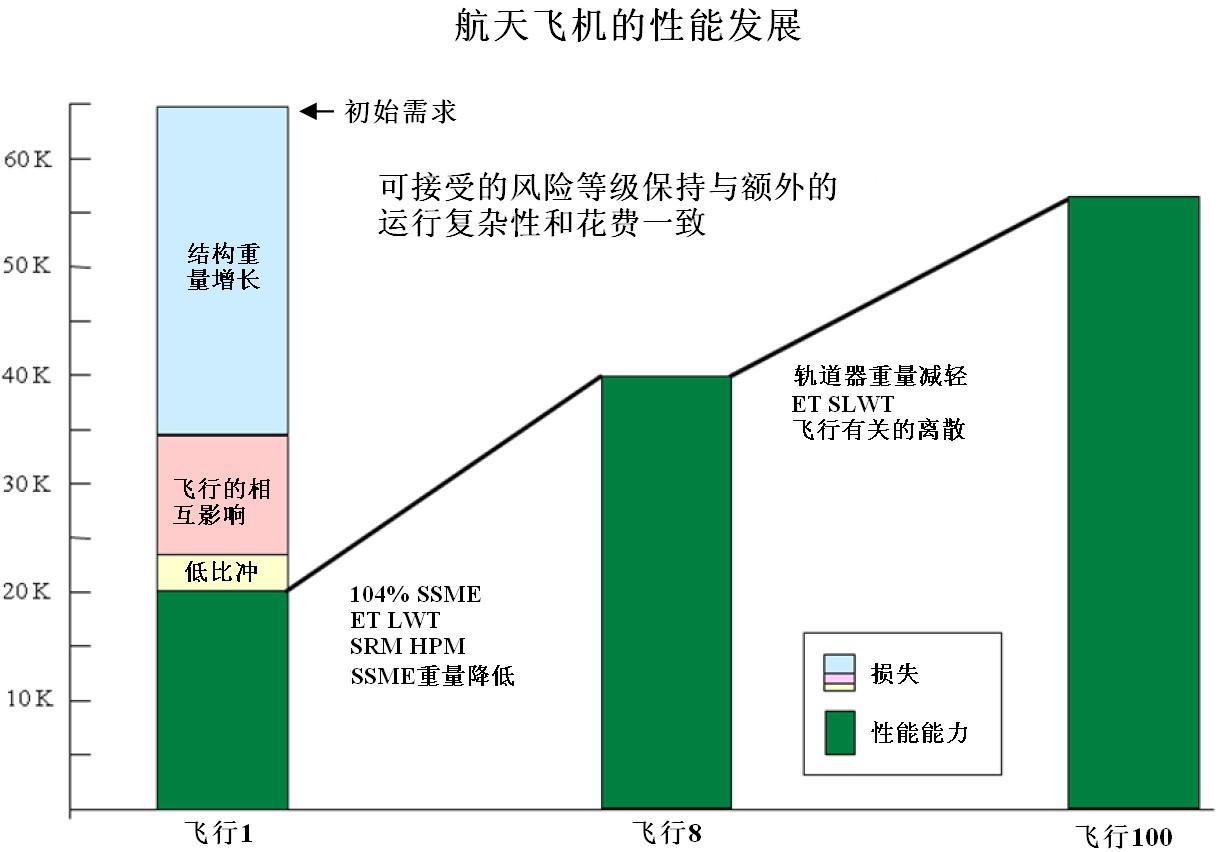
图 15-6 航天飞机的性能演变
总之,航天飞机的方案由外部需求和限制所驱动,并导致了复杂的技术问题,高昂的成本和带有持续高工程投入的使用复杂性。带来的启示很清楚:为满足性能和计划要求,我们必须不时回顾需求,努力获取最大化的系统健壮性,同时满足性能和计划需要。
决定的方案是错误的吗?在一个小组里谈到这个问题时,John Yardley 虽然承认了航天飞机使用具有各种挑战和高额成本,但是当时国会授权非常明确地限制研发经费。
“如果我们当时没有做出选择,就不会有航天飞机计划了”。基于政治现实,这个决定是正确的。
土星 V 和航天飞机的例子说明了在系统的整个生命周期上,方案选择的重要性。我们需要让它在设计初期就保持正确。在研究所有的可选方案后,选择在整个生命周期内的最好方案。那么这个选择就意味着和政治政策无关吗?不——从来都不是而且将来也不会。这些考虑很少与技术选择相符合。驳回不切实际或目光短浅的需求是每个工程人员的职责。在这些问题被清晰地描绘后,工程的任务就是在保留的限制下获得最佳系统。
要获得最佳系统,必须把大量的精力投入到项目前期的工作中,并且要足够精确地深入剖析每个有竞争力的方案,揭示主要问题和设计属性,这样才能选择正确的方案,为随后项目的成功提供决定性的支持。
15.2 从启示15得到的关键信息:
挑战需求和限制 要足够精确地深入剖析每个有竞争力的方案选择正确的方案
启示 16:需求驱动设计
需求驱动设计。性能要求越高,响应的敏感性就越高。施加的约束条件极大地改变设计。
外部/政治考虑和约束条件强烈地驱动设计
技术限制同样驱动设计,所以审慎和小心地应用 在所有层次上分析和挑战需求、限制和标准以获得最大可能的工程设计灵活性 不能接受不切实际的进度安排和预算
不清晰和不确定的顶层需求将会导致计划极大地浪费设计精力和设计折衷 过于具体的准则将限制设计工程师的创造性 标准必须根据特定项目来调整
“对任何给定的一组技术成熟度和基本性能的需求,都有一个固有的形状/规模,如果过度强调一处,则势必另一方面有其缺失,造成技术问题、成本增加和进度延误”
- Garry Lyles
需求决定设计,引自 Pugh 的书《总体设计(Total Design)》。学习到的原则是:“性能需求越高,设计敏感度对影响设计的所有参数和设计响应也就越大”。外部或政治的考虑和各种限制驱动着设计,而且往往以有害或者不可预测的方式,因此应最大限度予以排除。这包括驳回不可接受的成本和进度。极大影响需求的另一方面是技术人员在采用设计准则时倾向于非常保守。这些准则应当根据每一个项目来制定,并且使可接受的风险处于最低要求。
16.1 实例:
- 敏感性与性能
- Pye 和其他人的摘录
- SSME 经历的主要故障
- 疲劳和破裂问题
- 液氧部件失效
- 4000Hz 液氧分流叶片问题
- 其它的 SSME 问题
- 超轻的外贮箱 1.1 敏感性与性能
多年以前,在处理 SSME 大量问题和故障时学到一个准则是:性能需求越高,系统对任何参数不确定性的敏感性就越高。图 3-3 是该准则的一般性图示,图 l6-1 对此再次说明。有两条曲线,其中一条代表现有技术,另一条代表先进技术。曲线形状不随改进的技术而变化,而是改变到右下方,这说明降低敏感性的一种方法是提高系统的技术水平,其同样说明更高的性能,需要投入更多的精力、更深入的分析和测试,以在该点进行设计和使用。
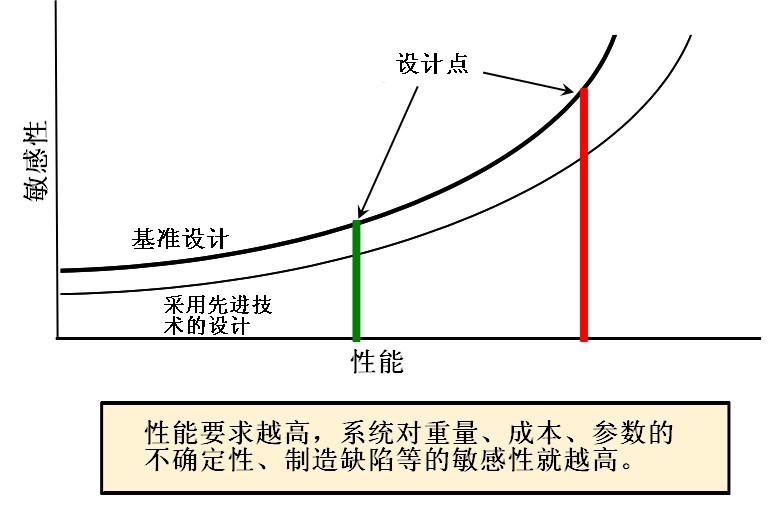
图 16-1 敏感性与性能的关系图
我们收集了 Pye 和其他人关于敏感性和性能需求准则方面的一些观点在下面列出,不加评论。
- “当你把精力投入在一个系统中时,你永远无法选择会发生什么样的变化和保留什么样的结果。你所能做的一切,只是在一定限制范围内体调节不同变化的数量,这就是设计。”-David Pye
- “若需求存在不可协调的冲突,则其设计必将在一定程度上存在缺陷…,设计者或客户不得不选择缺陷的程度,以及什么地方将存在缺陷。”-David Pye
- “正如人终将逝去一样,所有结构最终都将断裂和损坏。将这些现象推迟到适宜的时间出现,正是药物和工程技术的目的。问题是:何时将被认为是适宜的时间?”
-J.E.Gordon
- “大自然母亲不会看我们的报告,如果我们不遵循她的方式,必将失败。”-德国谚语
- “纸张是有耐心的,不论合理或是荒谬,它都接受我们所写的。”-德国谚语
- “以最大程度可能性去和大自然母亲合作,耗能最小的解决方案通常是最可靠的方式。”-John Junkins
- “为了理解工程是什么和工程师该做什么,需要理解失败是怎么样发生的,以及它们是如何比成功对推动技术发展的贡献更多。”-Henry Petroski
- “所有的设计本质上都是创造性工作,创造人的思想状态决定着一切;即就是
设计者思想状态决定一切,而这些正是设计所关心的”-无名氏
16.1.2 SSME经历的主要故障
SSME 模块 II 的性能、重量和几何要求在图 16-2 中示出。这些要求都是根据航天飞机飞行需要来的,而航天飞机的飞行需求受到空军关于有效载荷尺寸和重量、NASA 的可重复使用航天飞机的重要影响。这些需求类型已经造成了一个高能量密度的发动机(大约是 879HP#)。SSME 达到了 100%的成功飞行且证实其可靠性为 0.9995。有六个因素导致了目前的模块 II 的构型。高室压(3000 psi)、高室温(~6000 ℉)和高涡轮转速(燃料泵约 36,600 rpm)是诸多问题的根本原因,因为它们超出了设计经验范围。举个例子,大量的问题都与金属材料断裂和疲劳失效有关,从而导致了重复性工作循环。
|
最大推力:(109%功率水平) |
海平面:418000 磅真空:512300 磅 |
|
节流范围: |
67% ~ 109% |
|
压力: |
氢泵出口:6276 psia 氧泵出口:7268 psia 燃烧室压力:2994 psia |
|
比冲(真空): |
452.3 秒 |
|
高压泵功率: |
氢:71140 马力氧:23260 马力 |
|
面积比: |
69:1 |
|
重量: |
7774 磅 |
|
混合比:(O/F) |
6.03:1 |
|
尺寸: |
长:168 英寸,宽:96 英寸 |
|
推进剂 |
燃 料:液氢氧化剂:液氧 |
图 16-2 模块 2 航天飞机主发动机的需求(109%功率水平)
SSME 研发成本约 25 亿美元(1996 年),并进行了 163 次反复工作循环才研发出经过验证可用于载人的发动机,参见文献[Havskjold, G.,Partl,2 and 3,2009]。如图 12-l 所示,大约 73%的研发成本都与改进有关。
下图是一个典型的在试车台上热测试中的 SSME。
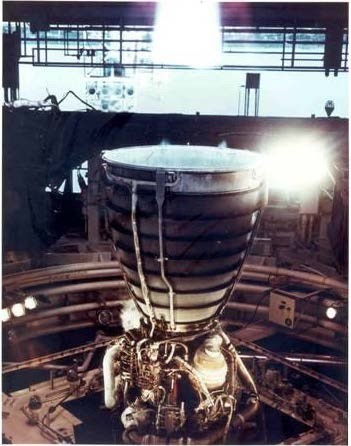
图 16-3 航天飞机主发动机点火试验
SSME 是一型分级燃烧发动机,有两台连接到轨道器的低压泵,两台连接到发动机的高压泵。液氧组泵和燃料组泵由管路连接,管路的一部分与波纹管连接,因此发动机可装备万向节来摆动。其余组件在图 16-4 中示出,例如,喷管,燃烧腔,预燃室和控制器等。在研制试验中,这些组件出现了许多问题与故障[Cikanek,1987]。目前飞行使用的发动机有六个模块进行了升级以解决这些不同的问题,其中一些已经在先前讨论过了。

图 16-4 SSME 组件
在全尺寸 SSME 发动机的研制阶段,其组件的全部改进记录在图 16-5 中列出,参见 [Havskjold,G.,Parts l,2 and 3, 2009]。正如所看到的 163 次反复的工作循环,但是其中一半的重复性工作的成本都很少。
发动机内部故 发动机
发动机 涡轮机械 燃烧装置 阀门 内连接 其它障模式数量 系统
|
SSME |
163 |
8 喷管 51 HPOTP 6 主喷注器 42 HPFTP 3 燃料预燃室 0 MCC |
17 |
37 次,包括热交换器、低压泵、传感器、控制器等 |
图 16-5 SSME 研发过程中的所有故障
而在图 16-6 示出的是发生在研发测试阶段的 38 个主要故障,总共耗费了 18 台 5 千万美元的发动机。图 16-6 给出多种不同硬件组件故障的定位,每一个故障的花费是 3 千万美元或是更多。由于 SSME 是一型技术先进的发动机,那时对环境、硬件特性、高
级计算工具和整体设计经验缺乏足够的理解。
|
失效编号 |
日期 |
试验编号 |
失效点 |
发动机 S/N |
洛克达因报告 |
|
1 |
1977 年 03 月 24 日 |
901110 |
HPOP 主液氧密封圈 |
0003 |
RSS-8595-11 |
|
2 |
1977 年 08 月 27 日 |
901133 |
燃料预燃室烧穿 |
0004 |
无 |
|
3 |
1977 年 09 月 08 日 |
901136 |
HPOP 轴承 |
0004 |
RSS-8595-13 |
|
4 |
1977 年 11 月 11 日 |
902095 |
HPFP 涡轮泵叶片 |
0002 |
无 |
|
5 |
1977 年 12 月 01 日 |
901147 |
HPFP 涡轮泵叶片 |
0103 |
无 |
|
6 |
1978 年 03 月 31 日 |
901173 |
主喷注器液氧喷嘴失效 |
0002 |
无 |
|
7 |
1978 年 06 月 05 日 |
901183 |
主喷注器液氧喷嘴失效 |
0005 |
无 |
|
8 |
1978 年 06 月 10 日 |
902112 |
发动机燃料供应管路堵塞 |
0101 |
RSS-8595-14 |
|
9 |
1978 年 07 月 18 日 |
902120 |
HPOP cap 探针 |
0101 |
RSS-8595-15 |
|
10 |
1978 年 10 月 03 日 |
902132 |
MOV 错误安装 |
0006 |
无 |
|
11 |
1978 年 12 月 06 日 |
901222 |
HX 失效 |
0007 |
RSS-8595-17 |
|
12 |
1978 年 12 月 27 日 |
901225 |
MOV 磨损 |
2001 |
RSS-8595-18 |
|
13 |
1979 年 05 月 14 日 |
750041 |
喷管 steerhorn 失效 |
0201 |
RSS-8595-19 |
|
14 |
1979 年 07 月 02 日 |
SF06-1 |
MFV 外壳 |
2002 |
RSS-8595-20 |
|
15 |
1979 年 11 月 04 日 |
SF06-3 |
喷管 steerhorn 失效 |
2002 |
RSS-8595-21 |
|
16 |
1980 年 07 月 12 日 |
SF10-1 |
FPB 烧穿 |
0006 |
无 |
|
17 |
1980 年 07 月 23 日 |
902198 |
主喷注器液氧喷嘴失效 |
2004 |
无 |
|
18 |
1980 年 07 月 30 日 |
902284 |
MCC 保护脱落 |
0010 |
RSS-8595-22 |
|
19 |
1981 年 01 月 28 日 |
901307 |
FPB 喷注器液氧喷嘴 |
0009 |
RSS-8595-24 |
|
20 |
1981 年 07 月 15 日 |
901331 |
主喷注器液氧喷嘴失效 |
2108 |
无 |
|
21 |
1981 年 09 月 02 日 |
750148 |
主喷注器液氧喷嘴失效 |
0110 |
无 |
|
22 |
1981 年 09 月 21 日 |
902249 |
HPFTP 叶片失效-FPB 使液氧喷嘴不起作用 |
0204 |
RSS-8595-23 |
|
23 |
1981 年 10 月 15 日 |
901340 |
燃料涡轮泵周转管 |
0107 |
无 |
|
24 |
1982 年 02 月 12 日 |
750160 |
FPB 燃料供应系统堵塞-冰 |
0110F |
RSS-8595-27 |
|
25 |
1982 年 04 月 07 日 |
901364 |
Kaiser 螺母 |
2013 |
RSS-8595-28 |
|
26 |
1982 年 05 月 15 日 |
750168 |
OPOV 泄漏 |
0107 |
RSS-8595-29 |
|
27 |
1982 年 08 月 27 日 |
750175 |
HPOP 轮盘输送管(U/S FM) |
2208 |
RSS-8595-30 |
|
28 |
1984 年 02 月 14 日 |
901436 |
冷却剂衬套失效 |
0108 |
RSS-8595-37 |
|
29 |
1985 年 02 月 04 日 |
901468 |
FPB Instr Boss 破裂 |
0207 |
无 |
|
30 |
1985 年 03 月 27 日 |
750259 |
MCC 出口颈流 |
2308 |
RSS-8595-39 |
|
31 |
1987 年 07 月 01 日 |
902428 |
OPB 喷注器铜焊 |
2106 |
无 |
|
32 |
1989 年 06 月 06 日 |
902471 |
LPF 挠性连接 |
2206 |
RSS-8595-43 |
|
33 |
1989 年 06 月 23 日 |
904044 |
HPOP 涡轮泵端部轴承 |
0212 |
RSS-8595-44 |
|
34 |
1991 年 11 月 06 日 |
901674 |
CCV 失效 |
2032 |
无 |
|
35 |
1992 年 06 月 18 日 |
902562 |
OPOV 泄漏 |
2107 |
无 |
|
36 |
1996 年 01 月 25 日 |
901853 |
HPFTP 叶片失效 |
0523 |
无 |
|
37 |
1997 年 08 月 27 日 |
901933 |
喷管管路破裂 |
0524 |
无 |
|
38 |
2000 年 06 月 06 日 |
902772 |
FPB 燃料歧管带污染 |
0523 |
无 |
图 16-6 SSME 的主要故障
SSME 与 F-1 和 J-2 发动机相比,可以看到所有这三种发动机都技术先进,技术不确定性因子都很高且很类似,结果,其研发成本和反复次数也是类似的。为了在将来减少研发成本,必须要降低技术不确定性因子。最后,需要指出的是 SSME 是唯一经过验证的用于人类飞行的可重复使用火箭发动机。
(1)SSME 事故和疲劳失效
在 SSME 的基础设计中,没有断裂力学设计的要求,并且材料性能也是采用预测的最小值。1973 年在完成基础设计和图纸后,制定了一项断裂力学计划。1980 年 5 月,在首飞前完成了结构性审查[Mulloy, 等,1980]。与结构实践相关的主要发现是:SSME 的结构设计数据库是成熟的,而且分析工作处于当前技术发展水平,材料性能是预估的最小值。与组件评估有关的主要发现是:11 个不符合验证标准的组件,其中 3 个的失效可能性比其它的要低 1 个量级。喷管失效是降低结构标准的主要因素,并且是过程控制和损害的结果,而不是结构设计不足。与结构可靠性有关的主要发现是:SSME 与 J-2 比较说明了 UCR 的损坏率是相同的,并且期待能随点火时间的增加而显著提高可靠性的两个发动机的失效趋势是相同的。1980 年 3 月 30 日,STS-1 任务中,一台发动机上的一个结构失效导致生命损失或任务失败的概率是 0.05。
在与 1973 年断裂力学计划相关的活动中,150 条焊缝被识别为“断裂关键”。这些焊缝根据 NDE 进行了改进而作为“不重新设计” 项目[Rocketdyne 报告,1989]。在第 51 次发射之前,抽样鉴定焊缝,在第 51 次发射之后,焊缝评估关键项目表(CIL)扩展到识别所有焊缝。这一思想是在飞行试验之前为保留所有焊缝信息提供依据,按要求进行识别或修复,并为快速筛选出将来的焊缝问题建立一个焊缝数据库。那时材料数据库包含了 1150 页的设计性能,其中的 43%是在一些不可证来源、外推和经验关系式中得到的“最小预测值”。材料数据库升级到包括 26 台 SSME 的 8500 次材料测试所获得的数据,其中 1400 次在高压氢气中进行。另外,断裂力学数据库内容扩展,包括了焊接缺陷测试。
在焊缝评估中[Rocketdyne 报告,1989],FMEA/CIL 焊缝统计包含了 3,165 条焊缝。最初,有大约 2000 条焊缝在屈服条件下工作,这种工况导致了在热试中失效。该系统对引起焊接补偿中的偏心和错位的制造误差敏感。正如下图 16-7 所示,在管接头处会有焊缝不匹配。为了结构生命评估,需要对每一条焊缝做蜡模以确定其准确几何特征。
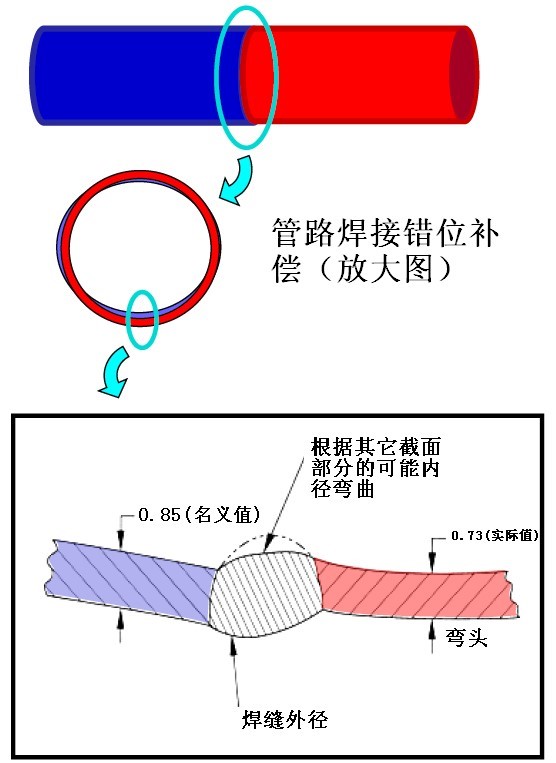
图 16-7 焊接错位不匹配示意图
SSME 模块 I 构型中的总焊缝数目为 23,055;10698 条是由普惠洛克达因制造的,
12,357 条来自供应商,其中 12,000 条是在金属 TPS 上的阻抗热点焊[Zimmerman,2010]。
SSME 阶段 II 构型(1988)和现在在飞的模块 II 的结构比较指出,从燃烧装置中和涡轮泵组件中去除了超过 1000 条焊缝。
尽管没有断裂力学的要求,并且已经在基础设计中采用材料性能的最小预估值,但是,从那以后,材料性能通过实验室和热试进行确定。通过焊接过程、验证、检查、分析评估、设计、热点火试验和材料测试等方面的改善,焊接接头的裕度和可靠性已经得到提高。
(2)SSME 疲劳与液氧喷嘴破裂事故
在 SSME 的研发中,有 5 台发动机由于主喷注器组件里液氧喷嘴的高周疲劳(HCF)而失效。在所有其它喷注器的调查中,又另外发现 2 个破裂的液氧喷嘴。下面图 16-8 展示了推力室头部、主喷注器和涡轮泵组件。
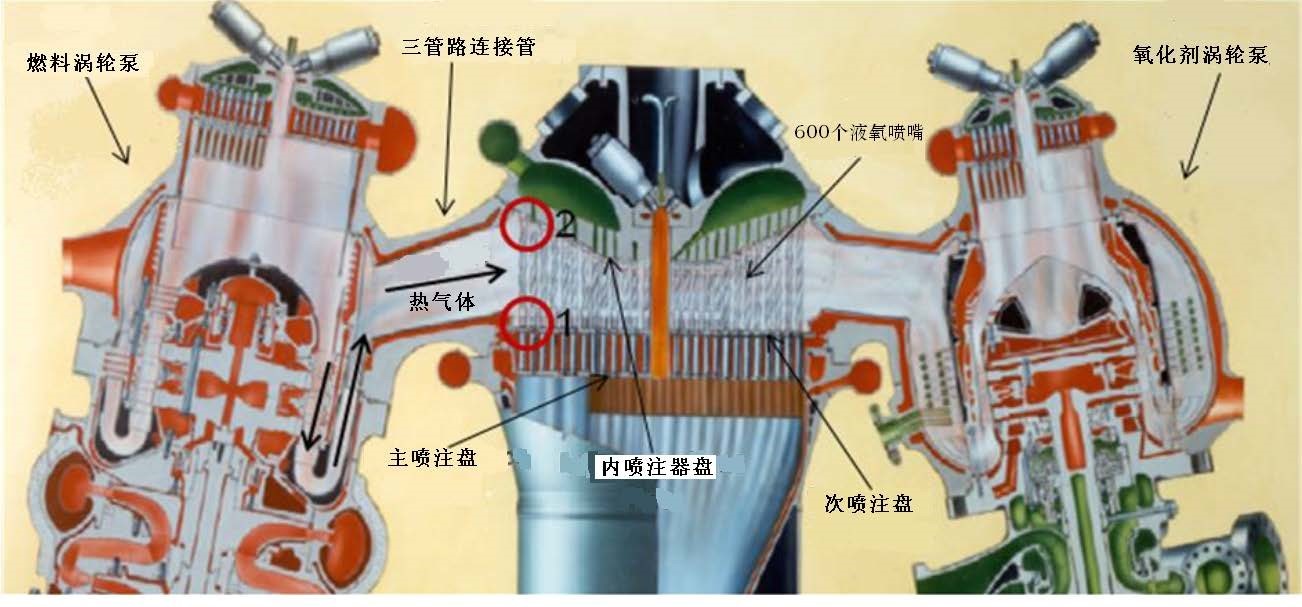
图 16-8 推力室头部、主喷注器和涡轮泵装组件图
喷注器内有 600 个液氧喷嘴将液氧输送到喷注器的主喷注面上。HCF 失效是由静应力(热和压力)和动应力,例如喷嘴涡流脱落引起的。约 70%的热燃气来自燃料侧,而 30%来自氧化剂侧[Pelaccio 等,1984]。从燃料涡轮出来的热气旋转,这是由于其通过一个 180 度的弯头,然后突然进入三个管路传送通道,见图 16-8。这些高能量、非均匀、分离和紊乱的流体冲击到液氧喷嘴上。这种失效 70%是由燃料侧的热燃气引起的,如图中圆圈 1 和 2 的位置。
图 16-9 是第一次事故失效的液氧喷嘴(Engine E0002)。左图中,可以看到由于载荷引起的变形,在右图中,通过观察主喷注面盘可以看到喷嘴的烧毁情况。
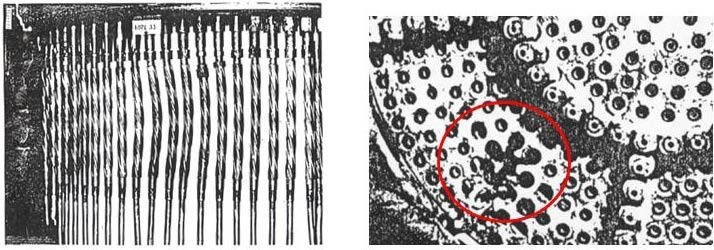
图 16-9 液氧喷嘴断裂(Engine E0002)
最初的开裂发生在液氧喷嘴尖的螺纹处,见图 16-10。一旦有贯穿的裂缝,高压液氧就会流入喷嘴的燃料区域,导致液氧喷嘴内起火。当喷嘴烧灼贯穿后,液氧就流到了喷射器二次面和主面之间的富燃区域,进而引起了液氧喷嘴内部各面之间的烧灼。失效区域在图 16-8 中由圈 1 指出。
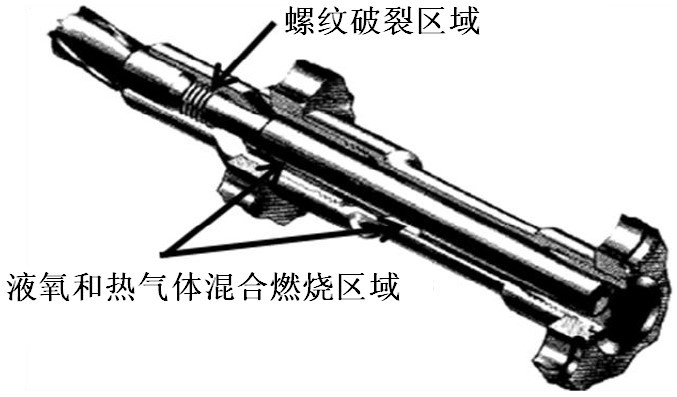
图 l6-10 液氧喷注器失效机理图
上面介绍的液氧喷嘴失效发生在:发动机 E0002,3/31/78;发动机 E0005,6/5/78;和发动机 E2004,7/23/80[Hopson,1980 年 8 月]。在发动机 E0005 失效后,加入了流动
防护罩,但是采用了一台不同的喷注器。在试验后,防护罩破裂了,但是没有灼烧贯穿问题。下个发动机是发动机 E2004。流动防护罩的目的是转移流动并且分担部分载荷。
然而,在没有防护的喷注器周围,液氧喷嘴依然开裂且烧坏,见图 16-11。
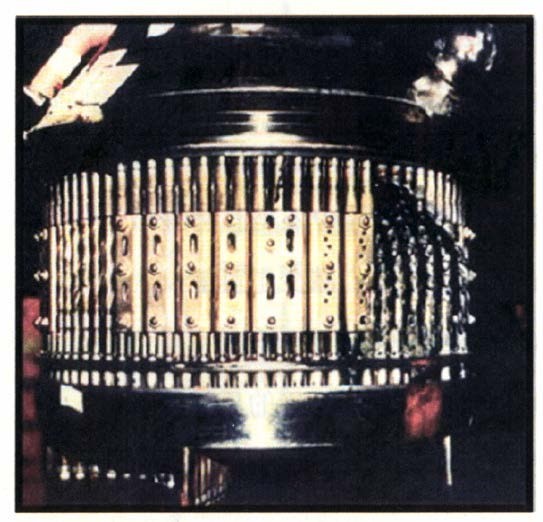
图 16-11 发动机 E2004 喷注器失效图
在在发动机 E0002、E0005 和 E2004 中的液氧喷嘴失效位置见图 16-12。

图 16-12 液氧喷注面板失效分布图
为了继续发动机研发试验,对喷注器进行了更多的修改。液氧喷嘴采用 316L 不锈钢制造,对发动机 E2108,喷嘴尖的材料换成了 Haynes188。另外,流动防护也被加到了喷注器外周的所有喷嘴内。在发动机 E2108(7/15/81)[Hopson,1981 年 7 月]和发动机 E0110(9/2/81)[Hopson,1981 年 9 月],试验中,液氧喷嘴由于 HCF 再次失效。然而,裂纹发生在与推进剂盘相邻的氩弧焊焊缝区域的喷嘴顶部,见图 16-8 中圈 2,液氧流过裂缝,到达推进剂盘和喷注器二次面之间的区域,而引起着火,分析认为 E2108 失效是由于从 RPL 到 FPL 的更为恶劣的(没有预想到的)流动环境,以及为达到 FPL 燃料涡轮泵的改进引起的。之后,液氧喷嘴针对更恶劣的环境重新设计。至于后续的 E0110 发动机的失效,即便进行了试前检查,一些未损坏喷嘴的试验后检查揭示了氩弧焊的制造缺陷。之后,为减轻未来的失效,对检查程序进行了改进。最终,所有的液氧喷嘴材料都换成了 Haynes 188。喷注器组件这一改变导致了发动机 Isp 下降了约 1.5s(有效负荷减少了 600 磅)。
为增加裕度和性能,同时改善安全性和可靠性,投入精力重新设计了热气体在燃料喷嘴内的流动通道。三路输送管被改为两路输送管,每一路增大 30%的截面面积,还增大了 68.5%的转弯出口面积,并且增加了 75.3%的结合部面积。这些增加的横截面积对降低动压很有效,也降低了静态和动态流体载荷。而且,管道的进口和出口区域改成为了圆型。输送管经扩张进入燃料预燃室和主喷注器室。另外,采用转向叶片令燃料涡轮到输送管的流动更为均匀,并且降低了燃料涡轮的出口压力梯度。这些改变的作用是为了让流动更加均匀[Pelaccio 等,1984]。在两路输送管的设计中,消除了 72 条焊缝,也少了 52 个零件,与三路系统相比,成本降低了 40%[Jue,1997]。
图 16-13 展示了 CFD 计算中三管和两管结构的混合压力云图[Ames Research Center,
2000]。可以看到两管系统流动更均匀,降低了载荷和流动损失。
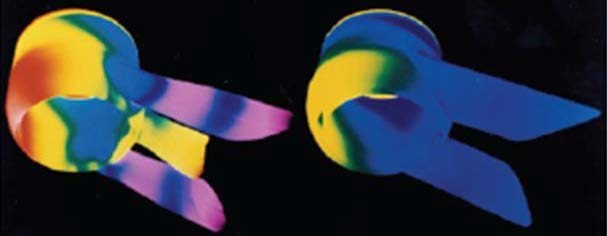
图 16-13 燃料侧的热气总管
图 16-14 是一个环向总压分布对比,可以看到,两管系统比三管系统要均匀得多。
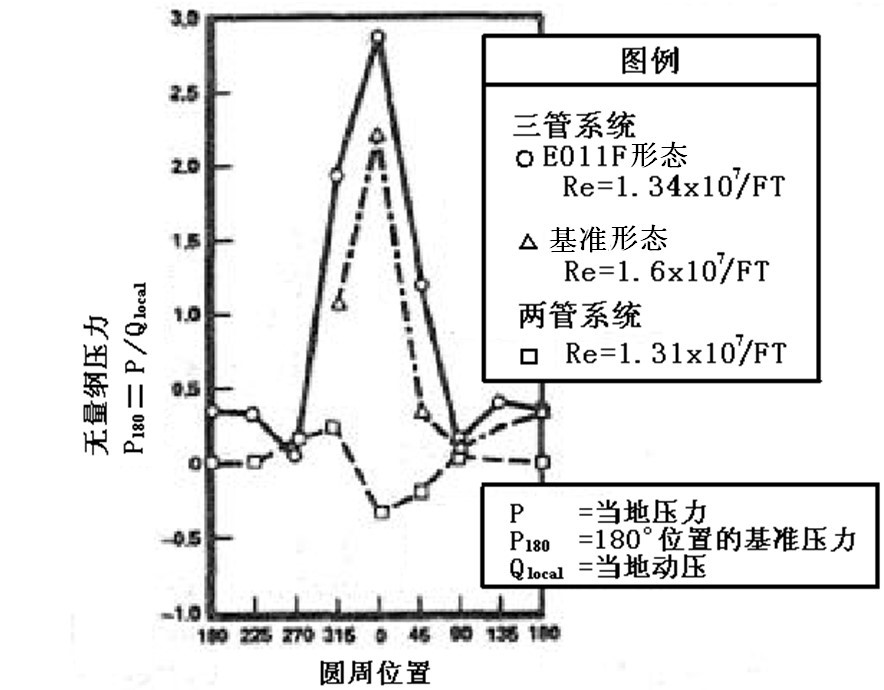
图 16-14 180 度转弯的圆周管道下游的总压偏差
在 SSME 研发初期,没有估计到热气总管中流动环境的严重性。过去,对于静态、动态环境,或者气体流道和喷注器流动均匀性的影响没有提出合适的要求,造成的后果是五台发动机的喷注器失效,此外有两个明显的失效形式。在热试及缩尺模型试验中进行了大量的测量工作,以理解流动环境和找出失效机理。最后,这种结构成为了基础型设计,并通过了飞行所需的验证。
这种结构被应用在模块 I 中,并于 1995 年 7 月在 STS-70 进行首飞。SSME 后来又在改进的发动机基础上做出了进一步的完善。
(3)4000Hz 的液氧分流叶片振动问题
在 SSME 的研制试验中,随时间逐步提高发动机的功率量级,用以评估硬件随功率量级提升的整体性能和工况表现。当功率增加到 109%,发动机 E2025 万向节轴承上的加速计采集到,在频率为 4000Hz 时有 RMS 接近 100g 的强振动量级[Jones 等,1994]。
振动的源头追溯到 SSME 头部的液氧进口三通位置,见图 16-15。
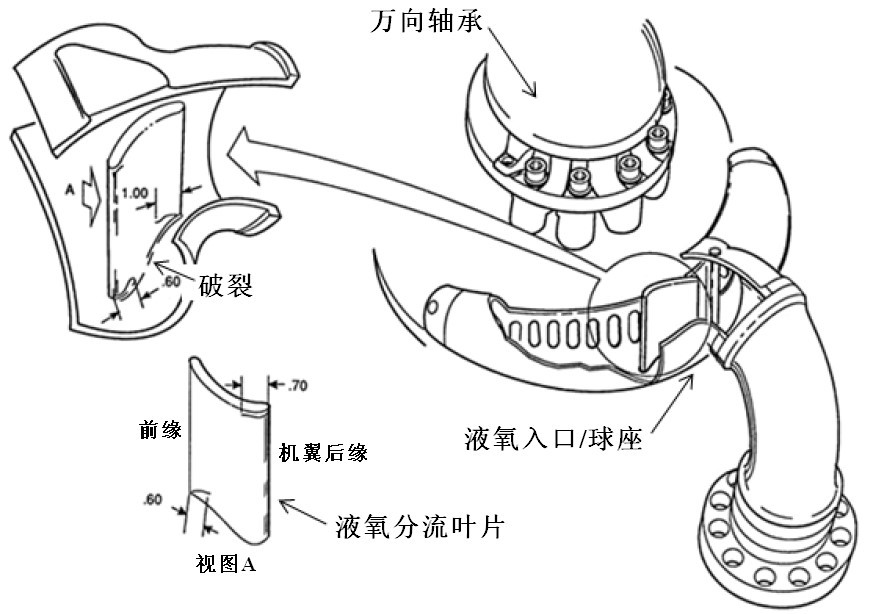
图 16-15 万向节轴承、液氧进口/三通和分流叶片图
经检测,E2025 发动机的硬件没有损坏的迹象。对 22 台发动机和 14 台发动机头部的数据评估表明,只有发动机推力在 100%以上量级时(不是全部)会发生 4000Hz 振动,硬件检测表明也是在制造公差之内的。但是,在 E2116 发动机中,三通外部壳体附近的一只叶片出现裂缝,而 E0005B 发动机的两只叶片破裂。
同时,结构和 CFD 模拟、水流和液氮测试、详细的热点火振动试验数据说明了从液氧进口球座分流叶片钝尾缘处的涡脱落频率是 4000Hz [O’Connor 等, 1988]。这一频率和一阶扭转模态频率发生了谐振,导致振动加强。当谐振成为最主要的因素时,在大约 275psi 的流体高动压下,出现了很高的振幅。
为消除高振动量级,在硬件上做出了两个改变。一个是利用叶片尾缘的非对称斜面来抑制涡脱落。第二个变化是使叶片前缘弯曲,令扭转模态频率更高,超出了工作范围,见图 16-16,此举同时降低了湍流引起的背景噪声。

图 16-16 4000Hz 下分流叶片的改进
这些改进是在进行了充分的分析和试验后才做出的,并得到水流动试验的验证。叶片尾缘的斜面完全削弱了涡脱落源头。进口叶片的改变是为了提供一个附加的安全裕度,这些修改最终在热点火试验中得到证实,所有的发动机也都做了修改。首飞于 l988 年 9 月应用在 STS-26。上面提到的两个 4000Hz 改进第一次被应用在 E0212(原 E2025)上,与未采用 4000Hz 修正的进行了直接比较,如图 16-17。这是万向节轴承加速计测得的数据,充分地说明了改型的有效性。
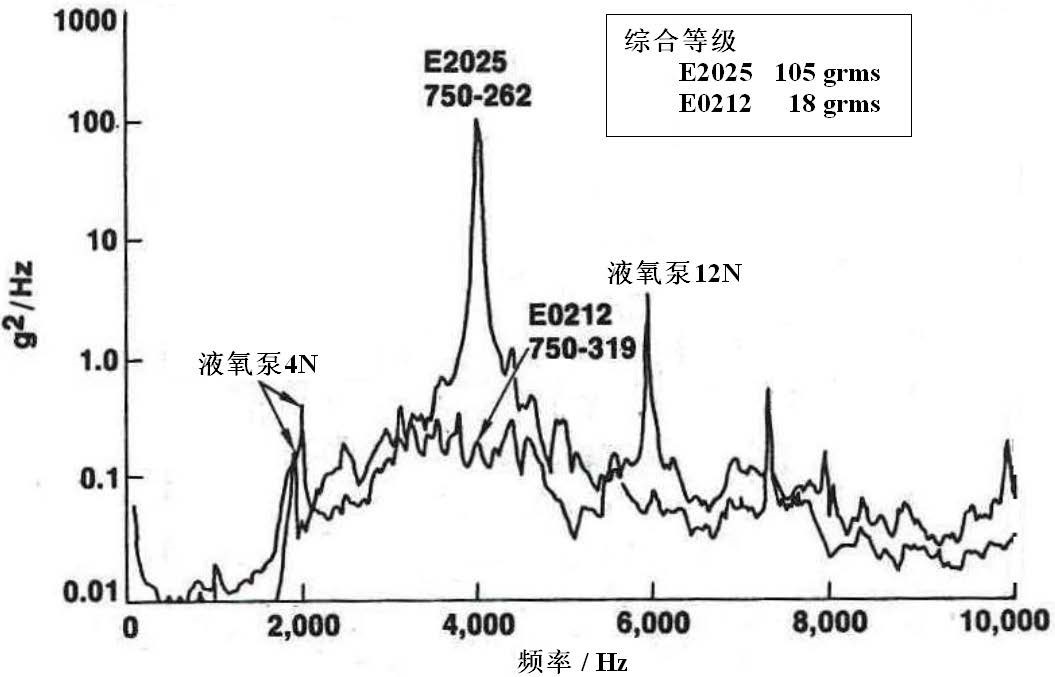
图 16-17 4000Hz 高频振动的消除
4000Hz 液氧分流叶片故障是在硬件的制造、检测都满足设计条件的情况发生的。然而,属于未知类别,是由于分流叶片设计要求不合适导致的。由于发动机能级提高了涡脱落频率并与叶片的一阶切向模态频率谐振,连同高动压工况导致了叶片的破裂。该故障在其他发动机被破坏前就归零了。
(4)SSME 其它的设计和使用问题
图 16-18 是一个 SSME 的子系统示意图,作为可用历史数据的范例。
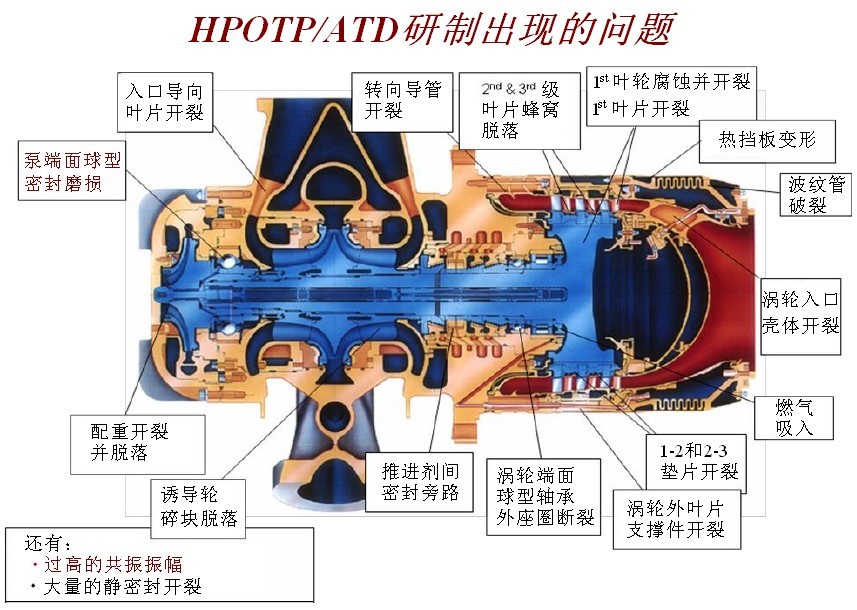
图 16-18 SSME 备用高压涡轮泵的研发问题
16.1.3 超轻的外贮箱
航天飞机用于发射国际空间站并为之提供服务,对提高航天飞机上升段性能提出了要求。航天飞机已经飞行了数年,基本是一个固定的结构,因此提高性能的主要方式就是对主要部件减重。外贮箱是减重的主要目标,减轻 1 磅就能提高 1 磅的性能(有效载荷-译者注)。图 16-19 描述了将贮箱材料改为铝锂合金而保持外部结构和体积,同时将结构变为网格正交型将能减少 7,500 磅的重量,即提高有效载荷 7,500 磅。为了完成这一巨大的改进,需要重新验证结构并进行断裂力学的研究[Neil Otte 报告,Ryan 的工作笔记]。同时,制造过程和焊缝修复过程也需要修改和验证。要求贮箱做首飞前测试并有足够的抗失稳裕度,因此,要求对每台贮箱都补充做首飞试验连同压力验证试验这种复杂的工作。得到的启示非常清楚:在项目使用阶段中改变要求增加了额外的风险和成本。

图 16-19 国际空间站在轨需求对外贮箱的影响
16.2 从启示16得到的关键信息:
高性能需求引起 高功率密度 高敏感性
不期望的交互作用 这导致了: 低裕度 高风险 高成本
使用复杂
顶住需求,努力获得健壮性。
启示 17:针对属性和成本的设计
要想取得成功,必须把属性和成本考虑在设计方案中 挑战需求和制约
贯彻实事求是的竞争理念
选择正确的方案
航天运输系统的成功与否不只是通过诸如运载能力等物理性能参数来评判,还需要考虑其可靠性、使用性以及成本等其他属性。一个成功的系统必须是从设计的一开始就结合物理性能参数考虑这些因素。为此,设计者必须给出其可得的设计参数与它们对航天器未来实现的属性和成本之间的函数关系。我们称之为:“把属性和成本结合到设计图纸中”(或现在,在 CAD 系统中)。属性和成本可随同物理性能作为系统优化的一部分。
17.1 实例:
- 航天飞机发射日 I-加载修正(DOLILU)
- 考虑全生命周期的设计
- 针对属性和成本,我们以前如何设计?
- 针对属性和成本,我们应该怎样设计?
首先看一下航天飞机发射日修正作为在初始设计中未曾预测到的使用复杂性的例子,进而比较我们在过去是如何设计的和将来该如何设计。
17.1.1 航天飞机发射日I-加载修正(DOLILU)
作为降低结构载荷的风补偿在启示 6 的平衡措施中讨论过了。之前已指出的是航天飞机打算被设计成具有足够的结构强度,以允许使用带有月平均风速偏差的轨道进行发射。由于在启示 4 中提到的空气动力异常的问题,航天飞机的强度实际上不足以在月平均偏差下发射,仍然需要测量当天风速以进行修正。因此,发射日当天的修正(DOLILU)是必须要进行的,带来了极大的使用复杂性和高昂的成本。发射日风修正带来了基于风偏差的引导参数,加载这些参数到飞行计算机中。基于月平均风修正,则可以在发射日之前完成。但发射日当天的风修正,基于发射前几小时测量的风场数据,所有这一切必须在短时间内完成[Norbraten,1992]。
图 17-1 展示了航天飞机 DOLILU 过程的一些例子。在发射前,用气球测量风向和大气参数。在负 3 小时 45 分钟时测得的风数据是平滑的,并且被用来做第一级弹道数据的修正,如果飞行中经历了相同的风况,就不会有风诱导载荷。实际上,风况在测量和航天飞机飞行之间有所变化,但是风修正将会最小化风诱导载荷。生成的第一级补偿弹道指令必须在起飞前确认,并许可加入飞行计算机中。弹道指令设置被称为 I-加载。
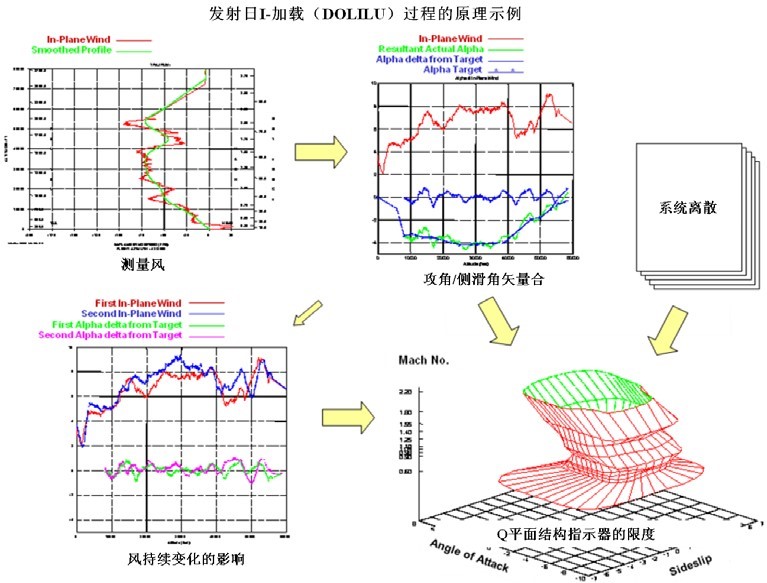
图 17-1 发射日当天 I-载荷弹道更新过程
补偿弹道剖面必须进行评估,以确保航天飞机在其剖面内飞行时,载荷不会超过结构承受能力。这就需要考虑到许多飞行参数的变化,以及在气球测量时到发射时这段时间风场的切变。这些变量被作为结构能力中的“压倒性”因素进行统计组合,以得到被加载指示边界,被称为随高度变化的动压值条件。模拟的采用 I-加载的飞行弹道必须处于这些边界条件之内;否则不能发射。另一个动压值检查采用由发射前 2 小时气球测的风矢量数据来完成。在发射前有足够的时间来保证校验,但是不能产生一组更新的设置。
图 17-2 说明了主要采用释放高空气球进行风测量的过程,得到射前 3 小时 45 分钟的风数据和其他信息,为箭上飞行计算生成 I-加载飞行弹道。出于冗余需要,两个独立的 CPU 计算机生成 I-加载弹道,并在加载前进行比较,同时箭机指令由地面系统回传
以进行确认。
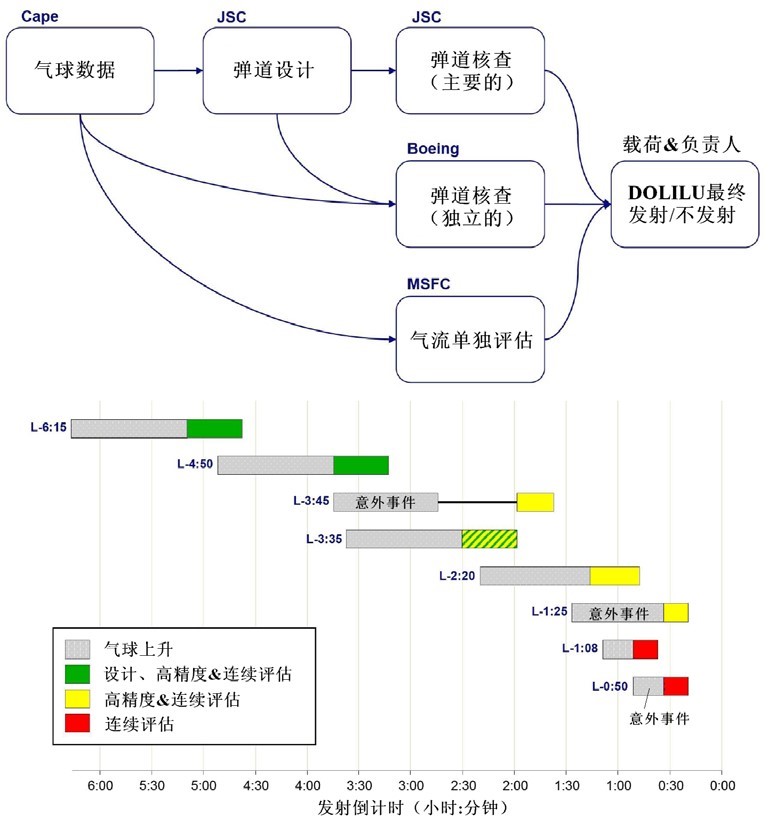
图 17-2 航天飞机发射当日 I-加载更新数据流和时间线示意图
(图 17-1 和 17-2 中的一些图引自 Brian Harrington 关于 DOLILU 运行的报告,2005 年 4 月 20 日,美国)
尽管这一过程在早期的 DOLILU 中已经被流程化,但使用流程仍然非常复杂,需要极大的工作量。因为航天飞机不具备结构健壮性,为达到可发射的安全性,系统需要付出很高的使用成本。这个例子说明了发生在使用过程的复杂性,而不是在最初计划中的。
17.1.2 考虑全生命周期的设计
过去我们主要把设计关注度集中在飞行器的物理性能上,然后针对使用特性、可靠性和成本对设计进行评估。所谓全生命周期设计,意味着设计不只考虑性能,同时也考虑属性和成本。
图 17-3 说明了一个典型的设计方法表,如何评价系统性能、使用特性和成本等。内容可以分为三类:(1)性能,描述了系统的物理表现;(2)属性,包括了安全性,可靠性,可加工性和使用特性;(3)成本,包括了不同的评价成本。因为我们的系统是高度融合的,改变一个就会影响其他,不论在同类中还是其他类别中。
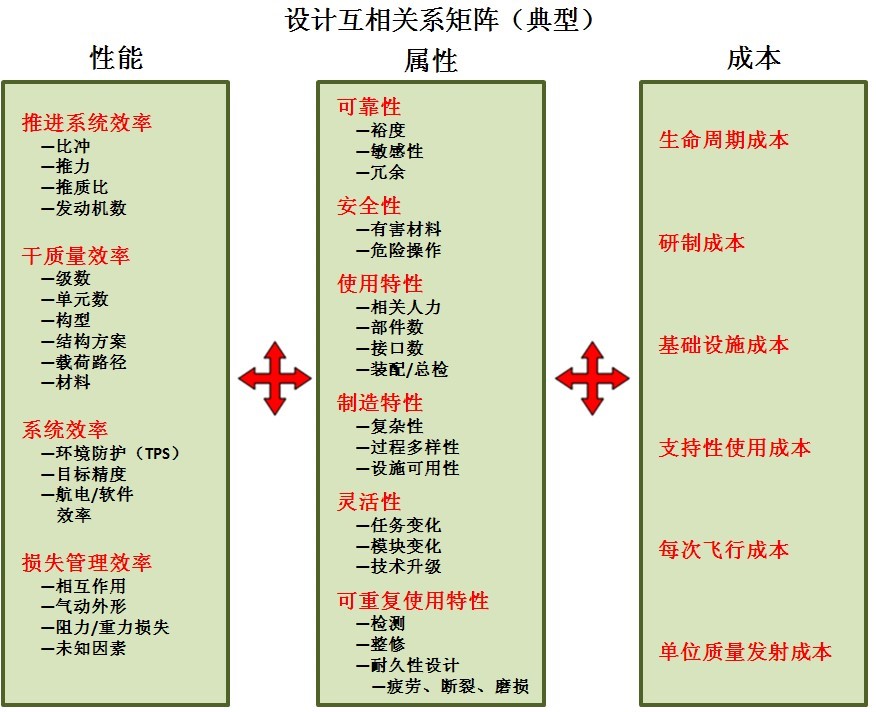
图 17-3 设计的相互作用
为了得到一个满足属性、目标成本、还有性能的平衡设计,我们必须把一个系统设计/优化方法放置在全生命周期的各方面来考虑(图 17-4)。
- 为了满足除性能之外的使用特性、成本和其他目标,我们必须把设计方法贯穿生命周期的所有方面
- 目标:当达到必须的安全性的同时,随之性能、属性和成本也得到了最佳平衡

图 17-4 考虑全生命周期的设计
- 针对属性和成本,我们以前如何设计?
图 17-5 中描述了以前的设计方法,说明了性能迭代设计的初步方案,然后针对属性和成本进行随后的优化和调整。这些属性和成本是难以评价的,比评估物理属性还要来得困难。这一过程是迭代和螺旋上升的,由此产生一型次优设计。
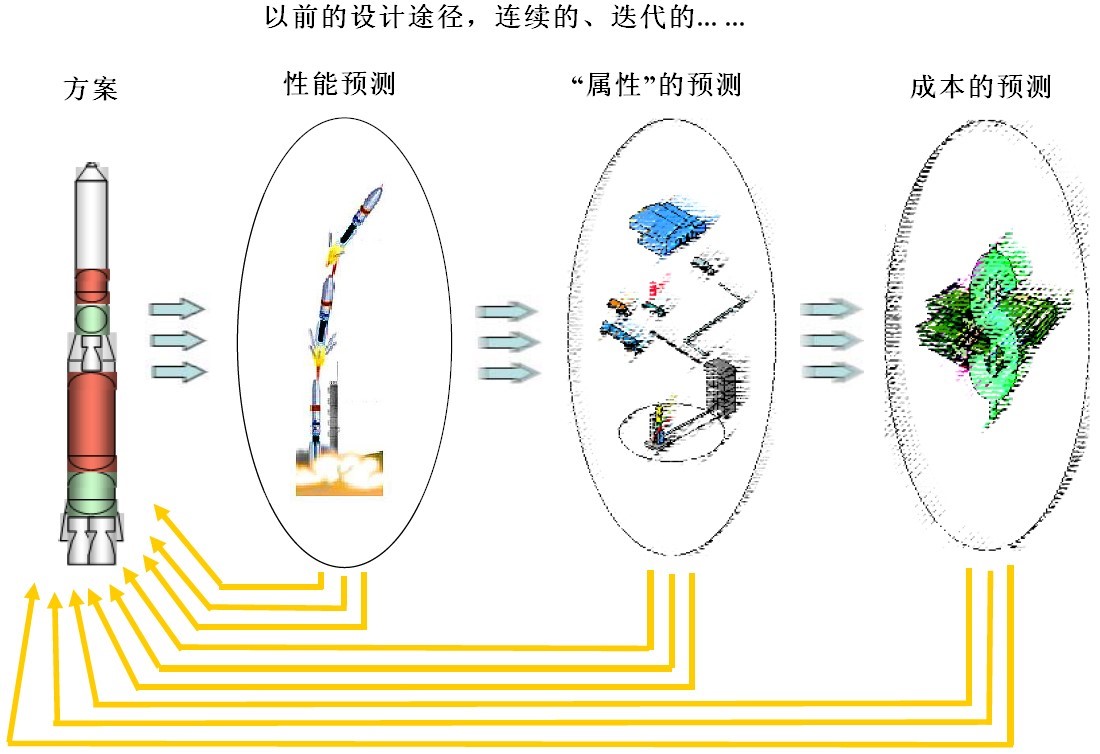
图 17-5 以前的设计方法
- 我们如何针对属性和成本设计?
所需的是一个复杂的强调下游的过程,各种属性、成本与性能同时考虑。如前所述,
“把属性和成本摆到设计桌面上”。为此,需要提供参数间的关系给设计者,例如成本估算、使用特性、可靠性、可制造性等,作为设计参数的函数,从而设计者可以选择(图 17-6)。图中所显示的另一个设计过程的改进是系统整体分析,包括的子系统、设计函数和学科函数的联合分析,目前这些子系统之间的内容是分割开来的。

图 17-6 期望的设计方法
图 17-7 抽象地描述了属性/成本和设计参数之间的功能关系,能带来理想的方案评估过程。这里不同方案或者设计被映射到一个包括特定的度量区域内(图中作了简单的三维显示)。比较和改进的方向被直接统一到设计中,贯穿整个生命周期。
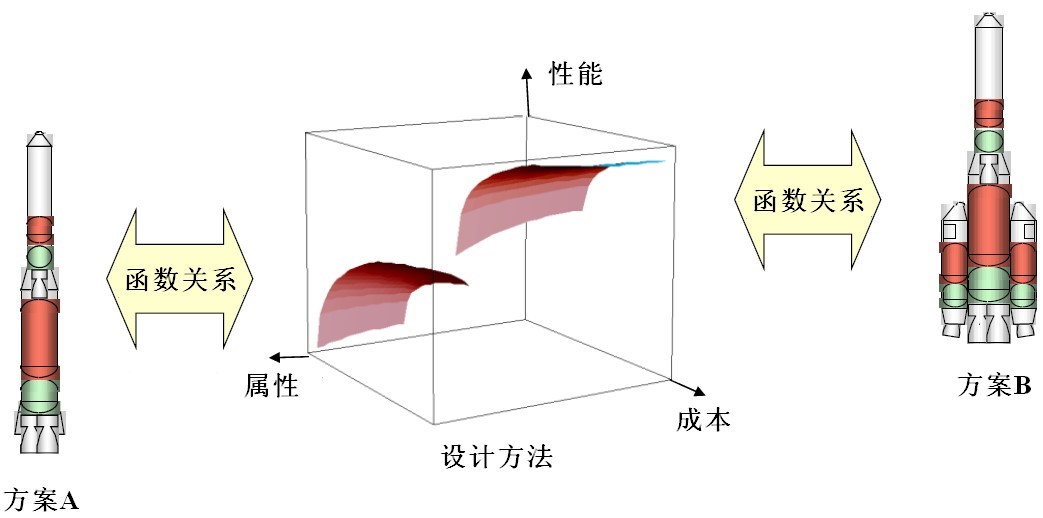
图 17-7 函数关系能得到多方案的设计构型
得到这些上述过程需要的功能关系式是一个挑战,因为目前仅有一些是可用的。基于历史和其他数据,技术领域的人们应当识别与属性、成本以及设计变量相联系的函数关系式,从而朝着把特性和成本“设计到”属性和性能中而努力。
17.2 从启示l7得到关键信息:
朝着把特性和成本“设计到”属性和性能中而努力。
准则 VII:试验和验证在研发中至关重要
试验和验证是产品研发过程中的中心活动。其重要性体现在项目成本的大部分最终都耗费在试验和验证工作上。该准则将在下述的几个启示中得以体现:
18.答案就在硬件及其数据里
19.要么现在试验,要么将在以后试验
20.独立分析、试验和设计是成功的关键因素
21.所有的分析和试验都有局限性
22.缩比是个关键问题
启示 18:答案就在硬件及其数据里
研判硬件及其数据-答案就在那里:
不要看到什么都理所当然
挖掘隐藏的信息 真正的系统是硬件和软件——它不是系统的分析模型或想象模型。我们必须面向实际的硬件和软件,找到对系统实际行为(特性)的答案。
工程师在拓展其业务能力时,处理实际硬件的经验是无可替代的。硬件经验可以从制造、装配、试验(研制试验、鉴定试验、验证测试、硬件循环模拟等)以及飞行经验中获得。参与设计/研发过程的人员应充分利用每次机会获得硬件经验,以理解真实系统的实际情况。
在试验和飞行过程获得的硬件检测结果与数据是了解实际系统的关键。通常事物的表象下蕴含了更多的信息,深入挖掘数据,并解读信息。如果数据不符合预期,人们第一反应常常是假设数据有误。应抵制这种反应——数据通常是有效的,它包含着关于真实系统的信息。要寻找潜藏的信息,不要为你看到的情况找辩解而轻易放过它。
18.1 实例:
- 第 51 次发射挑战者号失败
- 哈勃太空望远镜镜片变形
(3)X-33 液氢燃料贮箱故障
18.1.1 第51次发射挑战者号失败
1986 年挑战者号在航天飞机第 51 次往返任务中的失败为我们提供了一个样本,即需要密切留意硬件及数据所反映的信息,不应低估任何可能是失败先兆的异常现象。第 51 次任务失败及其原因已经被广泛记载无需赘述,在此仅就与本准则相关的几个方面加以提示[Rogers,1986]。
固体火箭发动机(SRM)现场对接的最初设计存在一些固有缺陷,这些缺陷在起初并不明显。当发动机点火后,压力增大导致接口密封面快速开口变形(参见图 18-1)。第一道和第二道 O 型密封圈的密封面显示了此特征,尽管第二道的偏离比第一道的要小,但两道密封并不提供相互独立的冗余。油灰被用做两段之间的绝缘接触面的绝热层。各段组装连接时,密封处进行了气密检查,滞留的空气常常导致油灰中出现气孔,成为燃气到接头的通道。根据通道的扩展范围,某个具体连接点、O 型圈和其他变量的响应,炽热的燃气会影响 O 型圈,导致出现热影响区和侵蚀。

图 18-1 STS 的第 51 次任务中固体发动机安装接头和间隙偏差
在第 51 次任务之前,固体火箭发动机的O型圈接口在飞行中就出现过几次故障,固体发动机燃烧的炽热气体穿透了分层间油灰的缝隙并对O型圈产生了影响。这些异常现象被评估过,但由于在后续的飞行任务中反复出现,被归类于经验领域而被合理化了。这是把异常现象正常化且对迫在眉睫的问题未采取行动的一个实例。调查委员会的成员,J.R.Thompson评论说:“它一直向我们眨眼。”
图 18-2 取自挑战者号事故调查委员会的最终报告。委员会的工作人员总结了 O 型圈损坏与温度之间的相互关系。上面的图表展示了 O 型圈故障次数与温度的关系。仅凭这些数据本身并不能清晰地显示故障与温度的相互关系。但将没有故障的飞行数据放在一起,如下面的图表所示,不同的情况出现了,与温度的关联性就更加明显。本启示就是在做决定时一定要考虑到所有的因素和信息。
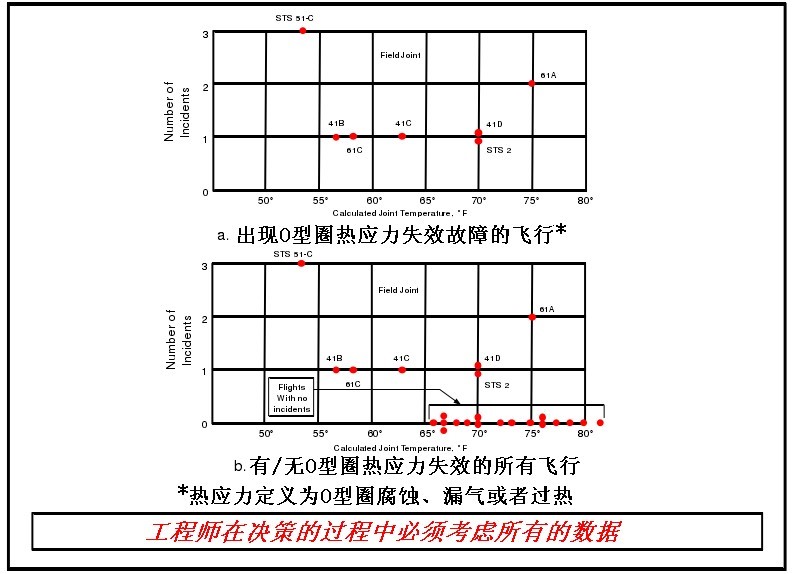
图 18-2 固体发动机安装接头飞行数据——热失效事件与温度关系图
绝大多数失败都有不止一个原因,第 51 次发射任务也同样如此。在固体发动机点火并增压发动机壳体时,U 型密封接合部空隙打开,超过了一道和二道 O 型圈在低温下弹性响应及保持接头密封的能力。另外,还有几个因素导致了这一固体发动机接合部的失效。尽管依赖作用在 O 型圈的压力达到密封效果并不被认为是好的设计,但环绕 O 型圈及 O 型圈之下的压力,对于材料弹性有帮助,使大多数固体发动机接头密封。固体发动机上 O 型圈开槽的容差使 O 型圈的两侧可以接触到凹槽,阻碍了压力起作用。另外,榫和槽的相对直径也是因素之一。当固体发动机壳体重复使用并进行验证试验时,它的直径会有轻微的永久性的变形。在第 51 次发射中出现故障的接头上的榫边缘已经使用过多次,使得榫密封表面和槽密封表面可能接触,将 O 型圈压进凹槽,减少了压力作用辅助的可能性(图 18-3)。问题应该是“真实的硬件是怎么样的呢?”而不是依赖
理想化的方案或模型。
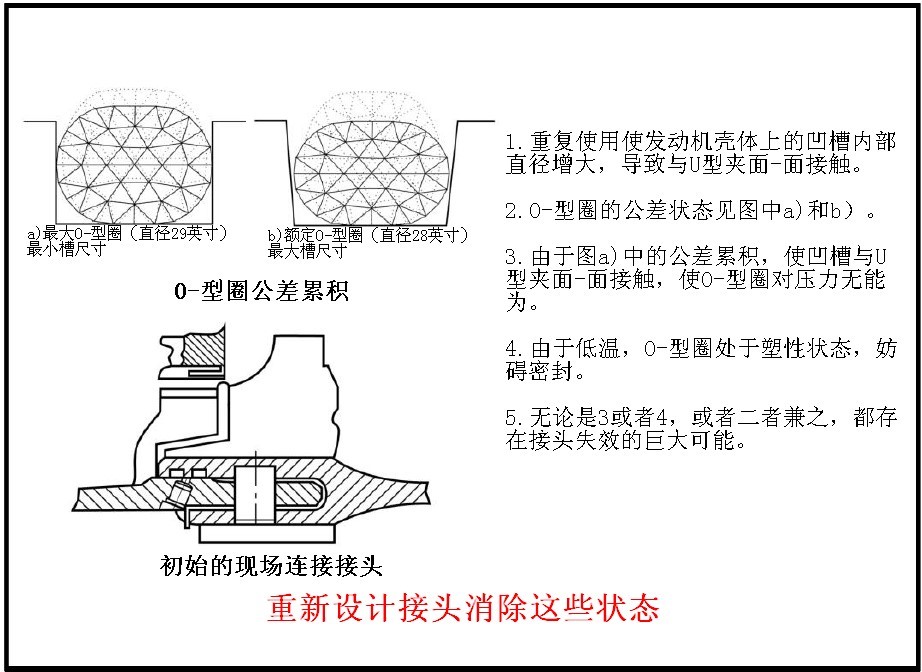
图 18-3 STS 的第 51 次发射任务中安装接头-O 型圈/槽公差的影响
事故后,固体发动机接头进行了重新设计,纠正了原来的多个缺点,并针对接口断裂设计了多层保护措施[Perry,1989 年]。这些改进包括使增压中打开的间隙大幅缩小的榫/槽配合特性、凹槽容差,更好的密封检查测试、更好的绝热层密封、接头加热元件和更好的组装程序(图 18-4)。此后,该更新设计运行良好未再出现密封问题。

图 18-4 RSRM 安装接头的新设计
18.1.2 哈勃太空望远镜镜片变形
1990 年 4 月,哈勃望远镜(见图 l8-5)由美国发现号航天飞机(STS-31)送入太空
轨道。哈勃望远镜重 24500 磅,主镜片直径 94.5 英寸。轨道接近圆形,高度 347 英里,倾角 28.5 度,绕行一周 96/97 分钟。

图 18-5 哈勃太空望远镜
哈勃望远镜发射升空后,发现其主镜片打磨不正确。确定如何修好镜面系统以及镜片打磨如何不正确花费了大量精力。在设计哈勃望远镜时就建立了一种在轨维护的方法以便后续的维护。1993 年进行了对哈勃望远镜的第一次维修,这次维修用了十几天的时间安装了几件仪器使哈勃望远镜恢复其全部功能。
在镜片的制造过程中,曾进行一些测试以确定镜片的形状。在测试光学镜片表面时,用新的“完美高级”的反射零值校正器测得的数据显示镜片磨得十分完美。但在安装镜片和反射零值校正器时,为使反射零值校正器与来自 NBS 精密校准金属棒的激光反射相吻合而预先放置了一个垫片,由此产生了一个 1.3 密耳的空间误差。因此无论怎么检测镜片都是完美的,但实际并不是。
制造过程中还进行了其他表面测试,其中包括用倒转零值校正器和折射零值校正器。这两者的测试结果都显示镜片有缺陷。然而,镜片的制造商,Perkin-Elmer 公司,更喜欢“完美且高级”方法,而忽略了这些结果[Allen,1990]。
从这个经验可以得到以下几点,参见[Chapman 等,l 997 年]。
- 有疑问的测试结果未被理解且被忽略了;
- 没有独立检查的要求;
- 未对比柯达的镜片并择优使用;
- 没有系统测试的要求;
- NASA 未将深入监管进行到底。
18.1.3 X-33液氧燃料贮箱失效
为抵达轨道,单级入轨运载器性能效率上要求非常高的质量分数。实现这种结构效
率的方法之一是采用复合材料的低温推进剂贮箱,这是一种实现高质量分数的新技术。为了开发和演示该项技术,设计了 X-33 燃料贮箱。X-33 液氢贮箱在低温条件下的验证试验中失效了。贮箱壁设计是 13 层复合内层缠绕在一个标准内胆上,1.5 英寸厚的蜂窝状绝缘层和 7 层外表面(面板),如图 18-6 所示。
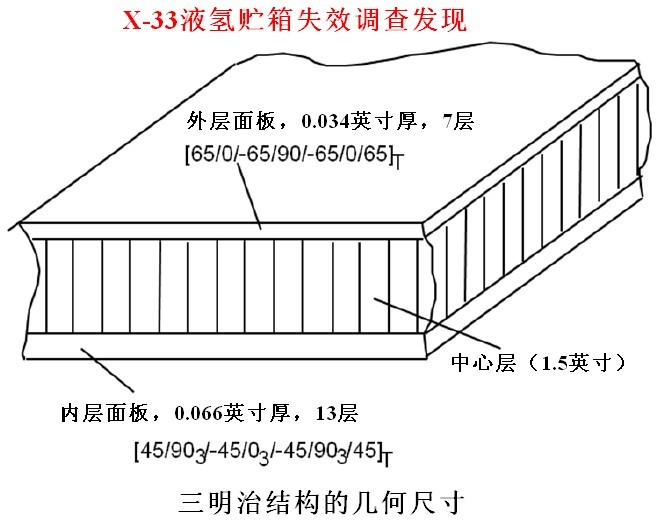
图 18-6 X-33 燃料贮箱的三明治几何结构
蜂窝状结构的内层板和外层板的设计在制造中出现过问题。加工测试过程用的是 2 平方英尺的平板,然后制造了第一块全尺寸的板。当把它从热压罐中取出放置于地上时外层的板脱落了,专家组对此进行了调查。经过调查了解到由于涂抹粘合剂与热压罐固化之间存在时间差,用于将板固定于整个蜂巢结构的粘合剂的质量降低。于是重复加工过程。同样,大家都知道并担心在飞行中出现低温排气效应而导致故障。因此专家组也建议降低TRL水平,并在燃料贮箱的低温验证试验中增加特殊仪器以确保不会出现低温排气效应或其他潜在问题。
该项目建造了两个飞行状态液氢贮箱,并将它们送到 MSFC 进行了低温和结构载荷验证试验。试件上安装了专门的仪器,在蜂窝状结构中安装了热应变测量仪和压力表。采用了液氢、飞行状态贮箱增压系统和模拟飞行状态下的相似载荷进行了第一次试验。试验后,燃料进行贮箱排放,在贮箱泄压过程中外层面板被吹落。基本的原因并不是原来预想的低温排气问题,而是由于氢气通过内层板的微小裂缝穿透了内层贮箱壁,使得蜂窝状结构中充满了液氢。试验完成后,贮箱中的液氢排尽,但残留在蜂窝状结构中的液氢升温并气化后,将燃料贮箱的外层吹落(参见图 18-7)。
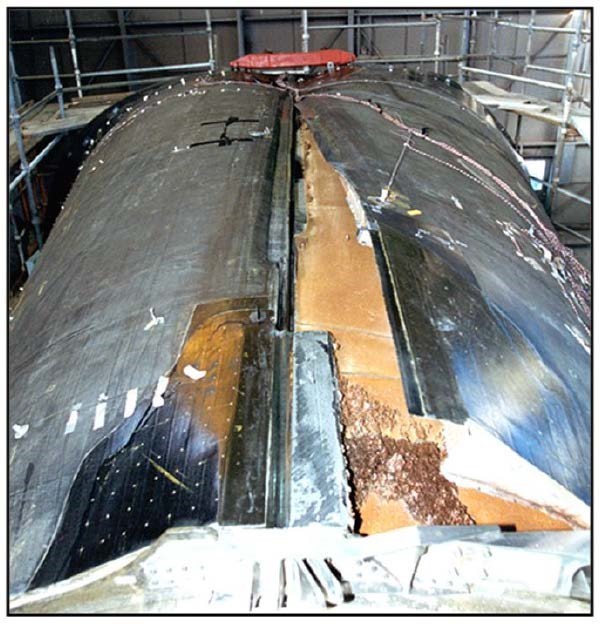
图 18-7 X-33 失效燃料贮箱
气体侵入蜂窝状结构的原因是内壁的细小裂缝,这些裂缝是外壁处于外界环境而内壁处于-420℉的低温的热变形以及燃料贮箱内压引起的应力造成的。图 18-8 显示的是不同位置处贮箱和蜂窝状结构内的压力情况。粗线表示的是试验过程中箱内压力的实际情况,细线则是不同位置处的蜂窝状结构内的压力情况。可以看到,蜂窝结构内的压力并不跟随着贮箱内压力上升,而是在出现微裂纹时开始上升。随着贮箱内推进剂的排尽,蜂窝状结构内的压力开始下降,直到内压足够低而微裂纹被封闭,此时蜂窝结构内压力将持续上升,直至外层脱落。该现象在南方研究所对小型面板试验中复现,同时 LaRC 工程师使用复合材料的疲劳分析模型方法从理论上也复现了该问题。

图 18-8 X-33 失效贮箱中的压力图
X-33 液氢燃料贮箱失败调查发现包括:
- 制造过程中的缩比是一个主要的验证手段;
- 在热压前粘合剂过期造成强度损失;
- 在将贮箱付之设计和制造之前,复合材料的微小裂纹未能引起重视;
- 设计连接件来削弱推力载荷对设计和制造是一个巨大挑战;
- 验证新技术通常需要全尺寸样机试验。
18.2 从启示18得到的关键信息:
从实际硬件中获得经验无可替代。严密思索它所告诉你的信息。
启示 19:现在试验或将来试验
试验是设计过程中的一个必不可少的要素
“试验要飞行的,飞行试验过的。”——Jack Bunting,洛克希德马丁 研制和验证试验是设计的核心
试验应是个搭积木方法,即从缩比到全尺寸,从组件到系统 需开展不同类型的试验:研发、鉴定、验证、证明、验收 试验并不比用过的假设更好
试验是所有高性能系统必须进行的环节。如本章节标题所言,“不在现在试验,就要在将来试验”。这句话是说,如果尚未进行充分的试验,那么在产品使用的最初阶段首先就是一次试验。另外,试验无法完全复制产品实际使用时的综合环境,因此对于大多数系统而言,其最初几次使用都属于研制试验阶段,而这也是系统第一次经历真实的综合环境考验。这对运载火箭而言尤其如此,运载火箭必须穿越复杂多变的自然环境及诱导环境。以下将在“试验是设计过程中关键要素”的大原则下着重强调几个试验和验证的基本原则。
洛克希德马丁的 Jack Bunting 说,“试验要飞行的,飞行试验过的。”也有人说,“研发和验证试验是设计的核心”。研发试验能够使你在系统建造前就对系统有所了解,并将一些特性整合到设计中;验证试验则是对已建造好的系统,确定其设计是否能满足系统要求。试验最好是按照模块化方法来开展,由此,才能了解组件和系统,以及系统和系统之间的相互作用关系。在当前的世界里,由于成本的限制,省去了很多这种模块化试验和/或最终的系统试验。这实际上给首飞带来了更多的风险,且可能导致按照节省原则制造出来的产品状态需要进行设计上的变更。这一原则在大部分的航天飞行工程中都有所体现。电子设备、机械装置及其机构至少要经历 6 种类型的试验:研发、鉴定、验证、证明和验收。任何试验终究都是建立在一系列的假设基础之上的,因此,没有试验
能够超越在试验中对试验硬件、试验条件和试验环境所做的假设情况。
试验类型以下是航天系统通常采用的试验类型:
- 研发试验
- 鉴定试验
- 验证试验
- 加工工艺保证试验
- 验收试验
- 系统集成及验证试验
- 飞行状态点火试验
- 其他试验(飞行试验等)
研发试验是指贯穿整个工程设计周期开展的试验,用于获取系统特点的基本信息,以便整合利用这些特点并且处理诱发的情况。试验包括风洞试验、缩比模型动态特性试验、热试验、材料试验、部件振动试验、声学试验等,是掌握整个系统特性的基础。其中,部件振动试验和热真空试验可以发现产品的设计缺陷,以在产品最终设计完成之前得以完善。
鉴定试验通常是飞行类型或是飞行硬件在至少 3σ水平的环境条件下试验,而组件完成某些飞行类型的功能。这类试验后通常会进行小的改动,如果进行了改动,通常情况下需再次重复进行试验。
验证试验通常用于诸如液体推进剂系统的发动机类产品,可以通过使用飞行硬件和飞行操作程序模拟的飞行条件下进行的地面试验。例如,航天飞机主发动机的验证要求两个相同的发动机,在飞行剖面和操作程序下试验 20000 秒。在验证试验过程中遇到的一些主要问题要进行部件改进,并重复进行验证试验,或者在豁免和操作限制下进行发动机飞行试验。
加工工艺保证试验通常适用于固体火箭发动机和火工装置。这类硬件要么非常昂贵要么会在测试中毁坏因此并不适合生命周期测试。在飞行前,测试过程通常由一些(如 5 个)发动机或装置组成。在使用程序中,发动机或装置定期地从生产线上选出,开展试验以确保制造过程依然满足要求。
验收试验通常适用于电子装置和机构,在它们下生产线的时候每个单元都要被测试。这类试验并非是全飞行周期,而是简化环境下开展。这类测试是为了消除制造过程中或早期阶段的致命缺陷。参加飞行任务的液体火箭发动机的验收试验是以短时间热点火的方式进行测试。在航天项目的不同阶段,安装在火箭级上的发动机(动力系统试车)通过地面的短时间热试来了解和掌握发动机与主推进系统之间的相互关系。
系统集成及验证试验有许多类型,是为了检查全系统、验证分析模型及诱发的环境条件。以下是运载火箭集成试验的部分内容列表:
- 硬件集成和检查;
- 全箭地面振动(动态)试验,以验证动力学模型;
- 动力系统试车了解发动机和主推进系统单元和软件之间的集成协调性;
- 使用硬件和软件的电气综合测试;
- 大尺寸风洞验证试验,以测试气动和热环境。
采用液体推进系统的运载器,可以在发射架上进行短点火时间的点火飞行状态试验。该试验可以检查相对于之前配置有过任何主要状态变化的 MPS 系统(主推进系统)。运载火箭研制程序的最后一项试验是飞行试验,开始两到三次飞行试验是确定综合环境的重要手段,达到了以上试验不能达到的目的。飞行试验可以发现在上述试验中不能发现的许多重要问题。下面对之前航天系统研制中的一些主要试验进行讨论。
19.1 例子:
- 土星 V 号的动态试验
- 航天飞机的动态试验
- 动态试验影响的总结
- 空间站的静态和动态试验
19.1.1 土星V号的动态试验
土星 V 号不仅开展了缩比模型的动态试验,而且也进行了全尺寸模型的动态试验。全尺寸动力学试验是全箭或箭体各级在自由-自由边界条件下的动态试验。在侧面面板上,通过研制一个液压轴承来形成一个自由-自由边界。使用乒乓球来模拟液氢,用水来模拟液氧。对于平台的模态采用著名的“网球鞋试验”来验证,试验中工程师去到设备的顶端,用脚推动激发一阶弯曲模态。穿着网球鞋用来保证不会损坏到指令/服务模块。 有一些问题可以在自由-自由全尺寸的动态试验中发现,包括速率陀螺仪连接件的过大的转动变形(如在启示 5 中所述)。这需要在设备单元(IU)中将速率陀螺仪移动到变形较小的区域。总体而言,所有试验的横向模态和分析预测结果关联性很好。本节末的表格涵盖了所有在 MSFC 进行的动态试验中获得的主要发现[Grimes 等,1979]。
19.1.2 航天飞机的动态试验
图 19-1 示出航天飞机轨道器正吊装到动力学试验平台上与外贮箱以及固体火箭助推器进行匹配的情况。同时也示出航天飞机所进行的各种动力学试验,以及复杂的航天飞机构型基本特征,该构型包括采用前、后接口连接的四段箭体。这导致在 20Hz 以下大约有 200 个弯矩模态[Jewell 等,1980]。

图 19-1 航天飞机轨道器正被安装到动态试验台中
初期,认为全尺寸动力学测试是可以不做的,而且这样还可以节省大约 2 千万美元。验证试验正确性的方法是基于风险认识以及一些用于响应和稳定性设计的多种定律。通常而言这些定律包括:
- 控制响应和稳定性
- 动力学响应及载荷
- 空气弹性变形
- POGO(纵向耦合振动)
图 19-2 说明各种动力学试验是如何提高置信并降低飞行中 POGO 风险的。相似的图表也被用于上述提到的其他领域的定律分析。综合考虑这四种风险降低途径和它们对系统复杂性的影响,以及如果试验不完整带来的风险,可知开展动力学试验是合理且必须完成的。

图 19-2 POGO 置信因子随着试验而增加的关系
对于稳定性分析的 POGO 分析模型和解决 POGO 的设计中有一个非常重要的验证试验,就是 LOX 贮箱全尺寸静力学水试。然后,经过校准的模型与通过 MVGVT 验证的全箭模型进行组合。用水作为介质模拟各种飞行条件的全尺寸 LOX 贮箱试验是一项非常重要试验。试验装置图见 19-3。第一个试验状态是一台满的贮箱,当液态弹性模态被激发出来时,在该模态下基本上是无阻尼的。当贮箱处于低充填状态时,就是这种情况。直到箱内液位到达了全箱 2/3 液位时,阻尼就达到预期的值。

图 19-3 航天飞机液氧贮箱液压弹性试验配置图
图 19-4 中阻尼和液位的关系是对上述讨论结果的说明。一旦试验条件下模型得到确认,将用 LOX 代替水用于分析模型。用 LOX 替换水将结构从流体模态中解耦,就不要飞行标定了。结果表明动力学耦合的敏感性和实施搭建模块试验方法的必要性
[McComas,1980]。
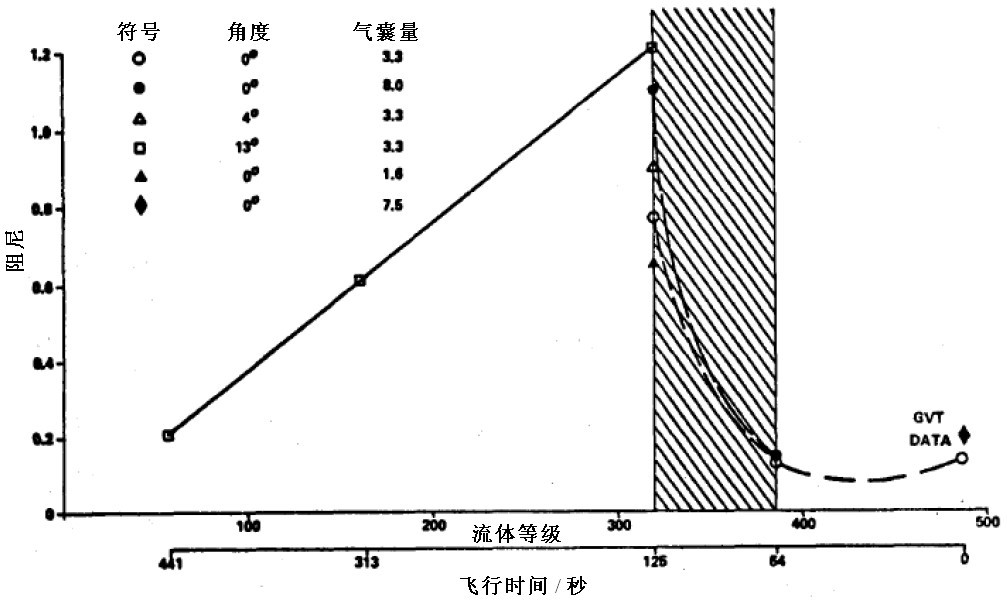
图 19-4 航天飞机液氧贮箱的推进剂阻尼图
19.1.3 动态试验影响的总结
下述表格(图 19-5)是动态试验的经验及其对工程影响的总结[Jewell 等,1980][Emero,
1979]。第一栏是试验项目,第二栏是发现的问题,第三栏是硬件影响,最后一栏是未发现问题的后果。第一项是早期提到的土星 V 号仪器舱局部变形,以及如果没有发现的话,存在弯矩模态控制耦合不稳定的潜在影响。
动态试验影响(a)
|
试验项目 |
发现的问题 |
对硬件的影响 |
若没发现的后果 |
|
土星 5 号 DTV |
飞行陀螺仪支撑板发生局部转动。飞行器动态剪切应力和力矩使支撑板变形。数学 模型预测到此变形为 135%。 |
陀螺仪被重新固定在支撑板的底部,使得局部的转动小了很多。需要新长度的束线。飞行控制滤波电路重新设计。 |
飞行控制不稳定将引起飞行器损失 |
|
MARL |
IU 稳定平台的设计缺陷。稳定平台和 IU 环形舱之间的耦合产生了一个机制——声学能量驱动加速器无法停止工作。 |
在平台上增加短的槽型加强 筋。在后来项目增加了隔音材料和和软件测试。 |
大的制导错误可引起月球任务的失败 |
|
土星 5 号 DTV |
CSM 接口的设计缺陷。单个扭转摆动支架,在指令舱扭转运动与 S-IC 发动机偏离间 产生了不可预测的高度耦合。 |
在发射台上,在 AS501 上加装几个额外的扭转支架。随后,重新调整F 1发动机节流状态,减少发动机关机时的载荷。安装了发动机预判程序,万一发动机失效,可用以保持结构完整性。 |
CSM 的结构失效 可引起飞行失败和可能的人员损失。 |
|
土星 5 号 DTV |
SPS 贮箱支撑的设计缺陷。在 SPS 贮箱支撑和贮箱封头支撑之间,检测到预期之外的局部高共振耦合。 |
SPS 贮箱的上部支撑托架被重新设计,以减少强贮箱悬臂模式。 |
硬件失效导致任务失败和可能的人员损失 |
|
土星 5 号 DTV |
液氧和燃料贮箱底部动态压 S-IC POGO 归因于高的贮箱压力高。这些压力被低估了, 力因子为 2。直到 POGO 在 AS 502 出现后,这些压力才被理解。 |
由于 POGO,潜在 飞行器和人员损失 |
|
动态试验影响(b)
|
试验项目 发现的问题 |
对硬件的影响 |
若没发现的后果 |
|
|
S-IC 横向有 18Hz 高的模态增土星 5 号 DTV 益。DTV 数据表明不应该在发动机内部使用缓冲器。 |
去除了内部的发动机缓冲器 |
由于在 18Hz 缓冲器模态和 18Hz 横向模态中间存在 POGO,存在飞行器和人员损失的可能性。 |
|
|
土星 5 号短排气道 |
由月球模态引起的高强度俯仰 /纵向耦合,使 S-IC POGO 增益因子提高了约 30%。这种影响与不可预测的贮箱压力耦合,是不可预测的 AS-502 POGO 原因。 |
开发和安装外部液氧缓冲器 |
由于 POGO 不稳定性,存在潜在的飞行器和人员损失。 |
|
土星 5 号袖珍 A/C |
确定了引发 S-II POGO 的机 理。在前四个液氧贮箱水弹性模态和 18Hz 中心发动机横向模态之间的耦合产生了 POGO 不稳定性。 |
给中心发动机开发了一个缓冲器。也开发了一个备份发动机关机系统。在试验期间开发了精确的数学模型,用以支持后期大量的飞行器推力结构设计,不需要进一步的试验。 |
由于 POGO 不稳定性,存在潜在的飞行器和人员损失。 |
|
太空实验室 ATM 测试 |
在纵向和侧向运动之间的强耦 合,显示出在 S-IC 关机时可能的结构失效。 |
开发了 1-2-2 发动机关机硬件和软件,用以减少 ATM 硬件失效,存在任务的纵向输入。开展了硬件的 失败的可能性重新设计,而且它们被进一步的研究被证明是必须的。 |
|
通过直到飞行器接口的 ATM 通过整个太空实验室发射太空实验室的 横向耦合反应,ATM 的强横向 结构的试验,证明了 1-2-2 模态分析 耦合被证明是减弱的而不是增 改进是足够的,不需要进行强的。 硬件改变。
通过在 1-2-2 关机下验证结构整体性,该试验节省一个可能的 ATM 再次设计
动态试验影响(c)
|
试验项目 |
发现的问题 对硬件的影响 若没发现的后果 |
|
航 天 飞 机 MVGVT |
SRB 安装的速度陀螺仪显示了 需要进行结构的重新设计, 异常的高传递函数。安装在 飞行器控制不稳定以加强 SRB 环形框架,修 SRB 前部环形框架上的速度陀 并可能导致飞行器正了固有共振频率和降低 螺仪在固有频率和高增益下产 损失了增益。 生共振,对飞行控制非常危险。 |
|
航 天 飞 机 MVGVT |
SSME 轴向频率和振型与之前 对 SSME 发动机,需要建立 的分析不相关。在之前的试验 POGO 稳定性分析会新的三维非对称数学模型。 分析中运用了对称的半结构动 被质疑。 不需要进行硬件改变。 态数学模型。 |
|
航 天 飞 机 MVGVT |
速度陀螺仪试验值显示出比分 提高了裕度管理软件级别 析更大的响应振动。在 RGA 之 飞行器控制不稳定和循环计数器等级。在第一 间的响应偏差比那些用在分析 并可能导致飞行器次传感器失败后修改了错 研究中的大得多,这些分析用 损失误的隔离程序。 来确定裕度管理级别。 |
航天飞机四分 SRB 内部压力对刚度的影响超 对接口备份结构改动较小 潜在的接口失效和
之一缩尺寸 过预期。 的重新设计进行复合冲击 飞行器损失
图 19-5 动态测试影响图
19.1.4 空间站的静态和动态试验
为确保人员飞行安全,要求在空间站上的所有有效载荷都必须经过动态试验。完成这个试验需要一个固体夹具提供刚度很大的连接形式,将轨道器货舱固定其上。这个重型钢制夹具固定在 20 英尺厚的混凝土里,确保不会移动,以提供准确的边界条件。试验装置见图 19-6。该夹具用于解决与有效载荷连接到航天飞机轨道器上相关的任何不确定的问题。它提供了有效载荷与轨道器之间连接的正确的仿真边界条件。此试验提供了数据来验证动力学模型,使其在设计中得以正确应用,以确保全体宇航员的安全[作者的工作文件]。
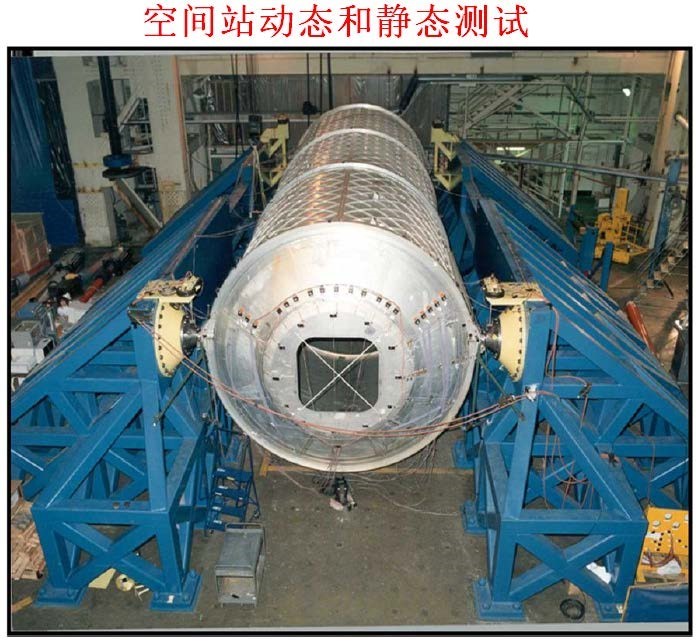
图 19-6 空间站舱段测试装置图
19.2 从启示19得到的关键信息:
试验要飞行的,飞行试验过的。
启示 20:独立分析、试验和设计是成功的关键
复杂系统需要独立分析、试验和设计;这加强对系统深入的了解。
航天系统如此复杂,不是一个分析、一个试验就能给出所有答案的。
人们的创造力是解决问题的源泉。开始时,需要假设和评估不同的解决办法。
我们必须对其他观点持开放态度(集思广益)。 在设计和研制过程中,一些问题超出我们的经验范围。这些问题一般发生在那些高能量密度系统以及系统限制被放宽时。火箭推进系统中,燃烧室高温和高压而尺寸减小(质量减少)的效应就是一个例子,其间存在的问题是可以预期的。结果是,为了避免灾难性的事件,独立分析、试验和设计对于提高对系统的认识是非常必要的。大多数情况下,机理都非常复杂,没有任何一个分析、一个试验就能够给出所有的答案。想要掌握复杂的情况,必须采用多重的试验、分析,尤其吸收人们的创造力。在这个过程中,工程师必须直面所有参与者的观点与疑问,这是博采众人智慧去解决难题的一个过程。
20.1 例子:
- SSME 旋转解决方案
- SSME 液氧泵轴承破碎
- SSME 氧化剂主阀低频噪声解决方案
20.1.1 SSME旋转解决方案
在 SSME 的研制过程中,燃料涡轮泵、液氧涡轮泵经历了转子动力的旋转不稳定现象。当一个系统处于转子动态不稳定状态时,转轴就会向前或者向后发生进动。图 20-1
给出的就是轴系旋转不稳定的一个实例。
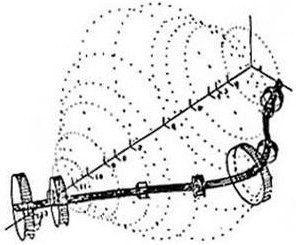
图 20-1 涡轮泵打转
在此图中,轴按照一定的需求速度围绕其中心线旋转,即同步频率。与此同时,发生了进动运动,在图中表示为弯曲变形的形状。弯曲变形形状的旋转速度(频率)就是进动速度,通常它是次同步频率状态。对于线性系统来说,该频率一般是系统固有频率之一。次同步和同步频率之间的比率取决于不稳定的起因。内部转子摩擦力、环形径向轴承、涡轮叶缘阿尔弗德力、叶轮-扩散器相互作用、脉动扭矩、轴向-径向耦合等影响都引发过转子动态不稳定。
图 20-2 示出的是发生转子动态不稳定的涡轮泵加速度计输出的等值线图。在此 3 维图中,纵轴是功率谱密度,平面轴表示时间和频率。如果不发生不稳定,加速度响应只是如图右侧所示的同步频率,此外,也不会存在显著的噪声。然而,如果系统中存在转子动态不稳定,除了同步频率外,将会出现如图左侧所示的次同步频率。正如图 20-2 所示的那样,次同步频率和同步频率之间的比值约为 0.5。这是一种比较典型的和径向轴承相关的作用诱导的不稳定性,参见参考文献[von Pragenau,1982]。在径向轴承中,转子与定子之间是库艾特流动,由于速度剖面是线性的,库艾特流动系数 C=0.5。
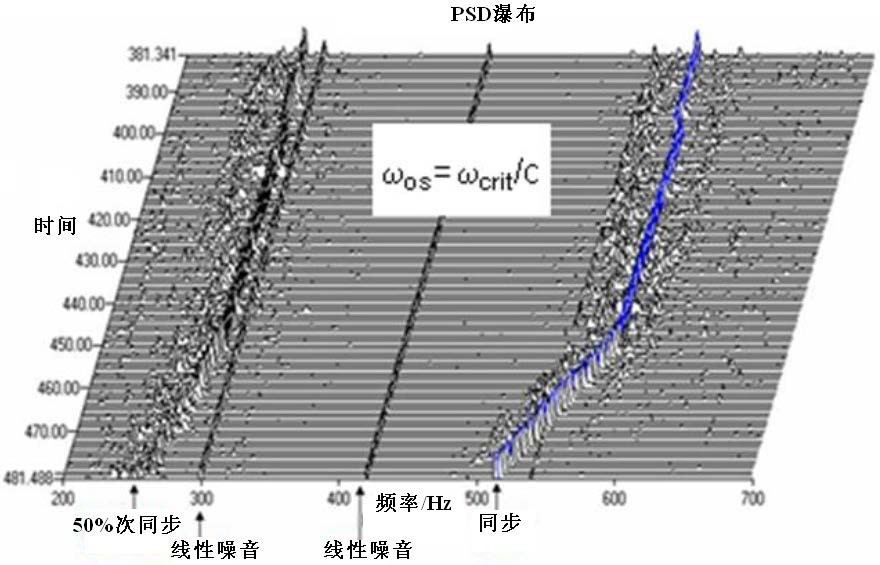
图 20-2 加速度功率谱密度的等值线分布图
SSME 研制过程中,首次转子动态不稳定事故发生于 1976 年。不稳定性发生在高压燃料泵上。在此案例中,级间密封形式由迷宫式变为台阶式,同时也加强了轴系刚度。
临界频率由 9500rpm 提高到 18000rpm。因而,起振速度大约为 36000rpm。
SSME 液氧泵首次出现转子动态不稳定是在 1982 年。氧泵的末端安装了阻尼密封轴承。液氧由预压泵叶片驱动,然后流过泵和轴承。由于末端安装阻尼密封轴承,不稳定现象被抑制了。在阻尼密封轴承工作区域,定子表面粗糙,库艾特流速度剖面也不再是线性的了。库艾特流系数减小,这样一来,起振速度超出了工作运转速度范围。尽管 George vorl Pragenau 在 1970 年代中期就构想了阻尼密封轴承,但直到 1982 年才得以应用。阻尼密封轴承是技术发展上的一次突破,它实现了液氧涡轮泵和燃料涡轮泵转子动态稳定运转。它把不稳定的起振速度移出了实际运转速度范围,且还有显著的余量。
1986 年,SSME 被尝试提升到 109%的功率量级。燃料泵速度接近或者略微超过 36000rpm(潜在的起振速度)。生产了一台无阻尼密封轴承的产品泵,当时的想法是,如果出现了不稳定现象,就再加设阻尼密封轴承。在初期的试验中,泵转速为 36860rmp,存在不稳定现象。之后,将级间台阶密封更换为阻尼密封轴承后,不稳定现象就消失了。
旋转运动导致高的静、动态载荷,这些载荷通过轴承磨损或者是组件之间的摩擦作用,对系统产生灾难性的影响。这是不可接受的,会导致部件破坏。通常,必须采取有效措施来消除转子机械上的旋转不稳定性。
20.1.2 SSME氧泵轴承碎裂
在航天飞机首飞之前,SSME 液氧泵端面轴承出现了碎裂现象。如图 20-3 示出的是洛克达因液氧涡轮泵。双轴承位于液氧泵端面。
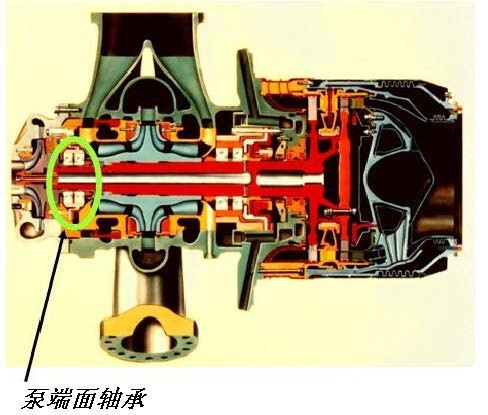
图 20-3 洛克达因的液氧涡轮泵
引起轴承碎裂的原因不为人知。实际上,也不知道它是发生在启动过程、稳定运行阶段,还是在关机过程。此外,研制试验过程中,并没有发生由于碎裂而导致发动机失效的情况。
没有人知道,碎裂是否是一种失效模式。于是,决定把碎裂的轴承安装入几个涡轮泵内,并进行 800s 的试验。所有的涡轮泵都设置了红线保护,当时想,如果出现了事故,红线保护将关闭发动机,而不至于发生严重的损失。其结果是,泵试验中发动机没有发生事故。
由于这些试验的结果,碎裂没有成为影响飞行的一个问题,第一次飞行成功了。但是,在每一次飞行之后,必须更换轴承。此外,涡轮叶片在每次飞行之后也需要更换。这些更换成本每台泵高达 300 万美元。目前在飞的涡轮泵已经使用氮化硅研制的轴承,该问题也不再是一个被关注的问题。
20.1.3 SSME氧化剂主阀低频噪声解决方案
在进行研制试验过程中,氧化剂主阀(MOV)附近噪声引发振动问题导致了两次主发动机失效。此外,也观察到,20%的发动机也存在此振动问题,但并未引起严重后果。最初,认为高振动源自 MOV。但这是让人很疑惑不解的,因为在 MOV 中并没有运动部件。图 20-4 左边是 MOV 横截面示意图,右边是垫片装配尺寸示意图。阀门中有一个波纹弹簧,在其尾段采用的是 Kel-F 密封。弹簧和密封的作用就是要确保 MOV 不泄漏。每一台的 MOV 都需要进行调整来确保所需要的密封性能。从上图的右侧视图中可以看出,在切向腔的附近区域形成了一个“间隙”,其水平位置的变化情况取决于密封调整情况。进入到 MOV 的流体在穿过 0.343 英寸间隙时产生了脱涡,由此产生了“边缘声”,然后与纵向管路声波模态和切向腔声波模态耦合。这种耦合在 RMS 压力振幅为 165 psi 和 7300 Hz 基频处,发生了啸叫。这些高压力振幅使阀内组件产生了振动,最终组件的摩擦导致了着火,严重损坏了硬件。高振幅压力振荡主要归因于 LOX 管路中的 800 psi 动态压力(例如,高能量密度)。
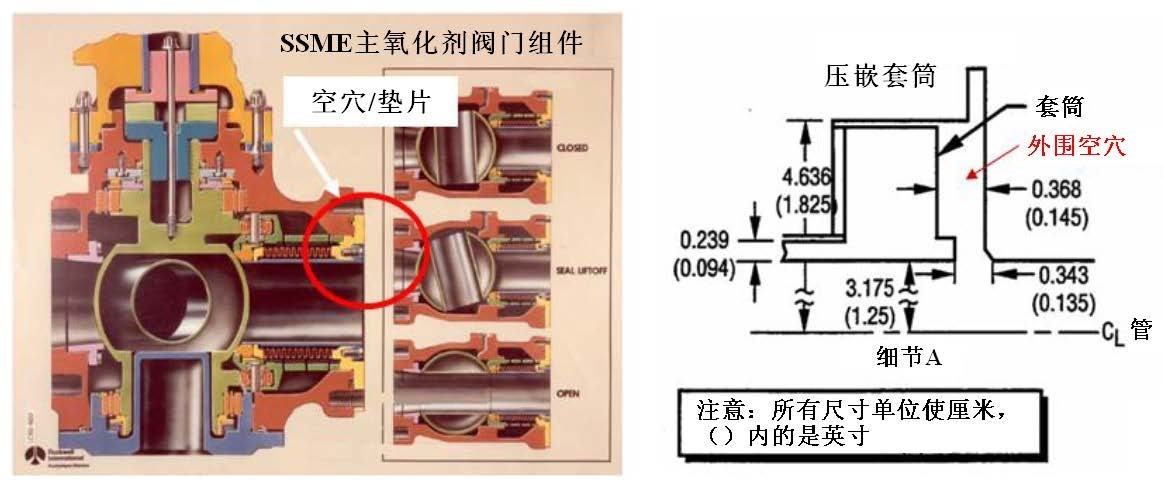
图 20-4 氧化剂主阀
图 20-5 中的数据源自一系列 SSME 试验。最上面是 MOV 振动响应功率谱密度函数随工作时间的变化情况,中部是推力随时间的变化,最下面是每次试验的振动功率谱密度(PSD)。这些试验每一次都是在相同的功率量级上开展,但正如所看到的那样,振动量级却在逐次不断增加。从图 20-5 下部可以看出,振动量级从 368g 发展到了 l230g。

图 20-5 主氧化剂阀门振动试验及响应图
图 20-6 所示的是 MOV 入口压力波动的典型功率谱密度(PSD)情况。可以看出,整个均方根量级(rms)是 l65psi。在 7300Hz 处,rms 值为 l27psi,在 14600Hz 处,rms 值为 78psi。这些高的声压量级实际上是脱涡、管路纵向声波模态和切向声腔谐振的结果。谐振中压力波动的振幅正比于动态压力,其值约为 800psi。
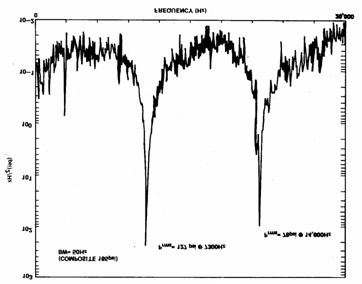
图 20-6 氧化剂主阀入口压力波动
在图 20-7 示出的是说明并证实谐振机理的坎贝耳图。在标明谐振过程的区域,示出
MOV 液氮试验中的频率结果、Rossiter 脱涡方程、纵向管路模态和边缘间隙切向腔模态。
所有这些频率的合成导致了引发 MOV 高振动量级的音调压力波动。
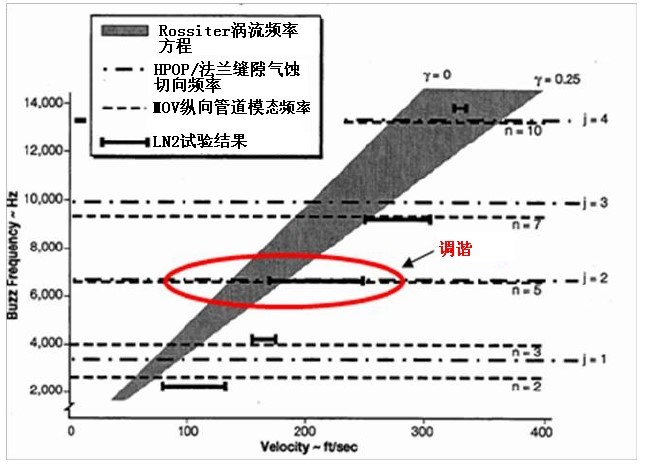
图 20-7 声学机理图
消除这些高声压波动的措施就是在边缘间隙腔中安放一个垫片“填充/关闭”切向腔缝隙,防止脱涡/边缘音的产生。这样,声源就被消除了。
图 20-8 给出的是有/无垫片条件下 MOV 振动响应情况。从中可以看出,加速度量级从 338g 变成了 33g。因此,使用垫片的机理被证实。
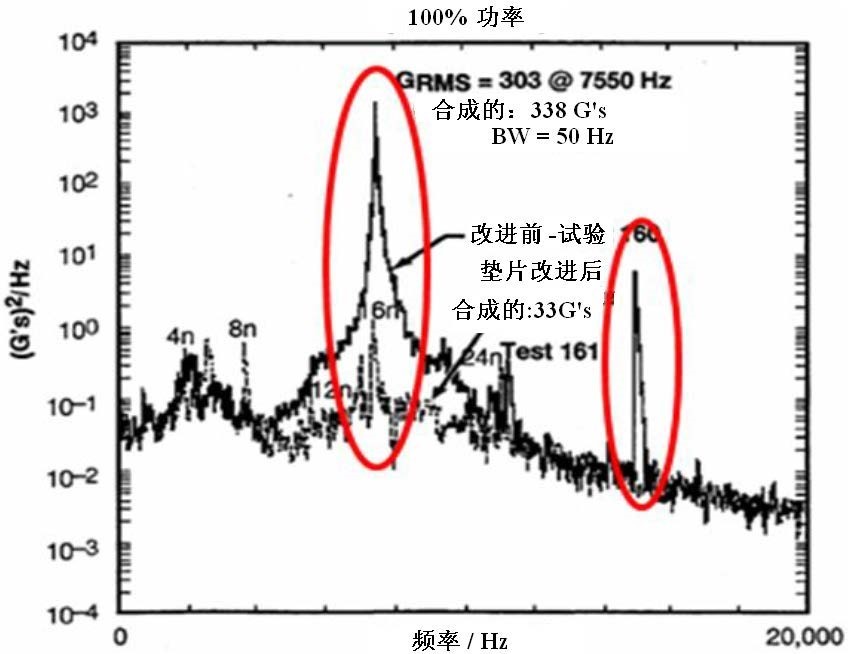
图 20-8 措施的效果
火箭推进系统能量密度高。如果我们对飞行火箭动压与发动机流动(譬如 MOV)动态压力之间做一个比较,就可以明白这一点。火箭飞行中的最大动压大约在 5 psi 到 6 psi 之间。这是非常重要的,因为所有的点载荷、分布载荷和非稳态载荷都与动压成比例。对于 MOV,其动态压力为 800 psi。同样,所有的稳态和非稳态载荷都是与此动态压力成比例。其结果就是:通常并不重要的事情现在变成重要的了。在此情况下,有两台 SSME 失效于听似“温和的哨声”,而其使 MOV 发生高达 1230g 量级振动。最终,
MOV 问题通过独立分析及部件试验得以解决。
20.2 从启示20得到的关键信息:
我们的历史告诉我们,关键领域需要开展独立并行分析、试验和设计工作;同样也需要分析人员和设计师的创造能力和创新能力。
启示 21:所有的分析和试验都有局限性
所有的分析和试验都是有局限性的,它们都是基于一系列的假设基础上。不要超出假设范围外推。 分析是有局限性的:边界条件和初始条件,物理参数,子模型,数值算法等; 分析工作应在试验之前开展;
试验也是有局限性的:相似准则参数,边界条件,不完善的试验模型,缺乏综合环境条件,设备,数据处理等; 各种基准分析和试验需要外推至飞行条件下; 确定对关键变量的敏感性;
分析和试验结果应与识别出的不确定性结合。
所有的分析和试验都是有局限性的,它们都建立在各种假设和模型上,外推不要超出经确认的试验和分析结果。
高性能计算机速度和容量的增加,使得当前理论分析水平进展非常显著。然而,由于数值方法,子模型,初始条件和边界条件的确定,物理参数等原因,其局限性仍然很大。与之相似,试验也是如此,例如:缺乏实现相似性的能力,不完善的试验模型,缺乏综合环境条件等等。尽管如此,设计者也必须通过采取分析和试验相结合的综合分析方法来获取最佳的平衡设计。
早期,由于缺乏对设计空间的定义,设计和试验都不太成熟。理论分析工作应始终在试验前进行,并在确定试验上起指导作用。在经历了试验之后,物理和设计空间就变得更加清晰。之后,理论分析模型也可以得到升级和更新。这将使得设计空间及后续试验方向更明确。在一些复杂的情况下,可能需要经过一系列的迭代过程来确定设计空间和收敛建模和试验设计,也就是确定模型。
在一些情况下,由于难以在准确的动态相似条件下来开展试验,实际试验的相似性也不是很准确;譬如,高雷诺数流动,化学反应流动等等。在这些情况下,必须发展出一种能够解释相似性的方法。针对于关键参数的敏感性分析对于深入了解这些效应很有帮助,而且也能给出如何在设计中解释这些效应。在某些情况下,最终可能还是要通过飞行试验来确定,譬如火箭发动机的羽流效应。
在分析和试验中,不确定度是必须确定的。这可以通过比较历史数据库、试验结果和专家意见来实现。
21.1 例子:
- 外挂贮箱氢气扩散器
- SSME 动态环境/计算流体力学
21.1.1 外挂贮箱氢气扩散器
在航天飞机主推进系统的第一次试验中,由于高周疲劳,氢气扩散器失效。图 21-1 是航天飞机主推进系统。氢气扩散器安装在氢箱顶部,呈圆柱状。它主要用于控制进入的高温自生增压气体的混合,使气垫温度、增压介质剩余量以及起动瞬态期间气体对推进剂液面的冲击作用最小。设计目的是让气垫气体如活塞一般推动液氢流出。
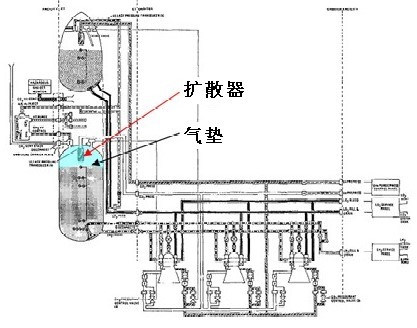
图 21-1 航天飞机主推进系统图
扩散器的设计是在土星/阿波罗 S-IVB 级火箭使用消能器的基础上进行的。当前所选择的扩散器型式经过应力分析及流量鉴定试验。试验结果表明,该扩散器尚有足够余量,完全能够满足主推进系统(MPS)试验需求。
然而,该扩散器对于流动产生的振动很敏感。在经历了 26 小时的氦吹除冲刷及 1.19 秒的热试车后,消能器柱形中间破损失效,有 6 块碎片和部分过滤网筛掉落到液氢箱底。图 21-2 显示的就是失效的扩散器。

图 21-2 气氢扩散器示意图
初始的分析和试验表明系统的裕度是足够的。在主推进系统失效后所做的一些附加分析和试验也没法确定失效的原因。但同时也注意到,在这些试验中,为了获取测量响应情况,试验台上布置了大量的应变测试设备及加速度测试设备。这些设备对于响应产生了阻尼作用,为此,除保留了 3 路应变计之外,其余全部取消。在后续试验中,响应显著增加,在流动试验中扩散器失效了。图 21-3(左侧)显示的是在氦流动试验中,均方根(rms)应力和质量流量之间的关系[Norquist,1979]。该图的右侧给出的是均方根(rms)应力同失效时循环次数的关系曲线。从中可以看出,均方根(rms)应力在铝合金 6061 的疲劳极限之上,就快要发生周期疲劳失效了。
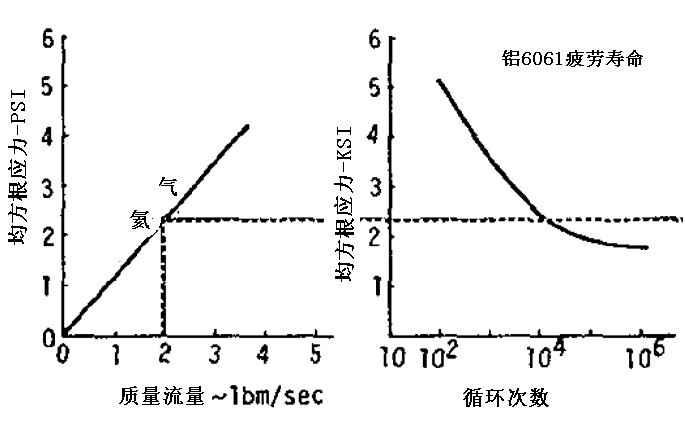
图 21-3 改善前铝 6061 均方根应力曲线图
之后,对扩散器进行了重新设计,原采用的 0.05 英寸壁厚铝材换成壁厚为 0.085 英寸的 21-6-9 钢材。此外,为了减少噪声量级,使用入口喷嘴替换了原平板状态。流动试验结果见图 21-4,其表明,重新设计的扩散器均方根(rms)应力低于疲劳极限。在后续的主推进系统(MPS)试验中,扩散器性能满足要求。
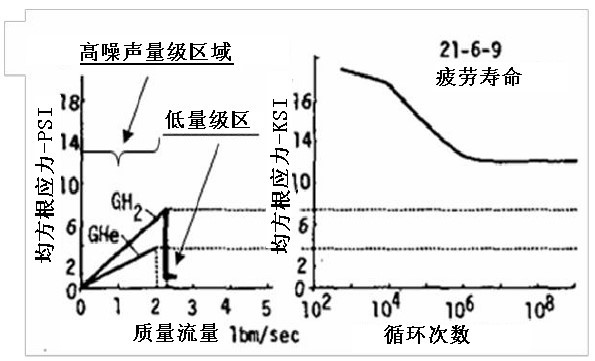
图 21-4 改善后钢 21-6-9 均方根应力曲线图
21.1.2 SSME动态环境/计算流体力学
在 SSME 研制中,发生了大量的疲劳问题;很多都是高静态、动态环境的作用结果,而这些环境都是由高推力室压力引起,加之,复杂弯曲流路和流路中的一些凸起和空腔使得这种环境更加严酷和恶化。失效的例子包括:LOX 喷嘴、氧主阀、流量计、分流管、高压燃料泵叶片、电容探测器等。
在这种极端环境下,预测能力在被限制至不存在。例如,在 H-1、F-1 和 J-2 发动机研制中,流动分析为一维或二维,推力室压力分别为 Pc=(H-1,625 psi:F-1,982 psi; J-2,763 psi)。此外,这些发动机都是一次性使用的。而 SSME,其推力室压力为 3100psi,
发动机是可以重复使用的。由静态、动态流动导致的载荷提高至少是燃烧室压力的倍数关系(举例,SSME 与 F-1 之比为 3)。
在 SSME 研制初期,流动分析大部分都是采用一维或者二维方式。然而,有一点是非常清楚的,就是必须提高对环境的认识。虽然 CFD 已经试用了多年,但是也还不足以成熟到支撑设计工作。但是,大幅提高的计算机容量及速度、先进的数值方法和湍流模型使将 CFD 用于设计成为了一种潜在可能。1987 年,CFD 开始被开发作为一种设计工具而应用到了设计过程中。为达此目的,需要完成以下几点:l)整合/提高推进承包商、科研机构、CFD 专家和政府流动分析专家的能力;2)按照设计的需要提高 CFD 方法/代码的技术水平;3)制定用于发动机设计的基准 CFD 方法/代码;4)将结果用于设计过程中。
由 CFD 分析人员和流体试验专家组合成的团队,集中精力进行了旨在提高涡轮、泵、燃烧装置效率的科研活动。形成了三个小组,其中每年分配给 CFD 研究 5~6 百万美元经费;对于基础试验研究,每年分配 2~3 百万美元经费。在 4 年时间里,涡轮、泵的效率提升到了可以减少火箭级数的程度。对于一个研制项目,节省一级的涡轮和泵,成本可以节省 7 千万美元。
图 21-5 是一个典型的 CFD 计算结果实例。这些活动支持稳态和非稳态、热流、热环境、弹道及性能分析。CFD 已经发展成为一种新的设计工具,可以提高新设计的准确性,减少新设计中的不确定性。
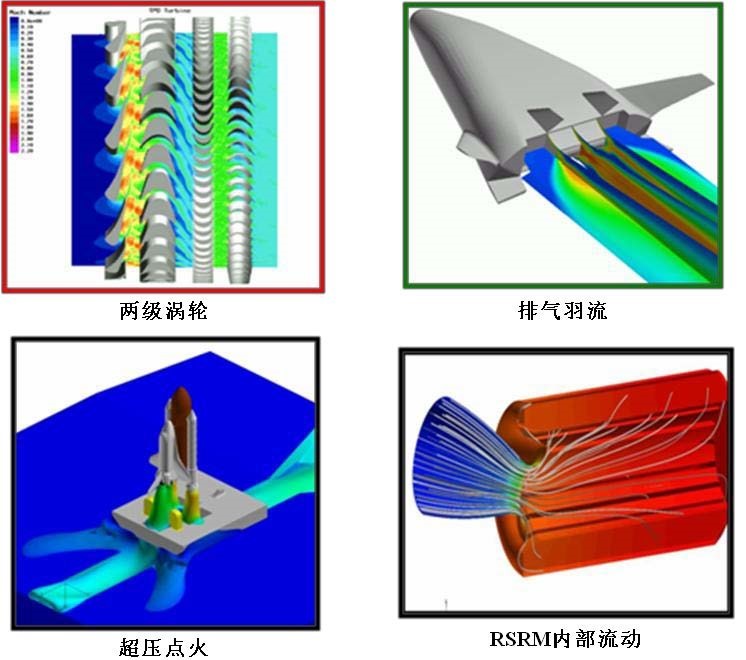
图 21-5 计算流体力学结果示例
在高性能产品的设计和研制过程中,分析和试验是非常重要且关键的工具,设计者必须清楚所作的相关假设及其局限性,包括不确定性的影响。如果没有深入透彻的理解,误导或者错误的结果,将带来使用成本以及硬件重新设计等非常昂贵的研制问题。核查敏感性,它会告诉你问题可能出现在哪里。
21.2 从启示21得到的关键信息:
要清楚分析或试验模型中所做假设及其局限性;不要囫囵吞枣!
启示 22:缩比是个关键问题
缩比是一个主要要考虑的事 制造流程的开发 缩比模型试验 数据分析
缩比使用非常普遍,以至于在有时即使尚未通过关键的考核就被应用; 为了防止可能带来误解的结果,要质疑和掌握缩比效应及其适用范围。
缩比是设计、试验、生产加工中的一个主要手段。缩比具有很多用途,包括:
- 将小试验件与全尺寸硬件相关联;
- 将试验环境关联并外推到飞行环境;
- 使用比全尺寸硬件小、廉价的试验件来研发制造(生产)过程:
- 从有别于飞行构型状态所获得的数据库来进行关联和外推。
因为缩比应用得非常普遍、频繁,在使用过程中很容易变得令人满意。然而,在设计过程的很多方面,必须细致、谨慎地使用缩比,尤其要懂得它的效应,不要超出它所适用的边界范畴。
22.1 例子:
(1)X-33 燃料贮箱
(2)土星 I 缩比模型的动态试验
22.1.1 X-33燃料贮箱
在启示 18 中的 X-33 燃料贮箱失效已经给出了一个缩比生产制造过程所引起的误导结果的实例。试验中发现,小尺寸试片的粘合强度是足够的,但对于全尺寸状态,粘合剂需要充分作用一段较长的时间,然后再送进热压罐加热。由于这更长的静置时间,使得全尺寸的试验件的粘合强度损失了近 50%。
22.1.2 土星I缩比模型动力学试验
土星 I 的缩比模型动力学试验提供了另外一个产生了非预期缩比效应的试验实例。计划用一个土星 I 的 1/10 缩比模型来开展先期的动力学试验。选择这么小的尺寸主要是考虑到易于试验且更经济。结果发现,要获得有效的结果,组件的公差和紧固件也需要成比例往下缩小。而这给试验硬件带来了一些比较极端的精度要求,这对于产品的制造无疑是一种挑战。只有通过将公差也进行缩比,才能够获取典型的结构模态和频率
[Grimes,1970]。
22.2 从启示22得到的关键信息:
缩比是设计、试验、制造验证中的重要内容。为了排除误导的结果,应批判性地质
疑和理解缩比效应,应用正确的、经过验证的缩比定律。
准则 VIII:必须鼓励勇于预想和揭示问题的行为
在本报告中引用的很多启示都是取自一些失效案例。我们所需要做的就是找到一些防止失败、不要让它们再发生的方法途径。下面介绍的就是关于如何避免问题发生的三方面经验:
23.必须倾听和掌握所有技术上和计划性的各种观点
24.更改无小事!
25.预料那些意想不到的情况
启示 23:批判性思考
少数人的意见是必不可少的,能帮助我们提高洞察力; 我们所获得的所有答案都是不完备的,都是基于我们所选择的假设条件; 为了得到一个更加全面的图像,需要不同的假设条件和思想方法; 我们的系统是非常复杂的,且高度相互作用的;因此为了确保成功,我们必须竭尽全力提高我们的洞察力。
应用批判性思考,避免将异常现象正常化: 思考一下真实系统是如何工作的,什么可能出错; 识别和质疑模型/试验假设和数据趋势上的偏离。
正如所强调的那样,航天系统异常复杂。正是因为这些复杂性,我们对于系统的理解总是有限和不完善的。因此,我们必须不断提高我们对系统的理解,预见可能出现的问题。为了增进我们的理解,启示 18 强调要仔细检查硬件及其参数情况。启示 20 倡导将独立分析、试验和设计作为另外一种加深理解的措施。本启示则致力于强调鼓励多方观点和意见的重要性,因为在探索真实复杂系统的过程中,需要有很多的观点和视角。 在许多情况下,“真理往往掌握在少数人手里”,因为这些观点往往来自于一些具有创造性、非传统思维过程的人,呈现的是一个独特的深入剖析。尽管有时在处理少数人的意见的时候可能是不方便或不愉快的,但我们必须鼓励这些意见。他们经常是批判性思想的最好实例,而这种批判性思想是获取成功所必备的。
23.1 例子-维纳尔·冯·布劳恩-土星I试验
考虑一下维纳尔·冯·布劳恩(Wemher Von Braun)对土星 I 动态试验问题的反应。该问题主要涉及来自于土星 I 动态试验数据,这些数据将用作控制系统设计。有一位颇具创新思想的工程师,他使用非常规的方法对数据进行了分析,从中分离出了悬挂系统对动态模态的影响。使用这些所谓修订过的模态将意味着先前设计的控制系统将是不稳定的。
深入研究该问题用了两周时间。进一步的研究揭示,这些新的模态是不真实的,它只是数值分析中的人为结果。在两周之后,向冯·布劳恩博士作了汇报,表明模态形状和原有分析一样好;因此系统是稳定的,发射是安全的。
在会议上,试验室主管抱怨我们浪费了 2 周时间来“追兔子”。冯·布劳恩博士对此的回答是,“如果他是对的,将会怎么样呢?我们总是有时间去寻找到正确答案。”
25 年之后,这位分析了土星 I 动态数据的具有创新思想的工程师发明了一种可简化工序流程的涡轮机械装置的阻尼密封件。难道冯·布劳恩博士这样评价和鼓励此类型的少数观点和创新思想有什么不对的吗?
23.2 从启示23得到的关键信息:
我们必须倾听所有技术上、管理上的意见。
倾听 倾听
倾听!
启示 24:更改无小事!
更改无小事。所有的更改都发生在系统内,因此会对整个系统产生影响。
“更改无小事”是一句非常熟悉的话,它意味着所有的更改都发生在系统内,因此会对整个系统产生影响,而且经常是以一种非预期的形式。该准则经常被称为“意想不到的后果定律”。
工程历史上痛苦的教训屡见不鲜。这里,我们引用 4 个这样的实例。
24.1 例子:
- 绳系卫星均匀绞线螺栓
- 土星 SI-C POGO
- 土星 S-II POGO
- 外贮箱的绝热发泡剂
24.1.1 绳系卫星均匀绞线螺栓
绳系卫星打算从航天飞机轨道器有效载荷舱部署,悬挂在 22 km 的绳系上,其目的是探索大量具有应用前景的前沿技术,使绳系推进系统成为一种可能。绳系从有效载荷舱的一个线轴上通过一个水平绞线机构来进行部署和回收,该水平绞线机构类似于某些钓鱼卷线(图 24-1)。
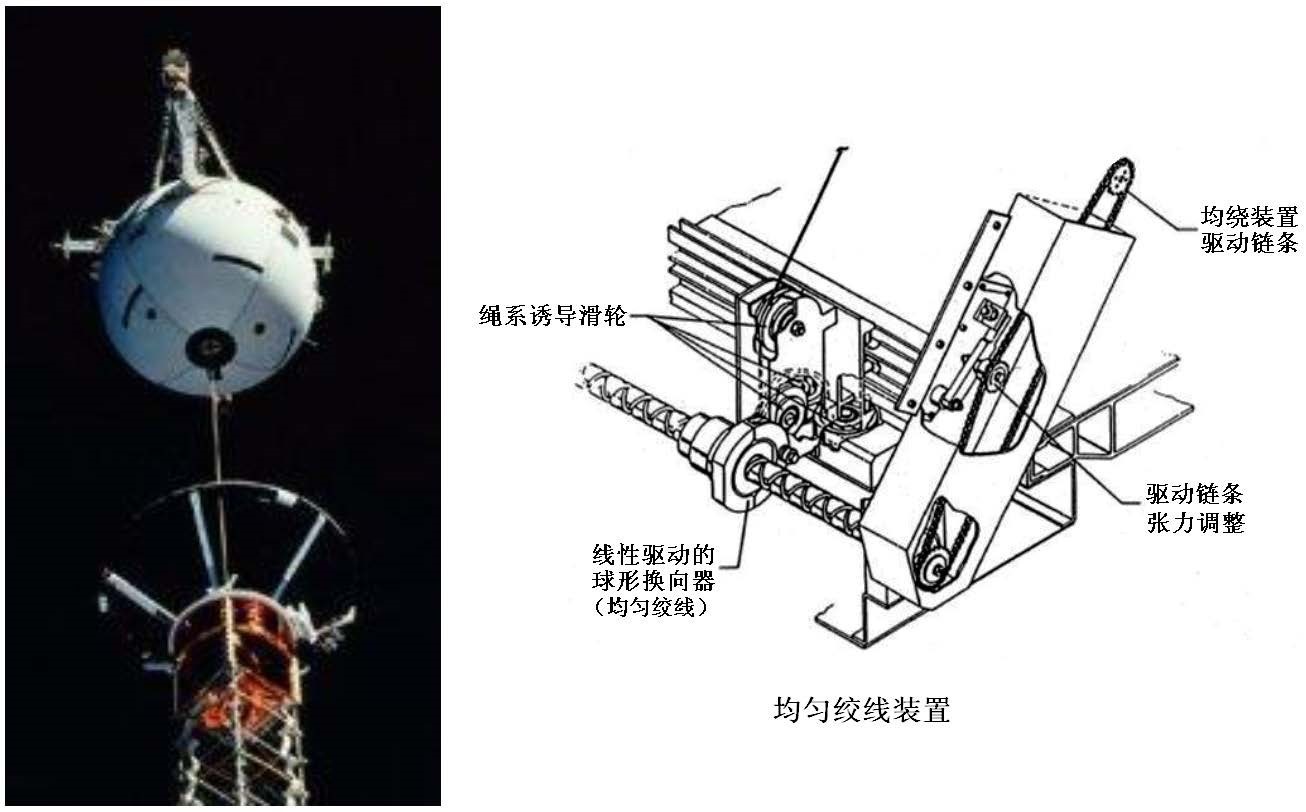
图 24-1 绳系卫星和均匀绞线机构图
随着第一次绳系任务已接近飞行准备阶段,此时的分析表明在均匀绞线机构上的一个螺栓没有足够的强度来应对所预测的应力。已经准备好的更改单要将该螺栓更改成使用更强材料。由于硬件已经装配好了,让人比较关注的是,如果拆下该螺栓,可能有些零件会发生一些移动,因此为了确保新螺栓的螺纹可以用,该螺栓被制作得更长更强。 由于此时绳系卷线系统已经在有效载荷总装车间,此时开展变化后的绳系部署试验将会导致计划冲突。因此,最终在此次“小”更改之后,没有开展系统验证试验。
轨道上,绳系卫星开始进行展开,一开始并没有问题,但是当其达到 256m 的时候,它停住了而且不再前进。加长后的螺栓卡滞了均匀绞线机构。通过此次短期任务部署,只达到个别任务目标,但主要的目标却没有实现[Branscome,1992]。
第二次绳系卫星任务达到 19.7km,没有达到 20.7km 的原定目标,此后绳系断了,卫星也丢了。事后评估将失效归结于绳系执行部件到部署器之间的一段弧,它割断了绳系。该弧可能初始穿过绳系绝热层的针孔。该失效似乎是不可预期的,但应该属于通过试验能够发现的未知问题这一类别[Szalai,1996]。
虽然后续也开展了一些更小的绳系试验,但是这两次大型的绳系卫星系统任务的失败本质上已经导致该项非常有前景的技术被搁置,这显然是一个重大的损失。而这一重大损失,开始于我们认为很小以至于都未要求开展验证试验的一个更改。
无论进行任何更改,都应该开展系统验证。没有更改是可以被假定认为是“小”的。
24.1.2 土星SI-C POGO
Pogo 振动是箭体结构纵向振动与主推进系统及液体发动机以闭环方式耦合作用的结果,而这种耦合作用加大了振动,且产生不稳定现象。之所以命名为 POGO,主要是取自小孩玩的弹簧单腿高跷(POGO stick)。图 24-2 表示的是弹簧单腿高跷(左边)和运载火箭结构和主推进系统耦合产生的闭环不稳定性的类比情况。
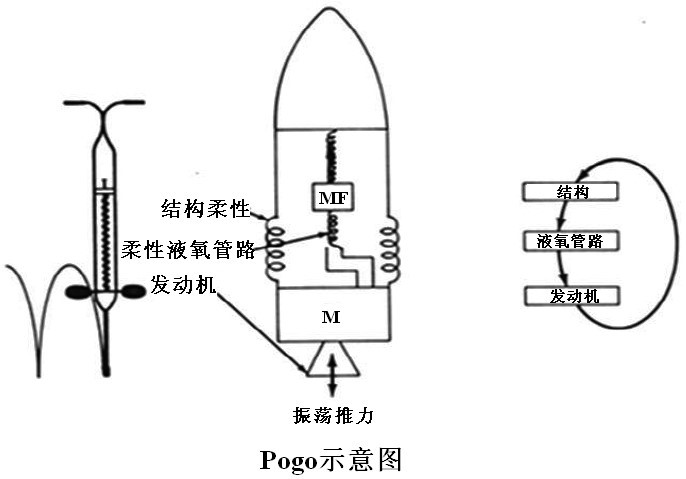
图 24-2 POGO 振动机理图
土星 V 火箭有两次 POGO 振动现象实例。第一次发生在土星 V 第二次飞行 AS-502 的一级飞行段,第二次发生在著名的阿波罗 13 任务中的二级飞行段。土星 V 火箭第一次任务 AS-501 没有产生 POGO 振动的迹象。土星 V 火箭的 AS-502 任务中在一级点火几近结束的时候,发生了显著的 POGO 现象。在整个早期的工程飞行中,已经有迹象表明在二级点火段有 POGO,但当时相信其是可以应对和可控的;然而,在阿波罗 l3 飞行
期间,在二级点火段的前120s发生了几乎导致灾难的POGO振动[Ryan,等,1969;Larsen,2008]。
AS-501 与 AS-502 火箭之间的差异很小。为了更好地模拟它们的质量和动态特性, Apollo 飞船组件做了一些小的变化。变化之处主要是从服务舱和着陆模块除去了 2000 磅质量,其中 200 磅增加给了发射逃逸系统(LEM),600 磅增加给了指令舱(CM)。质量变化情况是从起飞质量 6,000,000 磅中变化了总计 900 磅。这些箭体前端的改变将火箭一阶纵向振动模态的模态增益提高 30%,频率变化约 5%,由此引起了与液氧管路模态振动的耦合。该变化导致了箭体系统调整,并向不稳定发展。图 24-3 显示的是接近 SI-C 级点火末期芯级关机时模态放大系数的变化,频率变化和两种模态的耦合情况。
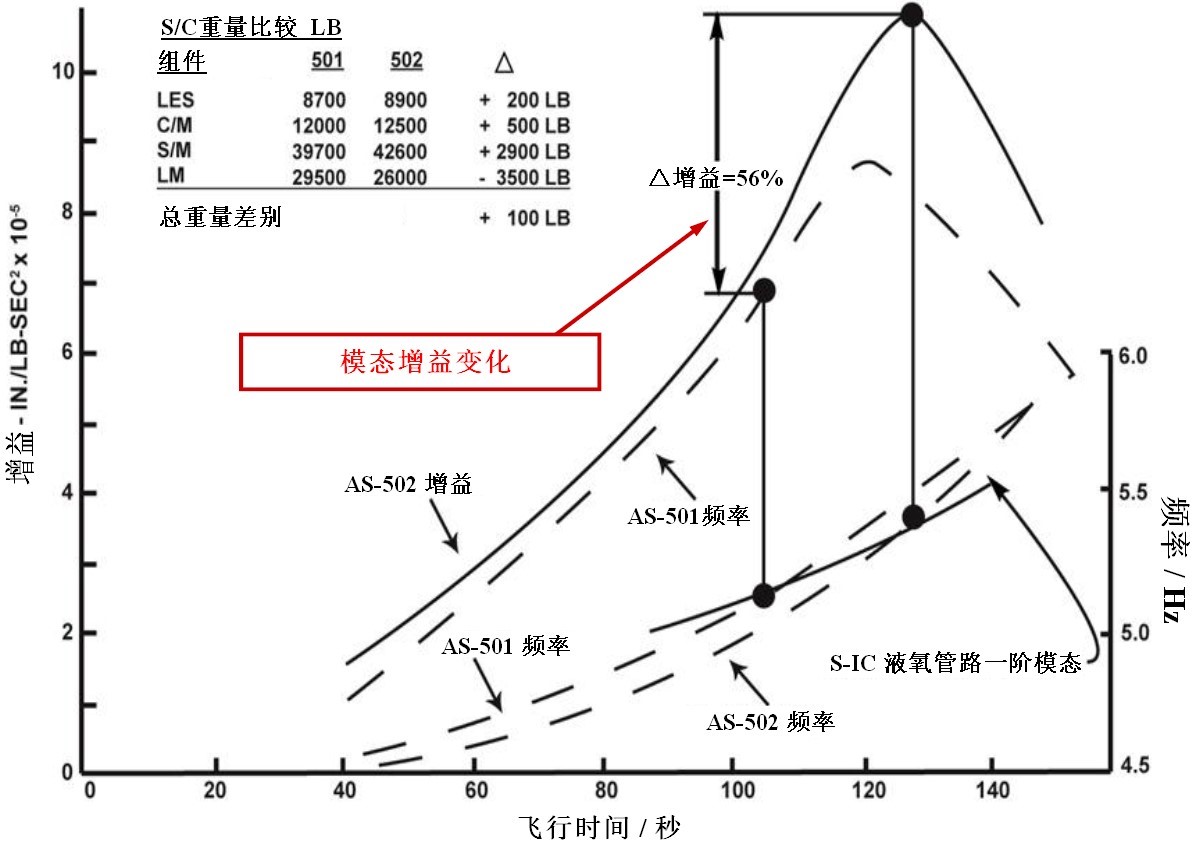
图 24-3 SI-C 纵向动力学特性对比图
解决的措施很简单,也很容易实施,主要是在液氧泵前阀附近安装一个 POGO 蓄压器。蓄压器对液氧输送管路的一阶纵向模态进行调节,在此后的飞行中,SI-C 就再也没有产生任何的 POGO 现象。令人震惊的是,在箭体前端如此一个小质量的变化,竟能让起飞重量达 6 百万磅的土星 V 火箭发生如此巨大的动力学特性变化[Ryan,等,January 20-23,l969]。
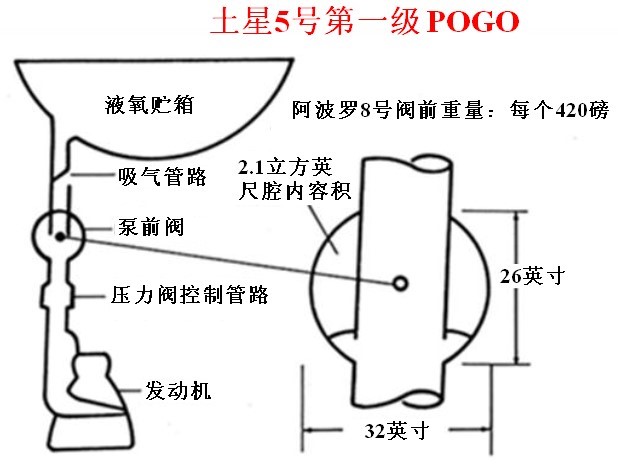
图 24-4 S-IC POGO 缓冲器
24.1.3 土星S-II POGO
基本上,土星二级在每一次的飞行中都会显示出一些小的耦合振荡,这实际就是 POGO 发生的迹象。这些现象大多数是在纵向 l2Hz 模态附近呈现出横向加速度的激增和衰减,该现象发生在二级的整个工作过程中。除了工作的后 60s 外,其余时间内振荡的振幅都比较小。关于 POGO 有一个专门的工作组,其成员来自于对 POGO 有所研究的所有 NASA 中心、院校以及火箭公司的工程师。可以断定的是,因为在二级工作段的后 60s 振幅非常大,因此关闭二级的中心发动机,而其余四台发动机的工作时间有所增加,以至于在性能上没有损失。图 24-5 是几次二级飞行数据的统计情况。

图 24-5 S-II 级点火后 POGO 产生过程图
耦合振动主要归结于中心发动机,这是因为它和机架之间是强耦合关系,而这又会影响到纵向箭体模态。除了原先计划中的关掉中心发动机外,在中心发动机的常平座增设了一个“g”切断系统,以确保防止箭体失稳。很明显,工程界并没有完全理解整个系统的敏感性和特性,因为在阿波罗 13 进入到 S-II 级工作 120s 时,发生了巨大的 POGO 振动,由于发动机泵超压,中心发动机关机。实际上,机架/发动机常平座处的振动达到了 34 g,可能使机架屈服了。这种振动见图 24-5。解决方法就是在液氧输送管路的末端设置一个 POGO 蓄压器,调节系统频率,由此解决了该问题[Ryan,December 1970]。
24.1.4 外部贮箱的绝热发泡剂
航天飞机外贮箱起外绝热作用的是外层蒙皮,其成型过程是将贮箱固定在夹具上,旋转喷涂绝热层。过去所使用的发泡剂不能满足当前环保的需求,为此就不得不去改变,寻找一种对环境友好发泡剂。诸如这样的变化,尤其是可能影响到如此大面积的变化必须重新进行验证和确认。标准的做法就是在环境条件范围内的各种边界条件下对这些系统进行验证。在此,环境变量是温度、压力、流场条件。当试验结束时,没有发现绝热层反应有什么差别,因此系统就参加了飞行。在飞行中,安装了一台照相机来观察飞行中会发生些什么,在经历了高温和外界低气压环境后,箱间段的绝热层发生了大面积的发泡爆裂。过去的绝热层未出现过这种情况。对此问题,一个专项小组对其开展了广泛的研究工作,在此过程中,有人认为也许试验应该是在名义条件下来开展而非选择环境条件组合范围内的边界条件。当这样做了以后,如同其在飞行中的表现一样,绝热层发生了粒状爆裂。由此发现,当在组合环境范围下的各边界条件下开展试验时,极端环境条件使得发泡剂中滞留的气体排了出去,就不会发生绝热层粒状爆裂;但是当在名义条件下来进行试验时,这些滞留在绝热层发泡剂中的气体溢出的唯一途径就是将绝热层吹成许多的小碎片。传递的信息包括两个层面:1)没有一个更改是小的;2)在所有环境组合条件下的鉴定试验是必须要进行的。解决措施就是在发泡剂喷涂之后在绝热层上打一些小孔,让其具备排气能力。由于采取了该项措施,箱间段的绝热层几乎就没有再发生过粒状爆裂。图 24-6 显示的就是一张飞行照片,照片中,所示区域的一半是在绝热层上打了小孔的,没有发生粒状爆裂;而另外一半未采取打孔措施,就确实显示出了粒状爆裂现象。
图 24-6 外贮箱中的绝热层有无粒状爆裂修复措施对比图
24.2 从启示 24 得到的关键信息:不要做没必要的更改。
–不要画蛇添足 –如果必须更改,一定要谨慎 –要了解系统的相互作用在飞行之前,要对变更的系统进行验证
启示 25:预期那些意想不到的情况
预期那些意想不到的情况——事物从来就不会完全如同它们看起来的那样。
模糊性在航天系统中是一直存在的。由于系统的巨大复杂性,许多事情基本上都是不可预测的,因此会发生许多意外。意外的事件形式多样,从人类到自然,再到我们所处理系统的物理本质。航天系统设计和使用的本质意味着,我们必须持之以恒地关注这些意外事件的迹象和特征。
25.1 例子–外贮箱拱顶上的啄木鸟
这里只用一个事例来阐述:STS-70 发射时,航天飞机竖立在发射工位,外贮箱头部的绝热层被啄木鸟打了洞。航天飞机不得不返回飞行器装配大楼修补这些洞,同时采取一些措施防止啄木鸟再接近,即在发射平台附近放置“鹰眼”气球稻草人和捕鸟器。
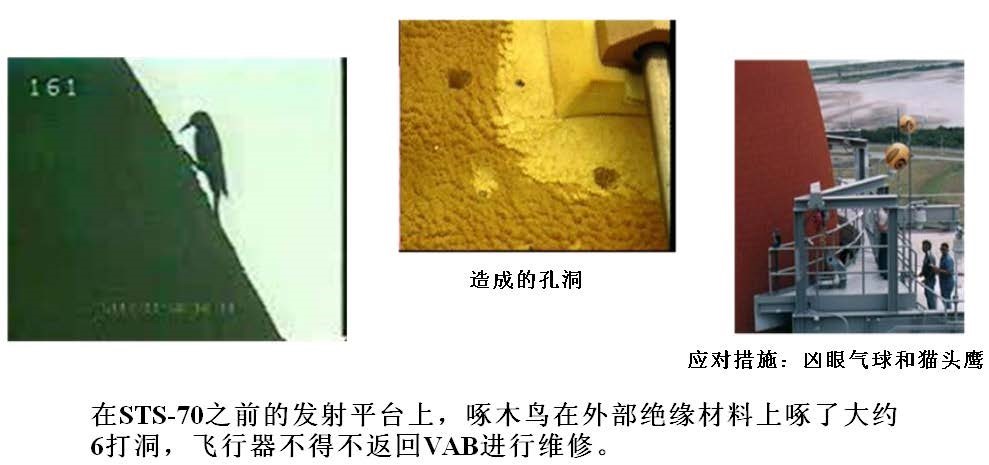
图 25-1 外挂贮箱拱顶上的啄木鸟
预期那些意想不到的情况!
25.2 从启示 25 得到的关键信息:
航天系统的设计和使用需要持之以恒地处理模糊性和意料之外的事情。这就要求始
终如一地重视寻找模糊和意外事情。
准则 IX:领导是基础
在本报告中,我们是以人的重要性为主这一原则开篇的。现在我们再回到这一话题,来谈一谈“领导力是基础”准则的含义。在任何的工程组织中,通往成功的两项关键工作是管理和领导。两者都是必要且重要的;然而,领导看上去是组织的起航风帆。没有领导,就没有清楚的路径和方向,任何组织最终都会走向失败。关于领导品质本身有很多方面,但这里仅讨论两个:表里如一、高瞻远瞩。
26.表里如一
27.高瞻远瞩
启示 26:表里如一
唱你自己的“歌”
表里如一是你的所作所为与你的内在相匹配
“你的天职”
决策的全局性对于领导而言很重要,它本身也含有诸多方面或者维度。其中很关键的一个就是在所涉及问题里,你的言和行的一致性。非常重要的一点就是你正在做的是按你的本性做的吗?是按你的方式做的吗?当你做到来自于你内心的呼唤状态时,你的外在和内在就联结在一起,达到了内外兼修。歌曲“我走我的路”传递的就是这儿所要表达的一些意思。当你的内在就是你的外在时,领导被组织信任就不再是问题。对于这一准则,有很多的实例。George McDonough 过去曾经谈到工程报告的写作问题,“只要它们在技术上是正确的,并表达了相应的信息,不要在意形式上的东西”。
26.1 实例–“你必须用自己的方法去做,别按照我的方法。”
当 Robert Ryan 作为教练执教篮球的第 2 年,球队有个负责人,他以前是一个成功的教练。这个负责人告诉他,“教练,我将参加你的活动,帮助你训练球队”。经过一个星期体育馆内的尝试之后,他邀请 Robert 到他的办公室,说:“教练,我在体育馆内对工作没有什么帮助。你有不同的训练风格,这些孩子们不能学习两种风格。他们只需要一个领导和一种风格。我将呆在办公室,我们可以讨论,届时我可以将我所知道的东西传递给你。我会试着去适应对你的系统的认识。你必须按照你自己的方式去执教,而不是按我的。”他的这种方式有效果吗?是的,Robert 在和他合作的第二年,球队赢取了阿拉巴马第 8 行政区的“A”级和州篮球锦标赛。之后一年,球队赢得了阿拉巴马第 8 行政区的“A”级和第 2 个地方州篮球赛冠军。正直诚恳还有许多其它方面,也都很重要。
如果想要领导成功,那么就应当做好关于正直诚恳的所有方面。
26.2 从启示 26 得到的关键信息:
缺失表里如一,你的一切言行都毫无意义
启示 27:高瞻远瞩
你必须着眼超越你自己,超出现况,它是“存在”和“拥有”之间的对抗。
组织中的个体都倾向于关注自己的兴趣及工作领域,而忽略对其它方面的考虑。组织中我们所做的任何事情都是一个完整的系统,我们每个人所做的工作都会对全系统产生影响。正是因为有这些影响,目前必要的是,我们必须重点关注自己之外的方方面面,不要在我们的工作和自己周围筑起孤岛。Bob Ryan 在 Vanderbilt-Peabody 大学从一位教授那儿懂得了一个准则,描述如下:“每个人都有个选择,即在人的一生中是重视拥有,还是重视存在。拥有的核心在本质上是社会层面的,它强调的是我们能得到什么,不论是认同、金钱,或是地位。存在的核心本质上属于精神层面,重点关注的是自己能成为什么。这个准则论及的是,你是什么和你怎样才能给组织、个人和社会做出有意义的贡献”。这就不仅要求我们要用一种卓绝的方式来执行我们的任务,而且要求我们要关注全局。正如 Stephen Covey 在他的著作《第 8 种习惯》中说到,“找到你自己的声音,帮助他人找到他们的声音”。
27.1 实例–筑起壁垒
有 80%的问题的发生是由于系统崩溃,而不是个别学科。然而,我们总是全神贯注于我们的学科工作,却未能看到全局。更为糟糕的是,我们还经常在我们的四周地盘建立起防护的壁垒。我们必须关注整个系统,这样我们才能看清相互之间的作用关系。
27.2 从启示 27 得到的关键信息:
“所有的事情都是按系统运行的,没有独立运行的事物。在这里,所有的组成部分之间都是一个相互作用的整体,而且很多情况下都是以一种非预期和不可预测的方式进行。”——Jim, Bob, Luke
“系统工程是一个工程师”——Max Faget
总 结
至此,我们完成了“工程中的经验教训”的学习。这些源自作者实践经验的启示经提炼而成为了一些可以在我们所有技术领域内应用的准则。这些准则和启示只有在应用时才是最重要的。我们所面对的关键问题是将这些准则和启示应用到工程组织及其产品中。
MSFC 的许多工程主任问过这样一个相关的问题:“在工程中,我们怎样才能做到最优秀?”。对于这一更宽泛的问题,笔者会以《卓越工程》短期教程形式来的回答,该教程材料将在未来的 NASA CR 中以《卓越工程》文档发布。
回顾一下,我们在开始组织这篇报告时,是基于我们在航天飞行系统研制中的实践经验中的 27 个启示之上,并由此提炼出了 9 个通用性准则。这些准则和启示再在这里重复如下:
经验教训准则
I.系统的成功取决于人们的创造力、判断力和决策能力
- 人是工程成功的主要资源
- 人的技能是获取成功产品的必备条件
II.航天系统是具有挑战性的高性能系统
- 高性能需求导致高能量密度和高敏感性
III.任何事物都是一个系统
- 系统工程和技术集成是项目成功的关键
- 风险管理
- 所有的设计过程都充满矛盾,平衡无处不在
IV.系统遵循着物理规律
- 问题的物理本质为最高主宰
- 工程是一个逻辑思维
- 数学是通用的!
- 运载火箭设计的基础为处理平衡效率问题
V.健壮设计基于我们对系统的敏感性、不确定性和裕度的理解
- 健壮性
- 理解敏感性和不确定性是必须的
- 项目裕度必须足够大
VI.项目的成功取决于生命周期的考虑
- 设计空间受制于产品在生命周期内的定位
- 方案选择和设计流程
- 需求驱动设计
- 针对属性和成本的设计
VII.试验和验证在研发中至关重要
- 答案就在硬件及其数据里
- 现在试验或将来试验
- 独立分析、试验和设计是成功的关键
- 所有的分析和试验都有局限性
- 缩比是个关键问题
VIII.必须鼓励勇于预想和揭示问题的行为
- 批判性思考
- 更改无小事!
- 预期那些意想不到的情况
IX.领导是基础
- 表里如一
- 高瞻远瞩