印度下一代反辐射导弹(DRDO RUDRAM-1 )
介绍
使敌人的雷达和SAM系统无效是攻击部队执行的主要任务之一。在没有反辐射导弹的情况下进行 SEAD/DEAD是极其危险和昂贵的,即使使用轻型气囊。印度空军为了增强其打击能力,正在率先研制许多空射炸弹和导弹。在类似路线上,空军已经采取了多个机构,主要是DDR,ARDE,DLRL,HEMRL,RCI,TBRL,NTAF开发NGARM下一代反辐射导弹,现在命名为鲁德拉姆-1(RUDRAM-1)。地对空导弹可能不是100%完美,但可以保证对空袭有强大的威慑力。中国人在这个特定领域取得了巨大的进步。SAM 的部署在陆地上设置了禁飞区。除非获得空中优势,否则地面攻击或防御是毫无用处的。

前印度空军战斗机飞行员、备受尊敬的电子战专家达尔吉特·辛格(Daljit Singh)对印度空军收购NGARM表示广泛欢迎,不过他警告MONCH,”要真正相关和有效,ARM必须具备多模式作战能力。它还必须升级,以匹配新兴的雷达技术。
他强调,导弹的探索者必须能够探测和锁定当代雷达威胁,采用无数低概率的欺骗/拦截和电子反制战术和技术隐藏在电子中。阿姆·辛格还敦促印度空军投资护送干扰器进行打击,他认为空军目前在这方面存在不足。
他强调,导弹的探索者必须能够探测和锁定当代雷达威胁,采用无数低概率的欺骗/拦截和电子反制战术和技术隐藏在电子中。阿姆·辛格还敦促印度空军投资护送干扰器进行打击,他认为空军目前在这方面存在不足。


设计
DRDO NGARM / RUDRAM-1 是印度空军制定的严格要求的效果。它可以从500米到15公里的高度发射,速度从马赫0.6到马赫2.0不等。其总射程为200公里。导弹重600公斤,长约5.5米。下降飞行试验 (DFT) 于 2016 年 12 月完成,苏-30 MKI 以 0.8 马赫的速度从 6.5 公里高空释放导弹。导弹的前部包含寻找敌方RF波所需的被动定位头,其背后有导航系统。固定十字形机翼连接到发动机外壳上。在机尾部分,我们有双脉冲固体火箭发动机。著名记者Saurav Jha说,设计类似于LRSAM的双脉冲推进,LRSAM和NGARM的火箭发动机都由同一家名为Primier炸药有限公司的公司制造。最后有一个喷管,周围是看起来像控制和稳定执行器的喷管。他们几乎为零信息和图片的控制机制,移动导弹鳍机动。基本上只是一个放大的 Astra mk1 与喷管。
被动导引头(PHH) 跟踪各种频率的辐射源。它还配备了一个MMW探矿器,以30 Ghz或以上的频率传输,以海奇定位和击中移动的发射器。它不仅可以在发射前锁定目标,还可以在发射后锁定目标。
被动霍明头、MMW 寻呼器和 INS-GPS 制导系统的组合使 RUDRAM-1 不仅能够接合移动 SAM 系统等可移动防空目标,还可以与具有关闭功能的其他发射目标进行交互。这意味着,即使敌人在导弹发射后关闭雷达/发射器,它仍然会发现并击中目标。
MMW 巡的是特别使用的, 如果目标是一个移动的山姆系统, 有关闭它的排放, 并试图溜达。在这种情况下,多模式搜索者将在 GPS/惯性控制下飞向搜索足迹,其中 MMW 搜索者将搜索目标,从而允许精确定位攻击。现有的 MMW 探索者技术能够识别特定的目标类型,按形状和精细的多普勒调制。多传感器 NGARM 的操作部署将意味着移动 SAM 系统的结束,因为它有效地消除了射击和滑板车以及空中战术。
导航系统。
大多数人认为反辐射导弹的导航系统使用射频源有点棘手。在已知目标位置的启动后锁定操作模式之一中,NGARM 将在内嵌区域飞行,并在发射后打开,这样操作需要其他传感器的指导。在密集的EW环境中,目标雷达的侧向和其他来源的波限制了NGARM跟踪生成轨道的能力,GPS-INS制导有助于实施连续的位置修正,直到导弹足够接近,能够清楚地看到目标波。它们在实施卫星导航系统与惯性导航系统相结合方面具有许多技术性。惯性导航系统为飞行过程中的路线校正提供输入和输出。DRDO 尚未透露在 NGARM 中使用的 GPS-INS 指南类型的确切照片和设计细节。
在 ARM 中需要惯性导航还有另外一个原因。ARM 主要在主露和侧露上进行定位,主要是水平侧向和后叶排放目标,在浅潜轨迹中攻击目标。因此,具有极低侧叶天线的现代雷达将向接近的 ARM 显示一个”闪烁”目标,当天线朝入射导弹方向辐射时,ARM 必须从活动发射间隔中估计目标的实际位置。在NGARM飞行的最后阶段,目标上的一个缓慢旋转的天线可能正从导弹上望开,几乎从源头发射什么。NGARM 将根据以前对雷达位置的测量,遵循一个不动的引导轨迹。因此,导弹不会直接击碎目标,而是在距离目标几米内通过,利用其接近引信引爆弹头。这就是为什么除了卫星导航系统,其精度因地理位置而异外,我们还需要反辐射导弹的惯性导航。

NGARM 的弹射器发射类型发射器。
弹头
NGARM有一个60公斤的预先碎片弹头。在典型的 DRDO 设计的 PF 弹头中,有钨碎片,这些碎片以这样的方式包围一个充满炸药的柱子,并缠绕成作为外壳的灯丝的伤口。在FRP管内填充称为 DENTEX 的新炸药的爆炸柱。它被引爆以分散周围高密度钨碎片,造成严重破坏。这些弹头即使在很远的地方也致命。高密度钨合金碎片采用粉末冶金技术制造。DENTEX 是一种新的爆炸性 DRDO,它混合了 RDX 和 TNT 和其他物质。多年来,DRDO设计了许多此类弹头,并开发了测试方法和数学模型来预测PF弹头的性能。
通过查看各种博客上提供的小册子照片,弹头设计似乎与 Akash SAM 的 65 kg PF 弹头非常相似。
通过查看各种博客上提供的小册子照片,弹头设计似乎与 Akash SAM 的 65 kg PF 弹头非常相似。

激光接近引信
NGARM 的引信非常独特,它采用激光测距仪来测定它与目标的距离。看起来Rudram-1设计成垂直俯冲,通过目标发射器上的光束,这种专门的融合安排旨在精确测量导弹的高度,并在导弹经过雷达天线附近时触发弹头引信。这确保了弹头在发射时尽可能接近目标。关于DRDO激光接近炸药设计的确切信息是没有的,我尽了最大的努力去找到它。由于在计算射频频率源的确切位置和由于惯性而从该源漂移导弹时有一定的不可预测性,导弹从未直接撞击目标。它只尽可能接近。由于这种接近引信被用来引爆弹头,一旦他们足够接近造成损伤。

第二次世界大战光学接近引信的例子
通常,此类设备由光学测距装置组成,激光可产生照亮表面的光脉冲。镜面内的排列使单个镜头能够发射并接收这些脉冲的反射。光纤束用于延迟光学参考脉冲,以对应与目标的预定距离相对应。光学测距设备包括根据目标反射的光脉冲提供第一个信号的电路:第二个信号取决于光纤延迟光纤束的光脉冲:以及第一个和第二个信号相互重合时的输出信号。输出信号启动电路,使雷管成为可能。另一个电路可以澄清接收的激光脉冲与目标表面反射的任何其他光之间的差异。该系统知道它正在攻击的雷达类型,因此也知道天线的高度在地面之上。然后,这些信息用于选择最适合弹头发射的高度。

苏 – 30 Mki 武装与阿斯特拉 Mk1, Ngarm 和婆罗门阿尔克, 一个典型的DEAD配置。
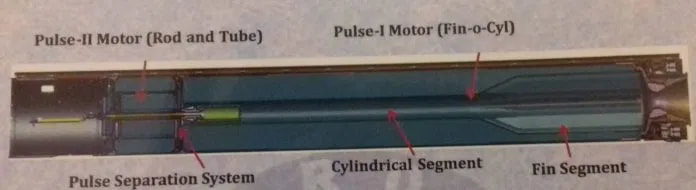
推进系统
NGARM使用双脉冲固体火箭发动机。双脉冲固体火箭发动机设计由两个燃烧室组成,由舱壁隔开,指定为脉冲分离装置 (PSD) 和喷嘴。脉冲分离装置可保护第二脉冲室中的推进剂装药在第一次脉冲操作中免受高温和压力冲击。在第二个脉冲启动时,PSD 可靠地打开气体流,来自第二脉冲室的燃烧气体通过空的第一脉冲室和喷嘴。此设计允许在第一个脉冲烧毁后的任何时间启动第二脉冲。使用一个中央喷嘴进行脉冲和避免横向喷嘴有助于导弹在第二脉冲阶段的机动中表现出出色的空气动力学稳定性。双脉冲火箭发动机的数量在导弹飞行中设计、制造和成功测试,并证明了这项技术的实用性。
第一个脉冲室充满了翼柱型形状的含铝复合推进剂。它的燃速适中。在第二个脉冲室中,浇注星形低铝复合推进剂。它的燃速率很高。两燃烧室都装在一起。在两室之间,PSD 被封住了。喷管安装在第一个脉冲室的后部。双脉冲火箭发动机的典型推力时间曲线如下图所示。
图片由Saurav Jha 在推特上发布。
NGARM 的双脉冲火箭发动机在设计上与 LRSAM 相似,由同一家公司制造。
被动寻的制导头
恩加姆有一个被动的寻的制导头。这意味着此探索者不会发射任何无线电频率辐射,它只接收它们。接收到的辐射的方向和距离被准确检测,头部朝或朝该方向移动,试图击中该射频发射源。PHH 是一个宽频段系统,前端由中等单片集成电路制成,用于识别射频波。

NGARM 上的被动寻的制导头由位于海得拉巴的 DLRL 和阿斯特拉微波公司开发。被动定位头执行检测、方向查找和生成已检测到的每个目标的轨道的复杂功能。它被设计成识别1至10和6至18Ghz的军用雷达。该系统有一个典型的空腔背螺旋天线的设计,通常发现在其他国家反辐射导弹的其他被动定位头。它们是一种数字瞬时频率测量DFM接收器,用于测量目标发射器的频率特征。它们也是一个处理器,有助于方向查找,电子支持措施。它测量发射参数,如脉冲重复频率、振幅、气压/高度和到达时间。然后,它执行脱放,并生成已确定目标的发射轨道。

就雷达而言,互通是计算所有所收集的多个值中误差值最少的计算方法,它是通过间隔发射器收集的连续数据来完成的。这是一个连续的过程,使雷达束更加集中。放归原始序列的数据。脉冲重复频率是每个单位时间重复的脉冲数。单个周期中可变值的变化称为振幅,如果您在图形上看到波,则是波峰(峰值)实现的最高值。Azimuth 是顺时针从北基线或子午线测得的水平角,高程是目标与地平线的距离。
操作
Rudram 1 或 NGARM 的运行可以通过大多数技术指向西方设计趋势来预测。西方主要谈论他们在西亚的战争经历。根据到目前为止已经来的报告, 谈论在启动前锁定 Lobl 和启动后锁定 LOAL 。NGARM 很可能与已知雷达参数、操作模式、融合高度和将某些目标优先于其他目标的程序的威胁联络器进行编程。LOAL 和 LOBL 可能其中有子模式分类。
发射前锁定-
发射前锁定(LOBL)模式在发射前使用导弹接收器获取目标。此模式允许在探索者视野内对发射器进行轴外攻击。它通常被非专用攻击机用作抑制发射器。非专用攻击机不携带特定的发射器定位器,依靠RWR或导弹传感器定位敌方发射者。在LOBL防御模式下,NGARM在发射飞机360度范围内与目标交战,这是一种中短程模式。导弹从飞机的RWR接收目标信息,并给出优先的威胁清单。发射后将参与最高优先级威胁。使用RWR代替导弹传感器,可在整个作战空间中提供更大的排放。
发射后锁定 –
发射后锁定 (LOAL) 模式用于在导弹孔眼的几度范围内对已知类型和位置的发射器进行对峙的最大射程攻击。在此模式下,飞机的机载传感器获取有关雷达身份、类型等的信息,并在导弹飞行时将信息不断上传到导弹中。然后,发射机将投掷导弹,以提供尽可能好的范围。导弹在惯性制导下飞行,直到获得目标,然后返回撞击。在密集的 EW 环境中,可以应用在目标选择方面更准确的特定模式,如果需要,可以进行离轴交配,但需要比基线 LOAL 模式更精确的目标位置信息。目标频率的交错和选择将更加精确,发射很可能在比正常 LOAL 模式更近的范围内进行。
发射后锁定 (LOAL) 模式用于在导弹孔眼的几度范围内对已知类型和位置的发射器进行对峙的最大射程攻击。在此模式下,飞机的机载传感器获取有关雷达身份、类型等的信息,并在导弹飞行时将信息不断上传到导弹中。然后,发射机将投掷导弹,以提供尽可能好的范围。导弹在惯性制导下飞行,直到获得目标,然后返回撞击。在密集的 EW 环境中,可以应用在目标选择方面更准确的特定模式,如果需要,可以进行离轴交配,但需要比基线 LOAL 模式更精确的目标位置信息。目标频率的交错和选择将更加精确,发射很可能在比正常 LOAL 模式更近的范围内进行。
一旦导弹开始终端阶段,它以前选择的模式并不重要。在终端阶段,它开始直接进入,其性能完全取决于入网算法。光导火索将从这一点武装起来,如果发射者关闭GPS/INS和毫米波寻求器将用于进一步的轨迹校正。因此,这种导弹的整体性能在很大程度上取决于作战条件和使用的飞机类型。如果一架配备专用EW-ESM发射器探测能力的飞机可以从更大的对峙范围内发射导弹。导弹还可以从数据链路接收数据。